2. Система рулевого управления транспортного средства, содержащая гидравлический рулевой механизм, кинематически связанный с рулевым колесом и гидравлически - с гидронасосом, гидробаком и исполнительным гидроцилиндром поворота, шток которого кинематически связан с поворотным рычагом рулевого пр 1вода, отличающаяся тем, что, с целью улучшения управляемости и повышения маневренности транспортного средства, а также облегчения условий работы водителя, она снабжена дополнительным гидроцилиндром большего диаметра, чем исполнительный гидроцилиндр, корпус которого соединен с рамой транспортного средства, а шток - с корпусом исполнительного гидроцилиндра
поворота, в котором выполнены два нормально перекрытых при положении поршня, соответствующем прямолинейному движению транспортного средства, отверстия, гидравлически соединенные с соответствующими полостями дополнительного гидроцилиндра, и одно отверстие, соединенное с гидробаком, причем в средней части поршня исполнительного цилиндра выполнена проточка, ограничивающая со стенкой корпуса полость, сообщенную с последним из указанных отверстий.
3. Система по пп. 1 и 2, отличающаяся тем, что исполнительный гидроцилиндр поворота и дополнительный гидроцилиндр выполнены с двухштоковыми поршнями.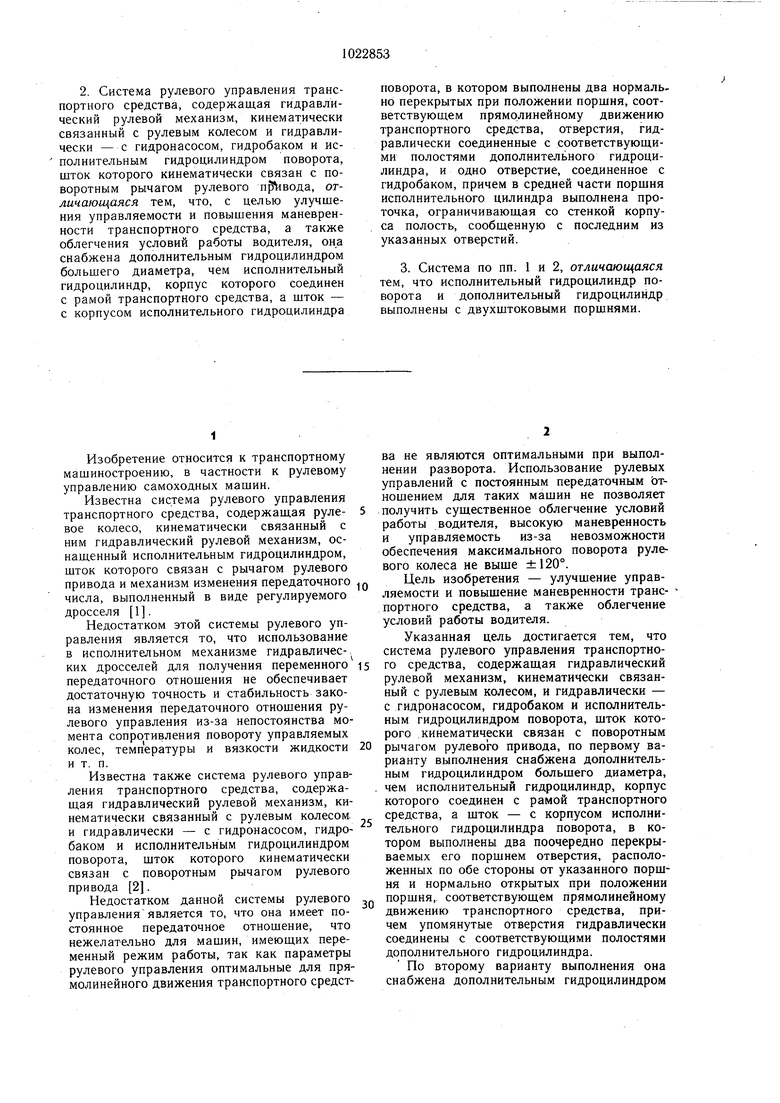
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный механизм рулевого управления транспортного средства | 1982 |
|
SU1063677A1 |
| Исполнительный механизм рулевого управления транспортного средства | 1983 |
|
SU1093594A1 |
| Исполнительный механизм рулевого управления транспортного средства | 1982 |
|
SU1111924A1 |
| Система рулевого управления автопоезда | 1983 |
