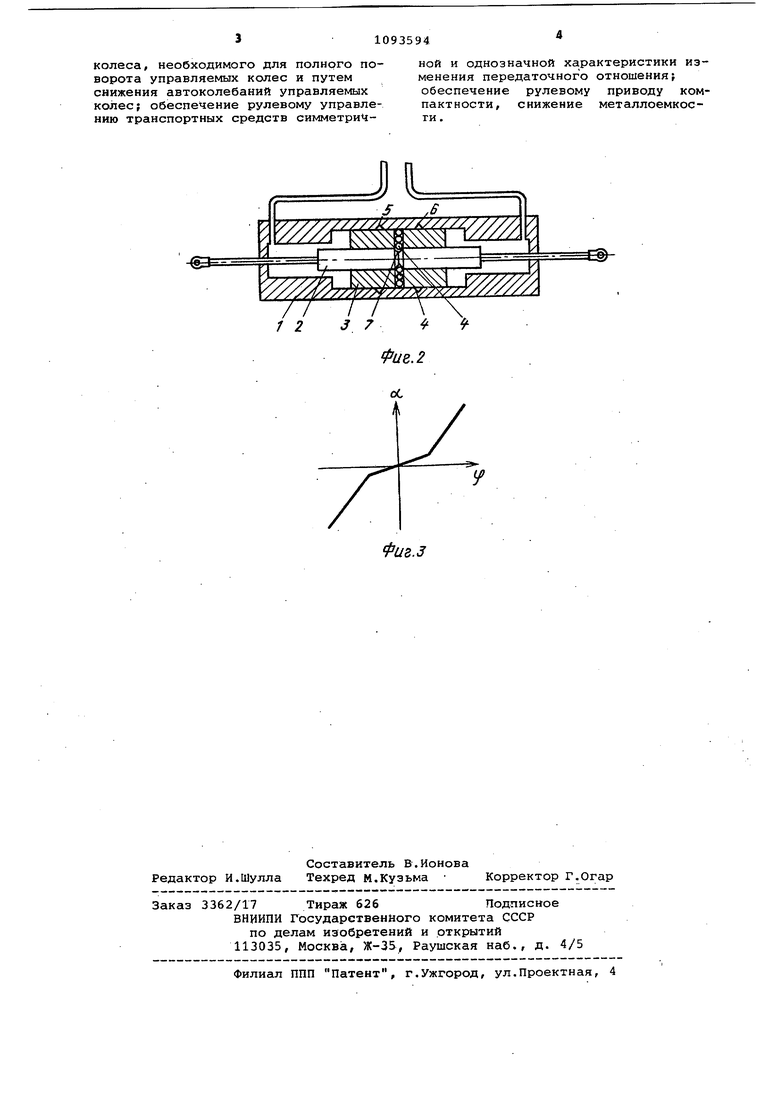
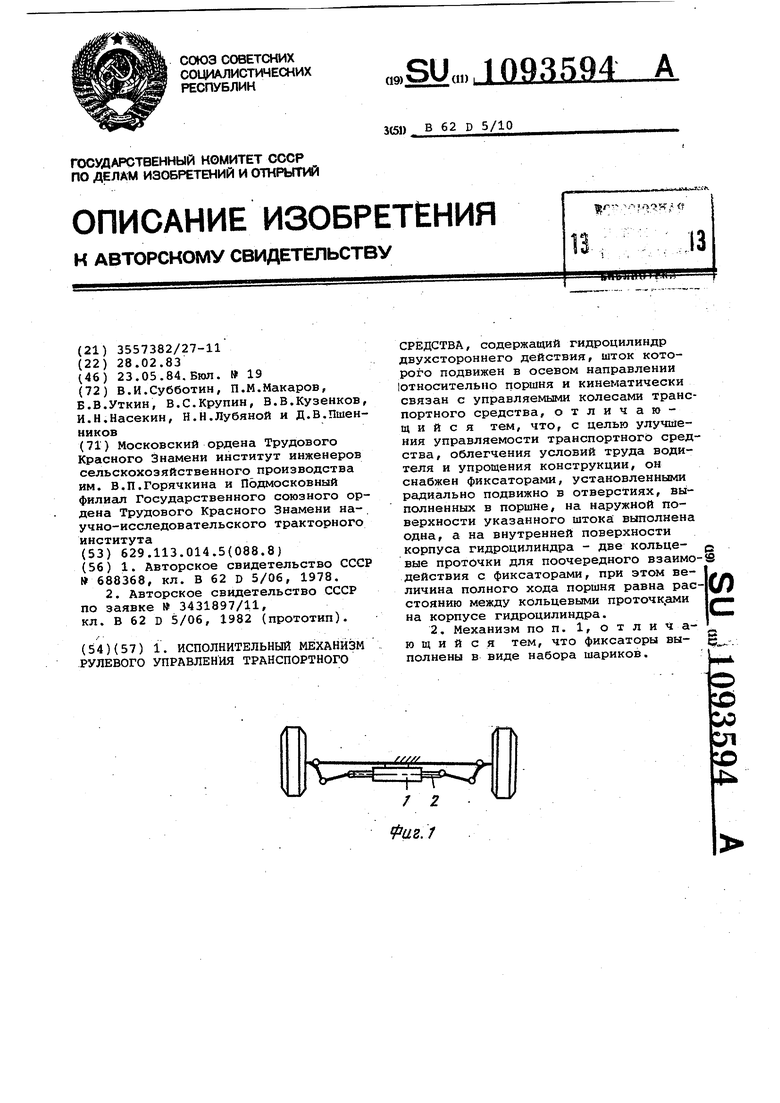
Изобретение относится к транспор ному машиностроению, в частности к рулевому управлению самоходных маши Известен исполнительный механизм рулевого управления транспортного средства, содержащий два гидроцилинд ра, штоки которых кинематически свя заны между собой и с поворотными ко лесами транспортного средства 1L Недостатком данного исполнительно го механизма является то, что он o6e печивает постоянное передаточное от ношение рулевого управления, что нежелательно для машин, имеющих переменный режим работы. Известен также исполнительный ме ханизм рулевого управления транспорт .ного средства, содержащий гидроцилиндр двухстороннего действия, шток которого подвижен в осевом направл нии относительно поршня и кинематически связан с управляемыми колесами транспортного средства 2 . Недостатками известного исполнительного механизма являются значительные габариты, а также возможност возникновения на определенных режимах автоколебаний управляемых колес что ухудшает управляемость транспорт ного средства и повышает утомляемость водителя. Целью изобретения является улучшение управляемости транспортного средства, облегчение условий труда водителя и упрощение конструкции. Поставленная цель достигается тем что исполнительный механизм рулевого управления транспортного средства, содержащий гидроцилиндр двухстороннего действия, шток которого подвижен в осевом направлении относительно поршня И кинематически связан с управляемыми колесами транспортного средства, снабжен фиксаторами, установленными радиально подвижно в отверстиях, выполненных в поршне, на наружной поверхности указанного штока выполнена одна, а на внутренней поверхности корпуса гидроцилиндра - две кольцевые проточки для поочередного взаимодействия с фиксаторами, при этом величина полного хода поршня равна расстоянию между кольце выми проточками на корпусе гидроцилиндра. Кроме того, фиксаторы выполнены в виде набора шариков. На фиг. 1 изображена схема рулево го привода с предлагаемым исполнительным механизмом; на фиг. 2 - конструктивная схема исполнительного ме ханизма; на фиг. 3 - зависимость меж ду углом поворота рулевого колеса ( и углом поворота поворотного рычага (ot;, обеспечиваемая предлагаемым исполнительным механизмом. Исполнительный механизм состоит из гидроцилиндра 1 двухстороннего действия, шток 2 которого подвижен в осевом направлении относительно поршня 3. Поршень снабжен радиально подвижными фиксаторами 