со 4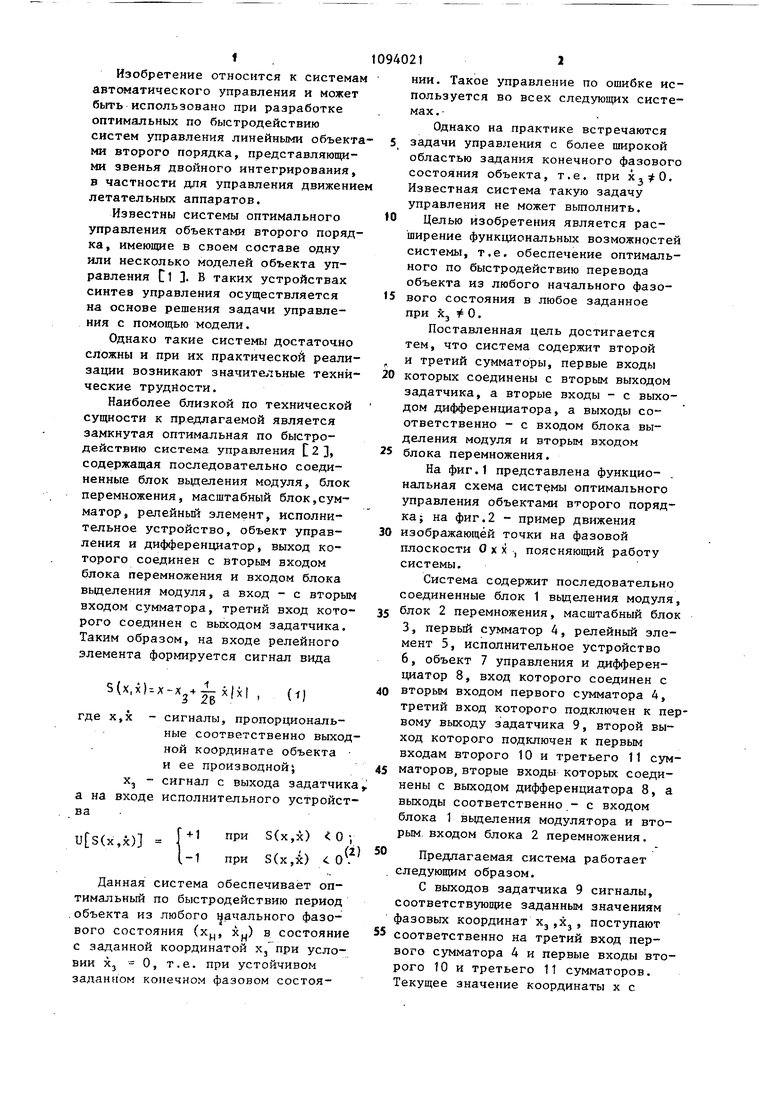
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор с ограничением управляющего воздействия | 1986 |
|
SU1383287A1 |
| Релейная система | 1979 |
|
SU898384A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| Система оптимального управления объектами второго порядка | 1988 |
|
SU1620987A2 |
| Оптимальная по быстродействию позиционная система управления | 1990 |
|
SU1734072A1 |
| Система автоматического регулирования | 1985 |
|
SU1265694A1 |
| Устройство для оптимального управления объектами второго порядка | 1982 |
|
SU1078404A1 |
| Устройство для оптимального по быстродействию управления | 1973 |
|
SU447683A1 |
| Система с переменной структурой | 1980 |
|
SU890361A1 |
| Система автоматического регулирования | 1981 |
|
SU1029135A1 |
СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ВТОРОГО ПОРЯДКА, , содержащая последовательно соединенные блок вьщелений модуля, блок перемножения, масштабный блок, пер- BMi..:.. вый сумматор, релейный элемент, исполнительное устройство, объект управления и дифференциатор, вход которого соединен с вторым входом первого сумматора, третий вход которого подключен к первому выходу задатчика, отличающаяся тем, что, с целью расширения функ-. циональных возможностей системы, она содержит второй и третий сумматоры, первые входы которых соединены с вторым выходом задатчика, а вторые входы - с выходом дифференциатора, а выходы соответственно с входом блока вьщеления модуля и вторым входом блока перемножения.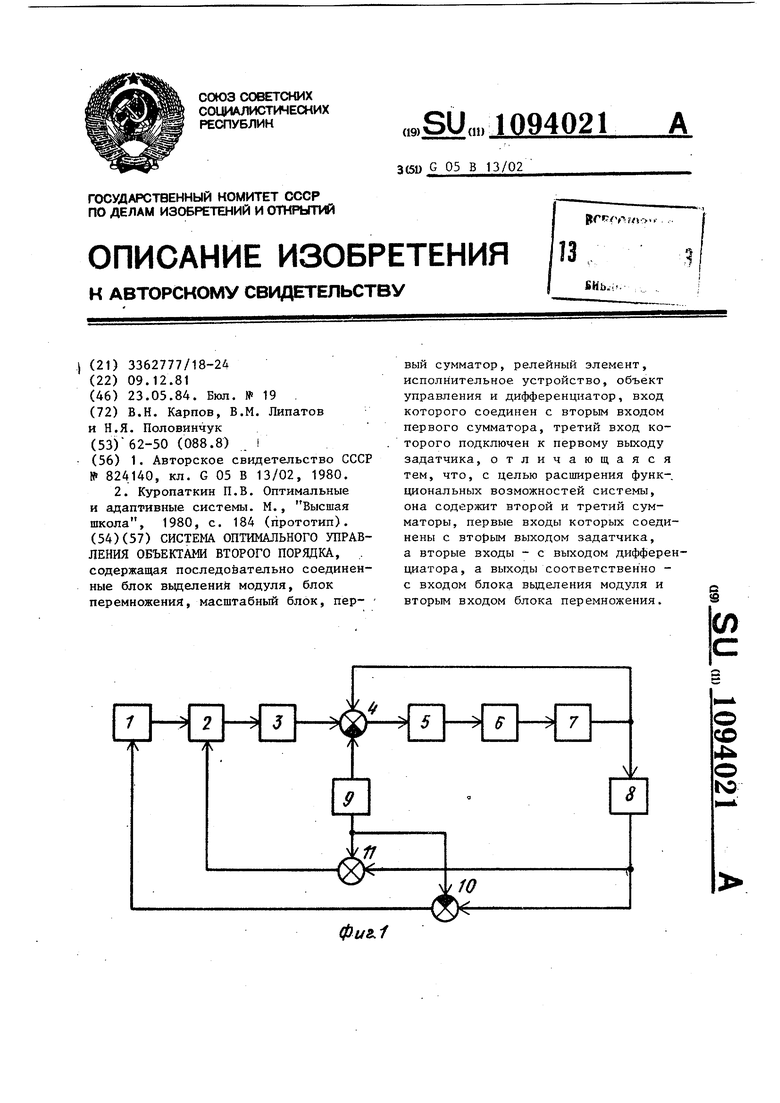
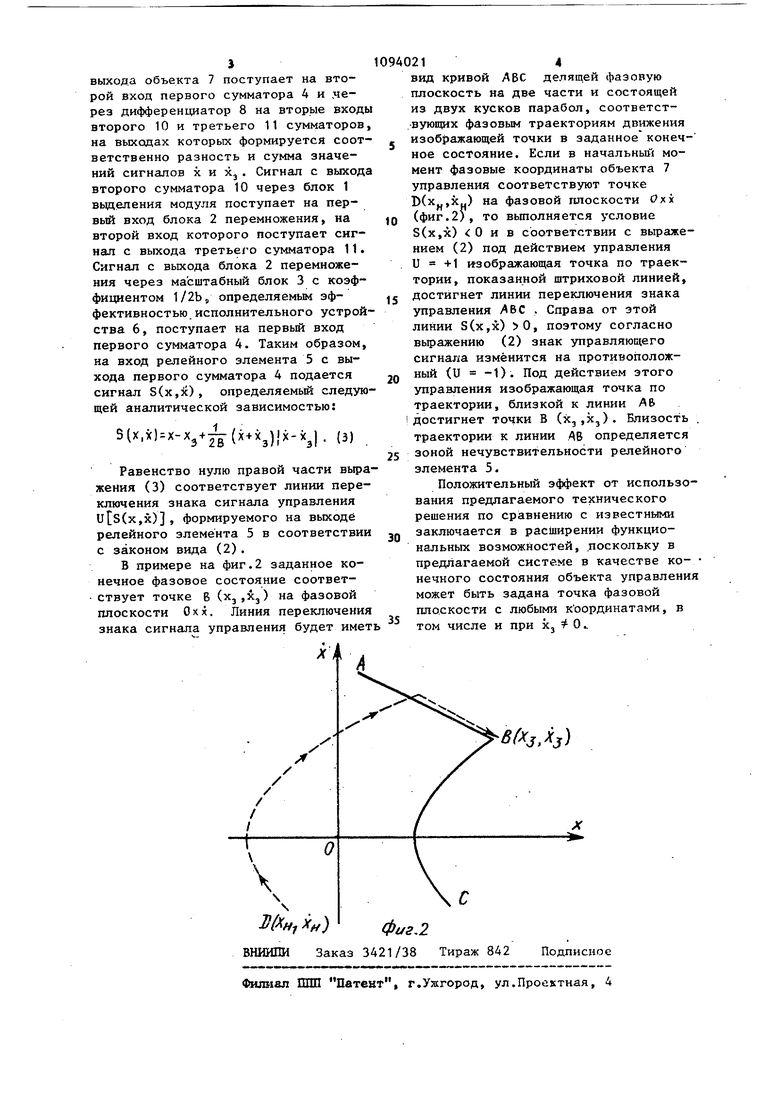