|
SU1131738A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Гидравлическая система рулевого управления колесного транспортного средства | 1985 |
|
SU1279898A1 |
| Гидравлическое рулевое управление транспортного средства | 1984 |
|
SU1142349A1 |
| Устройство для исследования характеристик движения транспортного средства | 1980 |
|
SU943556A1 |
| Транспортное средство | 1980 |
|
SU935325A1 |
| Гидравлическая система управления поворотом гусеничной машины | 1983 |
|
SU1134455A1 |
1. СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, содержащая гидравлический рулевой механизм, кинематически связанный с рулевым колесом и гидравлически - с гидронасосом, гидробаком и исполнительным гидроцилиндром поворота, шток которого кинематически связан с поворотным рычагом рулевого привода, отличающаяся тем, что, с целью улучшения управляемости и повышения маневренности транспортного средства, а также облегченияусловий работы водителя, она снабжена дополнительным гидроцилиндром большего диаметра, чем исполнительный гидроцилиндр, корпус которого соединен с рамой транспортного средства, а шток - с корпусом исполнительного гидроцилиндра поворота, в котором выполнены два поочередно перекрываемых его поршнем отверстия, расположенных по обе стороны от указанного поршня и нор« мально открытых при положении поршня, соответствуюш,ем прямолинейному движе(Л нию транспортного средства, причем упомянутые отверстия гидравлически соединены с соответствующими полостями дополнительно гидроцилиндра. to ю СХ) 01 00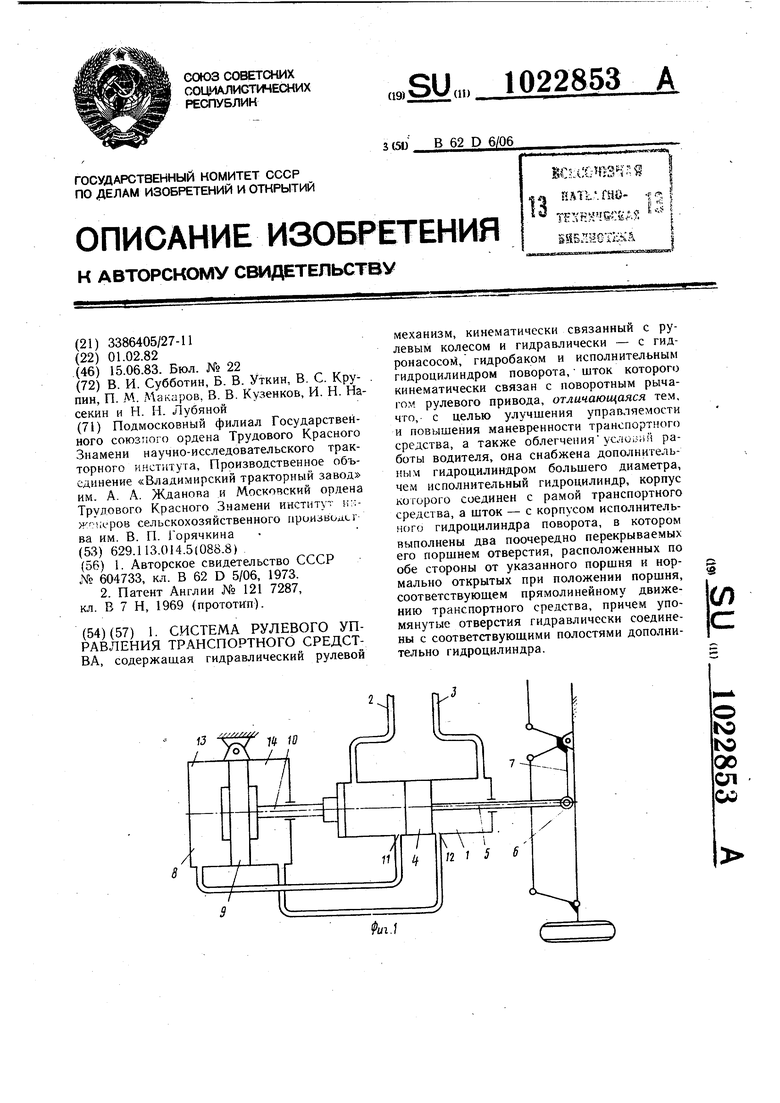
1
Изобретение относится к транспортному машиностроению, в частности к рулевому управлению самоходных машин.
