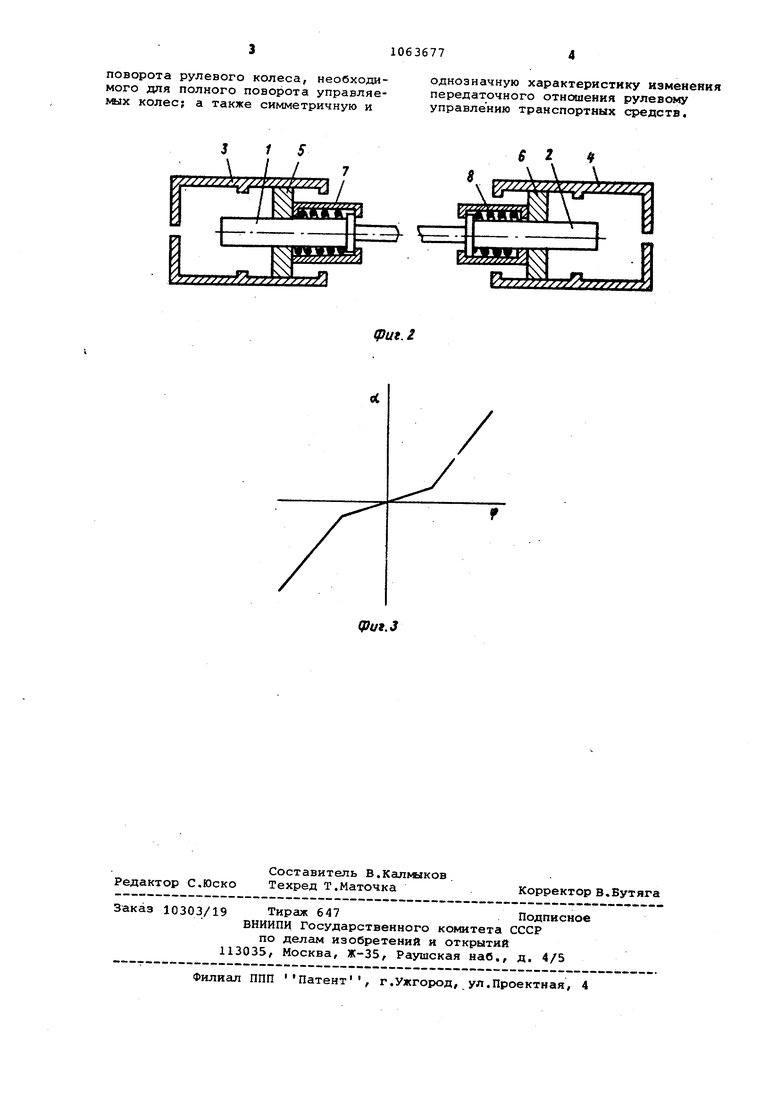
Изобретение относится к транспор ному р ашиностроению, в частности к рулевому управлению самоходных машин , Известен исполнительный механизм рулевого управления транспортного средства, содержащий силовой гидроцилиндр двухстороннего действия шток которого связан с поврротным рычагом рулевой трапеции JLJ о Однако исполнительный механизм не Обеспечивает симметричности кине матигси yпpaвляe 2aIX колес при поворо тах в различные стороны, что объясняется различием объемов штоковой и бесштоковой полостей р и имеет по-стоянное передаточное отношение, не .зависящее от тла поворота управляе мых колес:„ Известен исполнительный механизм рулевого управления транспортного средства, содержащий два гидроцилиндра, штоки которых.кинематически связаны между собой и с поворотными колесами транспортного средства 2 Однако известный исполнительный механизм обеспечивает постоянное пе редаточное отношение рулевого управ ления, что нежелательНО для машин, имеющих переменный режим работы та как napajvieTpH рулевого управления, оптимальные для прямолинейного движения транспортного средства, не являются оптимальными при выполнении разворотов. Использование рулевых управлений с постоянным переда точиым отношением для таких машин н позволяет получить существенного облегчения условий работы водителя высокой маневренности и управляекчости из-за непозможкостк обеспечения максимального поворота рулевого колеса не BjbMe jl20°. Цель изобретения - улучшение управляемости транспортного средств и облегч ;;яа условий работы водител я,, Поставленная цель достигается тем, что в исполнительном механизме рулевого управления транспортного средства,, содержащем два гидроцилинд ра, штоки которых кинематически связаны между собой и с поворотнынти колесами транспортного средства, каждый из упомянутых гидроцилиндров снабжен предварительно сжатой пружиной, установленной между штоком и поршнем, а JJTOKH гидроцилиндров выполнены подБиксными в осевом направлснии относительно поршней, причем ход поршня меньше хода штока, а усилие предварительного сжатия пружины больше усилия,, требуемого