4, а корпус гидроцилиндра 1 имеет кольцевые проточки 5 и 6, шток 3 имеет кольцевую проточку 7. Фиксаторы 4 могут быть выполнены в виде набора-шариков. Исполнительный механизм работает следующим образом. При поступлении жидкости в рабочую, например левую, полость гидроцилиндра 1, поршень 3 перемещается вправо вместе соштоком 2, так как фиксаторы 4 смещены к оси гидроцилиндра и, взаимодействуя с кольцевой проточкой 7 на штоке, фиксируют сопряжение поршень - шток. При этом осуществляется поворот управляемых колес, соответствующий пологой ветви характеристики (фиг. 3J. При достижении поршнем 3 крайнего правого положения фиксаторы совмещаются с кольцевой проточкой 6 на корпусе гидроцилиндра и смещаются в эту проточку посредством давления на шток 2 продолжающей поступать жидкости. При этом происходит фиксация сопряжения поршень - корпус гидроцилиндра, а шток продолжает перемещаться вправо, обеспечивая поворот управляемых колес, соответствующий крутой ветви характеристики (фиг. 3). Если направление вращения рулевого колеса изменяется на противоположное, то рабочая жидкость, поступая в правую полость гидроцилиндра, осуществляет перемещение в первую очередь штока 2 до положения, при котором совмещается его проточка 7 с фиксаторами 4. При указанном совмещении происходит смещение фиксаторов в проточку 7, так как имеется давление рабочей жидкости на поршень 3, и осуществляется фиксация сопряжения поршень - шток. Это обеспечивает поворот управляемых колес до нейтрального положения соответственно по той же ломаной характеристике (фиг. 3). Этим достигается однозначность характеристики изменения передаточного отношения рулевого управления. Применение предлагаемого исполнительного механизма рулевого управления транспортного средства обеспечит по сравнению с известными управлениями улучшение управляемости транспортных средств, эксплуатируемых в переменных режимах работы, например прямолинейного движения с частыми крутыми поворотами; снижение утомляемости водителей на 20-60% (в зависимости от выполняемых технологических операций ) при использовании предлагаемого изобретения на тракторах типа Т-25А, Т-ЗОА за счет уменьшения максимального угла поворота рулевого
колеса, необходимого для полного поворота управляемых колес и путем снижения автоколебаний управляемых колес; обеспечение рулевому управлению транспортных средств симметричной и однозначной характеристики изменения передаточного отношения; обеспечение рулевому приводу компактности, снижение металлоемкости.