Известна система рулевого управления транспортного средства, содержащая рулевое колесо, кинематически связанный с ним гидравлический рулевой механизм, оснащенный исполнительным гидроцилиндром, шток которого связан с рычагом рулевого привода и механизм изменения передаточного числа, выполненный в виде регулируемого дросселя 1.
Недостатком этой системы рулевого управления является то, что использование в исполнительном механизме гидравлических дросселей для получения переменного передаточного отношения не обеспечивает достаточную точность и стабильность закона изменения передаточного отношения рулевого управления из-за непостоянства момента сопротивления повороту управляемых колес, температуры и вязкости жидкости и т. п.
Известна также система рулевого управления транспортного средства, содержашая гидравлический рулевой механизм, кинематически связанный с рулевым колесом, и гидравлически - с гидронасосом, гидробаком и исполнительным гидроцилиндром поворота, шток которого кинематически связан с поворотным рычагом рулевого привода 2.
Недостатком данной системы рулевого управления является то, что она имеет постоянное передаточное отношение, что нежелательно для машин, имеющих переменный режим работы, так как параметры рулевого управления оптимальные для прямолинейного движения транспортного средства не являются оптимальными при выполнении разворота. Использование рулевых управлений с постоянным передаточным отношением для таких машин не позволяет получить существенное облегчение условий работы водителя, высокую маневренность и управляемость из-за невозможности обеспечения максимального поворота рулевого колеса не выше ±120°.
Цель изобретения - улучшение управляемости и повышение маневренности транспортного средства, а также облегчение условий работы водителя.
Указанная цель достигается тем, что система рулевого управления транспортного средства, содержащая гидравлический рулевой механизм, кинематически связанный с рулевым колесом, и гидравлически - с гидронасосом, гидробаком и исполнительным гидроцилиндром поворота, щток которого кинематически связан с поворотным рычагом рулевого привода, по первому варианту выполнения снабжена дополнительным гидроцилиндром большего диаметра, чем исполнительный гидроцилиндр, корпус которого соединен с рамой транспортного средства, а шток - с корпусом исполнительного гидроцилиндра поворота, в котором выполнены два поочередно перекрываемых его поршнем отверстия, расположенных по обе стороны от указанного поршня и нормально открытых при положении поршня, соответствующем прямолинейному движению транспортного средства, причем упомянутые отверстия гидравлически соединены с соответствующими полостями дополнительного гидроцилиндра.
По второму варианту выполнения она снабжена дополнительным гидроцилиндром
большего диаметра, чем исполнительный гидроцилиндр, корпус которого соединен с рамой транспортного средства, а шток - с корпусод исполнительного гидроцилиндра поворота, в котором выполнены два нормально перекрытых при положении поршня, соответствуюш,ем прямолинейному движению транспортного средства, отверстия, гидравлически соединенные с соответствующими полостями дополнительного гидроцилиндра, и одно отверстие, соединенное с гидробаком, причем в средней части поршня исполнительного цилиндра, выполнена проточка, ограничивающая со стенкой корпуса полость, сообщенную с последним из указанных отверстий.