на поворот колес транспортного средства На фиг, 1 изображена схема компонсвки рулевого привода с предлагаемы исполнительным механизмом на фиг„2констру;.. ; .7г:ая схема исполнительного устр , aaj на фиг. 3 график зависимости между углом поворота рулевого колеса (С|)) и углом поворота поворотного рычага ((V,) , Штоки 1 и 2 гидроцилиндров 3 и 4 подвижны относительно поршней 5 и 6 и взаимосвязаны с последними через предварительно сжатые пружины 7 и 8. Исполнительный механизм работает следующим образом. При поступлении рабочей жидкости в рабочую полость, например, левого гидроцилиндра 3 поршень 5 из нейтрального положения перемещается вправо и через предварительно сжатую пруткину 7 перемещает шток 1, осуществляя поворот управляемых колес (пологая ветвь характерностики на фиг „ 3) . Усилие, обеспечивающееся предварительным сжатием пружины, должно быть не ниже возможных макси- мальных усилий на поворотных рычагах при осуществлении поворотов управляемых колес транспортного средства во всех возможных режимах эксплуатации, При смещении поршня 5 в крайнее положение и дальнейшем поступлении рабочей жидкости в ту же полость начинает перемещаться вправо шток 1, выполняющий в этом случае роль малого поршня, осуществляя поворот управияемых колес (крутая ветвь характеристики на фиг. 3)„ При этом происходит дополнительное сжатие пру;ки ны 8, Если направление вращения рулевого колеса изменяется на противоположное, то рабочая жидкость, поступая в полость гидроцилиндра 4, осуществляет перемещение в первую очередь штока 2 путем дополните-аьного сжатия пружины 8, а затем поршня 6. Это.обеспечивает поворот управляемых колес до нейтрального положения (ломаная характеристика на фиг, 3), Этим достигается однозначность характеристики изменения передаточного отношения рулевого управленияПрименение предлагаемого -.сполнительного механизма рулевого управления транспортного средства обеспечит улучшение управляемости транспортных средств, эксплуатируемых в переменных режимах работы, например прямолинейного движения с частыми крутым :- поворотами; повышение маневренности, обеспечивающееся тем, что полный поворот управляемых колес осуществляется за угол поворота рулевого колеса равный +120 против ±360-600 на базовых объектах; снижение утоглляемости водителей вследствие уменьшения максимального угла