фи&.1 Изобретение относится к система автоматического управления и может быть использовано при разработке оптимальных по быстродействию систем управления линейными объект ми второго порядка, представляющими звенья двойного интегрирования в частности для управления движени летательных аппаратов. Известны системы оптимального управления объектами второго поряд ка, имеющие в своем составе одну или несколько моделей объекта управления Cl . В таких устройствах синтез управления осуществляется на основе решения задачи управления с помощью модели. Однако такие системы достаточно сложны и при их практической реали зации возникают значительные техни ческие трудности. Наиболее близкой по технической сущности к предлагаемой является замкнутая оптимальная по быстродействию система управления С 2 , содержащая последовательно соединенные блок вьщеления модуля, блок перемножения, масштабный блок,сумматор, релейньй элемент, исполнительное устройство, объект управления и дифференциатор, выход которого соединен с вторым входом блока перемножения и входом блока вьщеления модуля, а вход - с вторы входом сумматора, третий вход кото рого соединен с выходом задатчика. Таким образом, на входе релейного элемента формируется сигнал вида S(x,x):. , (Я где х,х - сигналы, пропорциональные соответственно выхо ной координате объекта и ее производной; х, - сигнал с выхода задатчи а на входе исполнительного устройс ва + 1 при S(x,x) 0 (x,x) -1 при S(x,x) Данная система обеспечивает оптимальный по быстродействию период .объекта из любого цачального фазового состояния (х. в состояни с заданной координатой х, при усло вии Xj - О, т.е. при устойчивом заданном конечном фазовом состояНИИ. Такое управление по ошибке используется во всех следующих системах . Однако на практике встречаются задачи управления с более широкой областью задания конечного фазового состояния объекта, т.е. при . Известная система такую задачу управления не может выполнить. Целью изобретения является расширение функциональных возможностей системы, т.