По обоим вариантам выполнения исполнительный гидроцилиндр поворота и дополнительный гидроцилиндр выполнены с двухштоковыми поршнями.
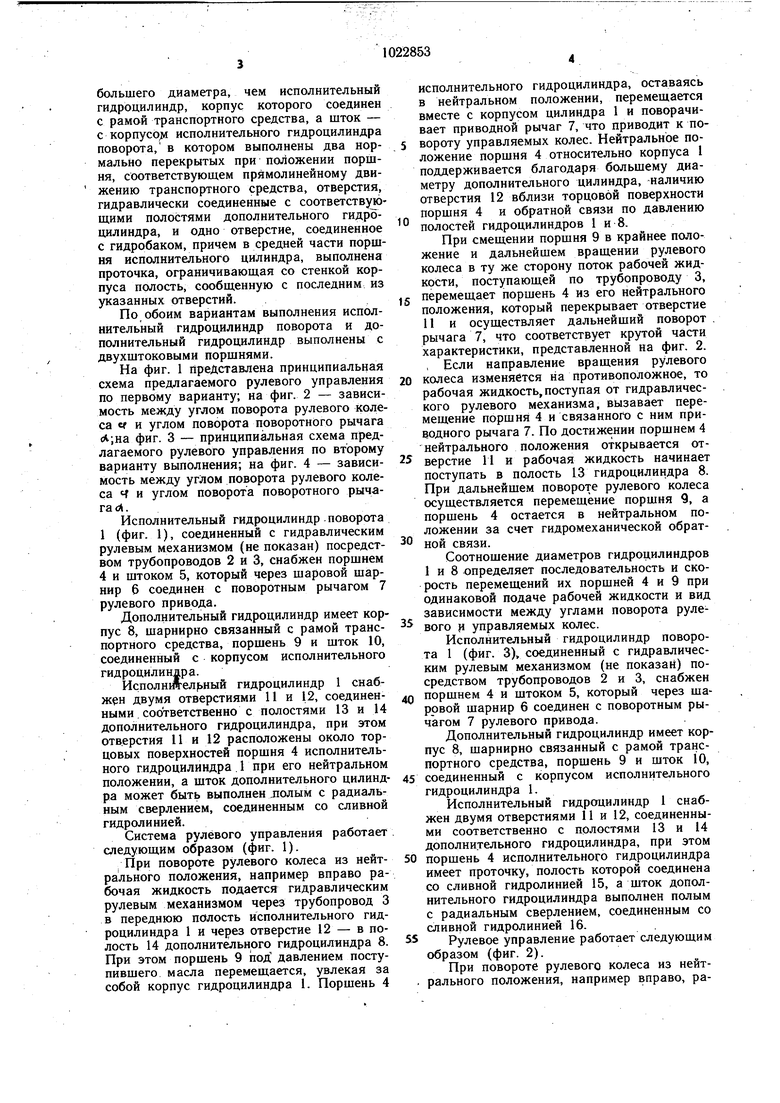
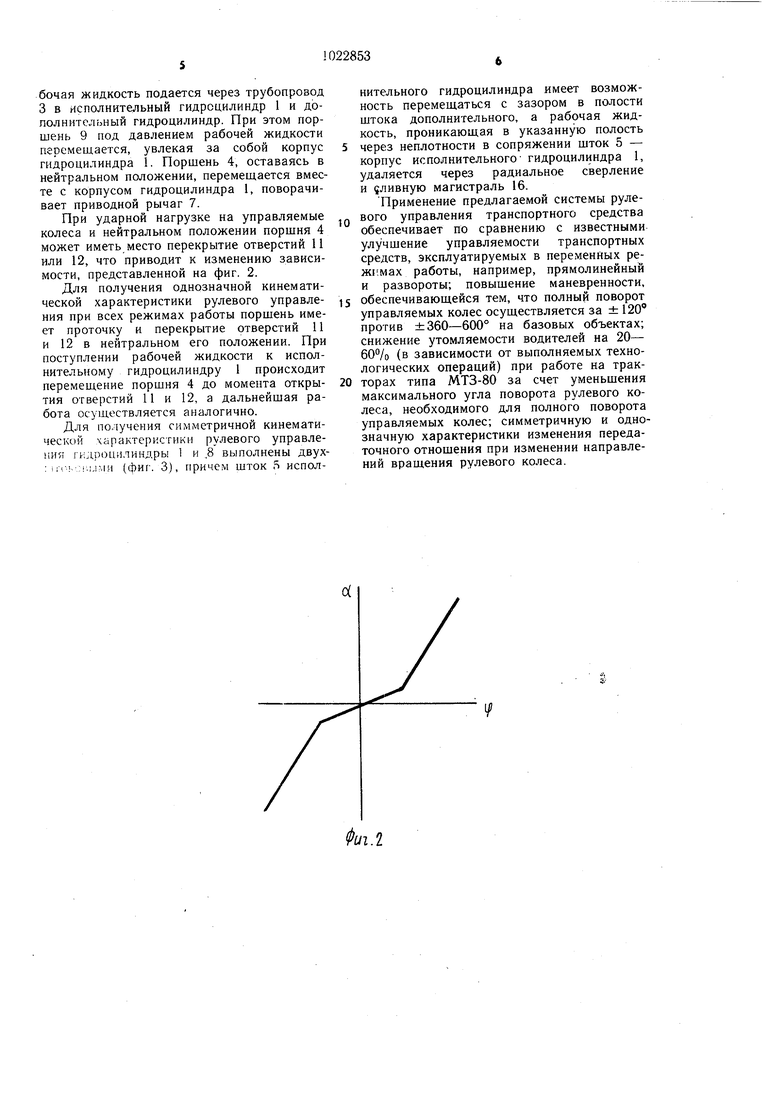
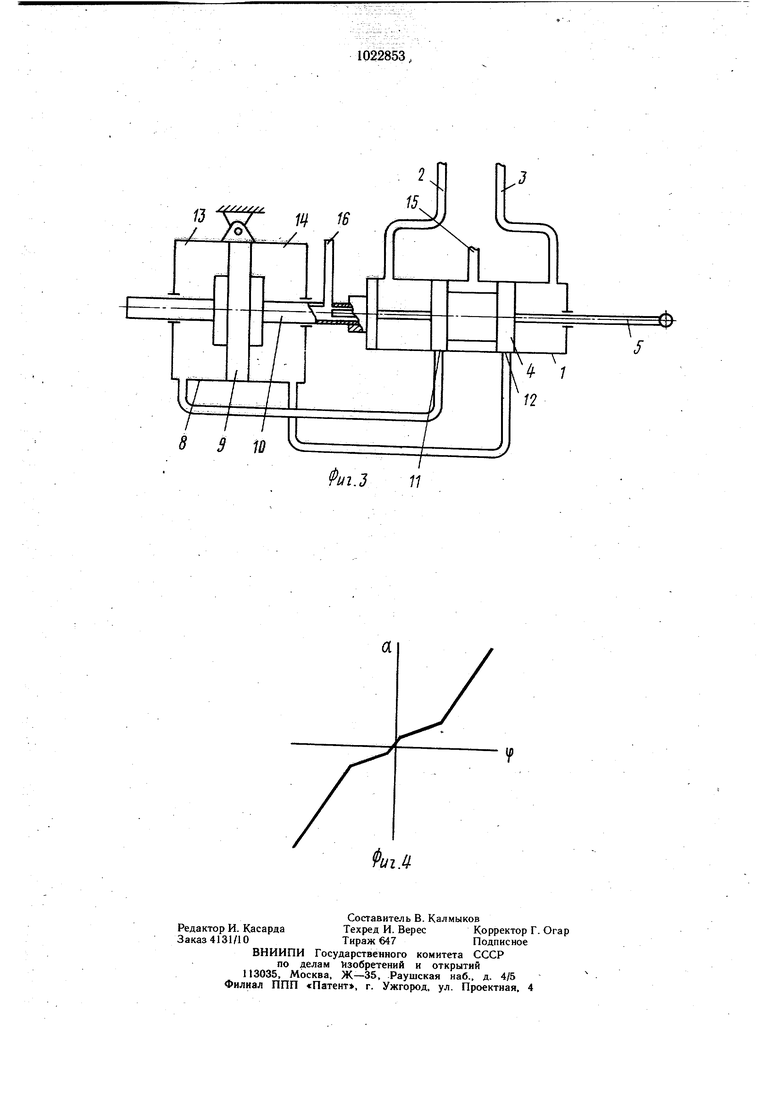
На фиг. 1 представлена принципиальная схема предлагаемого рулевого управления по первому варианту; на фиг. 2 - зависимость между углом поворота рулевого колеса « и углом поворота поворотного рычага А;на фиг. 3 - принципиальная схема предлагаемого рулевого управления по второму варианту выполнения; на фиг. 4 - зависимость между углом поворота рулевого колеса Ч и углом поворота поворотного рычага rt .
Исполнительный гидроцилиндр.поворота 1 (фиг. 1), соединенный с гидравлическим рулевым механизмом (не показан) посредством трубопроводов 2 и 3, снабжен поршнем 4 и штоком 5, который через шаровой шарнир 6 соединен с поворотным рычагом 7 рулевого привода.
Дополнительный гидроцилиндр имеет корпус 8, шарнирно связанный с рамой транспортного средства, поршень 9 и шток 10, соединенный с корпусом исполнительного гидроцилиндра.