поворота рулевого колеса, необходимого для полного поворота управляелвлх колес; а также симметричную и
однозначную характеристику изменения передаточного отношения рулевому управлению транспортных средств.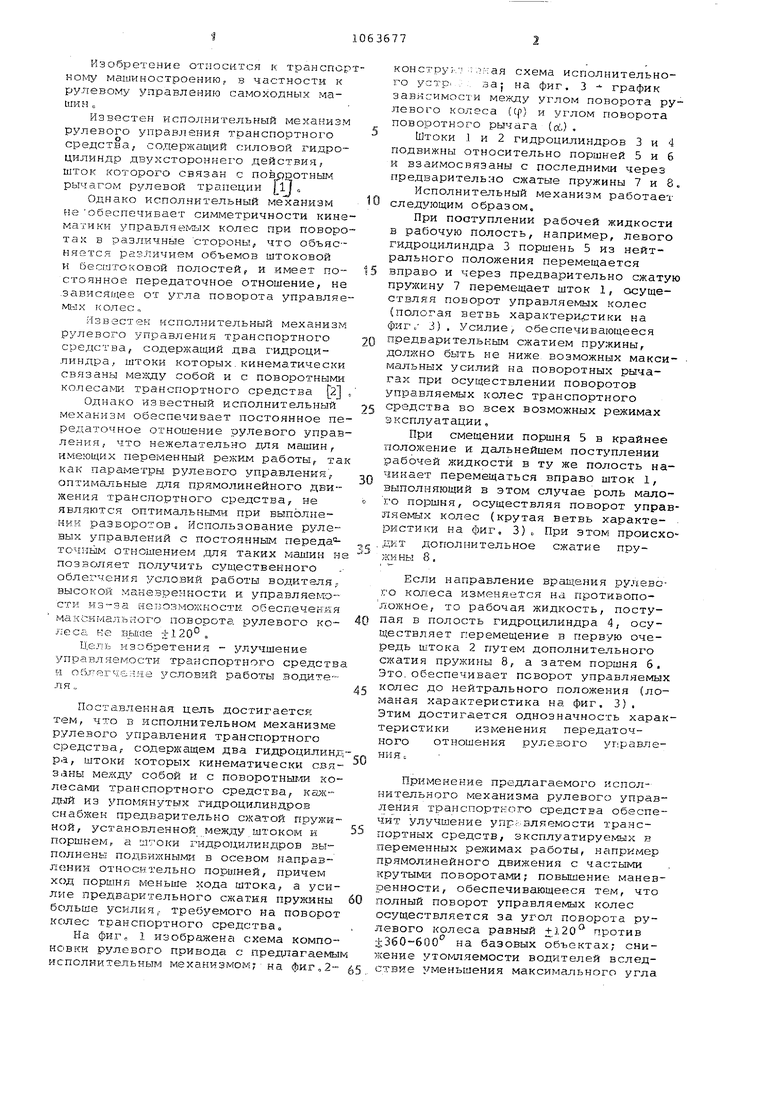
| название | год | авторы | номер документа |
|---|---|---|---|
| Система рулевого управления транспортного средства (ее варианты) | 1982 |
|
SU1022853A1 |
| Исполнительный механизм рулевого управления транспортного средства | 1983 |
|
SU1093594A1 |
| Исполнительный механизм рулевого управления транспортного средства | 1982 |
|
SU1111924A1 |
| Колесное транспортное средство | 1981 |
|
SU1009826A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Транспортное средство | 1980 |
|
SU935325A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2156710C1 |
| Колесное транспортное средство | 1981 |
|
SU998152A2 |
| Колесное транспортное средство | 1985 |
|
SU1260268A1 |
| Колесное транспортное средство | 1981 |
|
SU948704A1 |
ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, содержащий два гидроцилиндра, штоки которых кинематически связаны между собой и с поворотными колесамк транспортного средства, отлич ающийся тем, что, с целью улучшения управляемости и облегчения условий труда водителя, Кс1ждый из упомянутых гидроцилиндров снабжен предварительно сжатой пружиной, установленной между штоком и поршнем, а штоки гидроцилиндров выполнены подвижными в осевом направлении относительно поршней, причем ход поршня меньше хода штока, а усиI лие предварительного сжатил пружины больше УСИЛИЯ, требуемого на пово(Л рот колес транспортного средства. с :лр а: 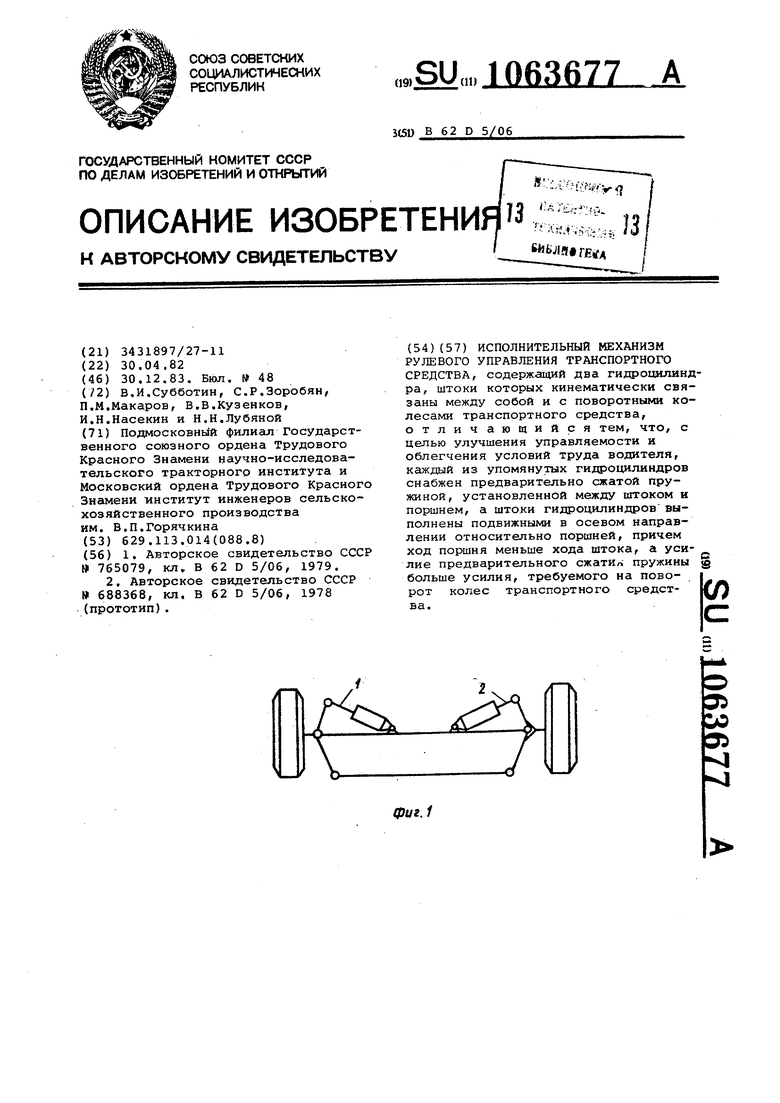
(Риг.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидравлическое рулевое управление транспортного средства | 1977 |
|
SU765079A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рулевое управление транспортного средства | 1978 |
|
SU688368A1 |