е. обеспечение оптимального по быстродействию перевода объекта из любого начального фазового состояния в любое заданное при Xj О. Поставленная цель достигается тем, что система содержит второй и третий сумматоры, первые входы которых соединены с вторым выходом задатчика, а вторые входы - с выходом дифференциатора, а выходы соответственно - с входом блока выделения модуля и вторым входом блока перемножения. На фиг.1 представлена функцио- . напьная схема системы оптимального управления объектами второго порядка ; на фиг.2 - пример движения изображающей точки на фазовой плоскости О X X , поясняющий работу системы. Система содержит последовательно соединенные блок 1 вьщеления модуля, блок 2 перемножения, масштабный блок 3, первый сумматор 4, релейный элемент 5, исполнительное устройство 6, объект 7 управления и дифференциатор 8, вход которого соединен с вторым входом первого сумматора 4, третий вход которого подключен к первому выходу задатчика 9, второй выход которого подключен к первым входам второго 10 и третьего 11 сумматоров, вторые входы которых соединены с выходом дифференциатора 8, а выходы соответственно - с входом блока 1 вьщеления модулятора и вторьм входом блока 2 перемножения. Предлагаемая система работает следующим образом. С выходов задатчика 9 сигналы, соответствующие заданным значениям фазовых координат Xj,Xj, поступают соответственно на третий вход первого сумматора 4 и первые входы второго 10 и третьего 11 сумматоров. Текущее значение координаты х с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Радиотелеграфный регенеративный приемник | 1923 |
|
SU824A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Куропаткин П.В | |||
| Оптимальные и адаптивные системы | |||
| М., Высшая школа, 1980, с | |||
| Переносная печь-плита | 1920 |
|
SU184A1 |