Исполн1Аел ный гидроцилиндр 1 снабжен двумя отверстиями И и 12, соединенными соответственно с полостями 13 и 14 дополнительного гидроцилиндра, при этом отверстия 11 и 12 расположены около торцовых поверхностей поршня 4 исполнительного гидроцилиндра 1 при его нейтральном положении, а щток дополнительного цилиндра может быть выполнен лолым с радиальным сверлением, соединенным со сливной гидролинией.
Система рулевого управления работает следующим образом (фиг. 1).
При повороте рулевого колеса из нейтрального положения, например вправо рабочая жидкость подается гидравлическим рулевым механизмом через трубопровод 3 в переднюю полость исполнительного гидроцилиндра 1 и через отверстие 12 - в полость 14 дополнительного гидроцилиндра 8. При этом поршень 9 под давлением поступившего масла перемещается, увлекая за собой корпус гидроцилиндра 1. Поршень 4
исполнительного гидроцилиндра, оставаясь в нейтральном положении, перемещается вместе с корпусом цилиндра 1 и поворачивает приводной рычаг 7, что приводит к повороту управляемых колес. Нейтральное положение поршня 4 относительно корпуса I поддерживается благодаря большему диаметру дополнительного цилиндра, наличию отверстия 12 вблизи торцовой поверхности поршня 4 и обратной связи по давлению полостей гидроцилиндров 1 и 8.
При смещении поршня 9 в крайнее положение и дальнейшем вращении рулевого колеса в ту же сторону поток рабочей жидкости, поступающей по трубопроводу 3, с перемещает поршень 4 из его нейтрального положения, который перекрывает отверстие 11 и осуществляет дальнейший поворот рычага 7, что соответствует крутой части характеристики, представленной на фиг. 2. , Если направление вращения рулевого 0 колеса изменяется на противоположное, то рабочая жидкость, поступая от гидравлического рулевого механизма, вызавает перемещение поршня 4 и связанного с ним приводного рычага 7. По достижении поршнем 4 нейтрального положения открывается от5 верстие 11 и рабочая жидкость начинает поступать в полость 13 гидроцилиндра 8. При дальнейшем повороте рулевого колеса осуществляется перемещение поршня 9, а поршень 4 остается в нейтральном положении за счет гидромеханической обрат ной связи.