Л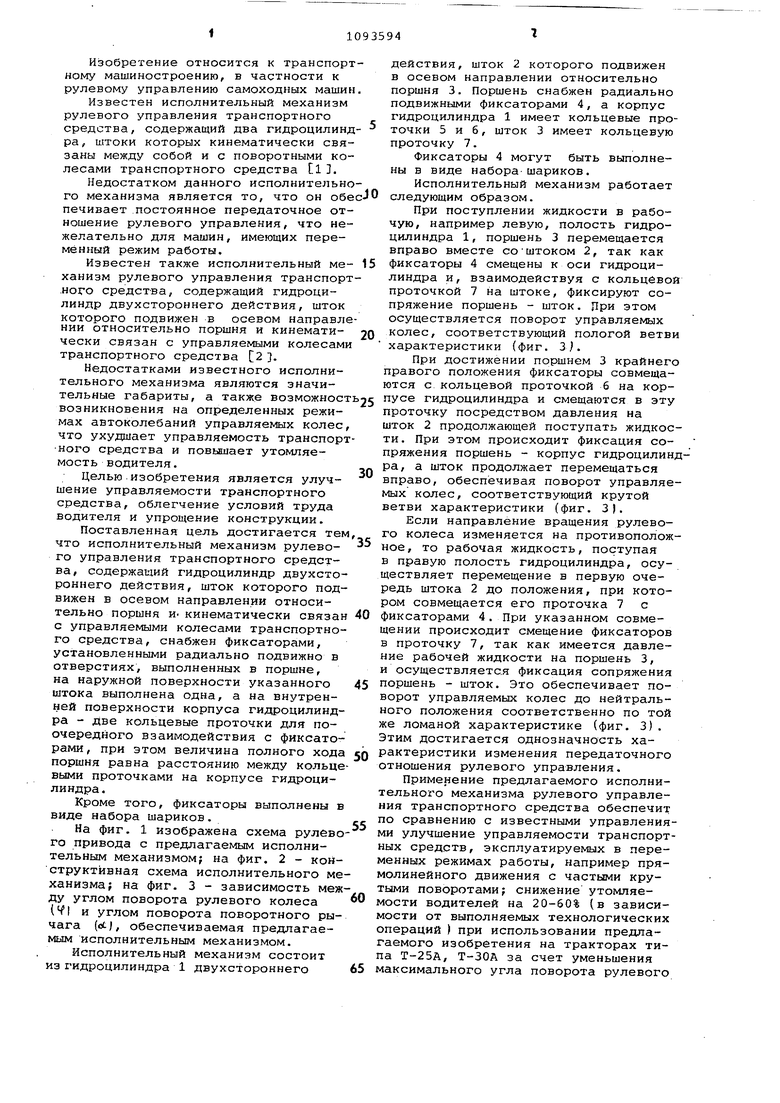
| название | год | авторы | номер документа |
|---|---|---|---|
| Система рулевого управления транспортного средства (ее варианты) | 1982 |
|
SU1022853A1 |
| Исполнительный механизм рулевого управления транспортного средства | 1982 |
|
SU1111924A1 |
| Исполнительный механизм рулевого управления транспортного средства | 1982 |
|
SU1063677A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2156710C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2160679C1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Рулевое управление транспортного средства с шарнирно-сочлененной рамой | 1980 |
|
SU882809A1 |
| Гидравлическая система рулевого управления колесного транспортного средства | 1985 |
|
SU1279898A1 |
| Гидравлическая система управления поворотом гусеничной машины | 1983 |
|
SU1134455A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
Фие.2
Фиг.з
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рулевое управление транспортного средства | 1978 |
|
SU688368A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3431897/Ц, кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