Соотношение диаметров гидроцилиндров 1 и 8 определяет последовательность и скорость перемещений их поршней 4 и 9 при одинаковой подаче рабочей жидкости и вид зависимости между углами поворота рулевого н управляемых колес.
Исполнительный гидроцилиндр поворота 1 (фиг. 3), соединенный с гидравлическим рулевым механизмом (не показан) посредством трубопроводов 2 и 3, снабжен поршнем 4 и штоком 5, который через шаровой шарнир 6 соединен с поворотным рычагом 7 рулевого привода.
Дополнительный гидроцилиндр имеет корпус 8, шарнирно связанный с рамой транспортного средства, поршень 9 и шток 10, 5 соединенный с корпусом исполнительного гидроцилиндра 1.
Исполнительный гидроцилиндр 1 снабжен двумя отверстиями 11 и 12, соединенными соответственно с полостями 13 и 14 дополнительного гидроцилиндра, при этом поршень 4 исполнительного гидроцилиндра имеет проточку, полость которой соединена со сливной гидролинией 15, а шток дополнительного гидроцилиндра выполнен полым с радиальным сверлением, соединенным со сливной гидролинией 16.
5 Рулевое управление работает следующим образом (фиг. 2).
При повороте рулевого колеса из нейт, рального положения, например вправо, рабочая жидкость подается через трубопровод 3 в исполнительный гидроцилиндр 1 и дополнительный гидроцилиндр. При этом поршень 9 под давлением рабочей жидкости перемещается, увлекая за собой корпус гидроцилиндра 1. Поршень 4, оставаясь в нейтральном положении, перемещается вместе с корпусом гидроцилиндра 1, поворачивает приводной рычаг 7.
При ударной нагрузке на управляемые колеса и нейтральном положении поршня 4 может иметь место перекрытие отверстий И или 12, что приводит к изменению зависимости, представленной на фиг. 2.
Для получения однозначной кинематической характеристики рулевого управления при всех режимах работы поршень имеет проточку и перекрытие отверстий 11 и 12 в нейтральном его положении. При поступлении рабочей жидкости к исполнительному гидроцилиндру 1 происходит перемещение поршня 4 до момента открытия отверстий 11 и 12, а дальнейшая работа осуществляется аналогично.
Для получения симметричной кинематической характеристики рулевого управления гкдроцилиндры 1 и ,8 выполнены двух: 1 iЧ, :,,ми (фиг . 3), причем щток S исполнительного гидроцилиндра имеет возможность перемещаться с зазором в полости штока дополнительного, а рабочая жидкость, проникающая в указанную полость через неплотности в сопряжении шток 5 - корпус исполнительного гидроцилиндра 1, удаляется через радиальное сверление и {ливную магистраль 16.
Применение предлагаемой системы рулевого управления транспортного средства обеспечивает по сравнению с известными улучшение управляемости транспортных средств, эксплуатируемых в переменных режг.мах работы, например, прямолинейный и развороты; повышение маневренности,
обеспечивающейся тем, что полный поворот управляемых колес осуществляется за ± 120 против ±360-600° на базовых объектах; снижение утомляемости водителей на 20- 60°/о (в зависимости от выполняемых технологических операций) при работе на тракторах типа МТЗ-80 за счет уменьшения максимального угла поворота рулевого колеса, необходимого для полного поворота управляемых колес; симметричную и однозначную характеристики изменения передаточного отношения при изменении направлений вращения рулевого колеса.
иг.З 11
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидравлическое рулевое управление транспортного средства | 1974 |
|
SU604733A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ребристый каток | 1922 |
|
SU121A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
