оо
00
со to
00
13
Изобретение относится к области автоматического управления и предназначено для управления изменением
различных параметров в системах авто
матического управления, где управляющее воздействие ограничено по величине и пропорционально ускорению изменения параметра.
Цель изобретения - повышение ка- честна управления.
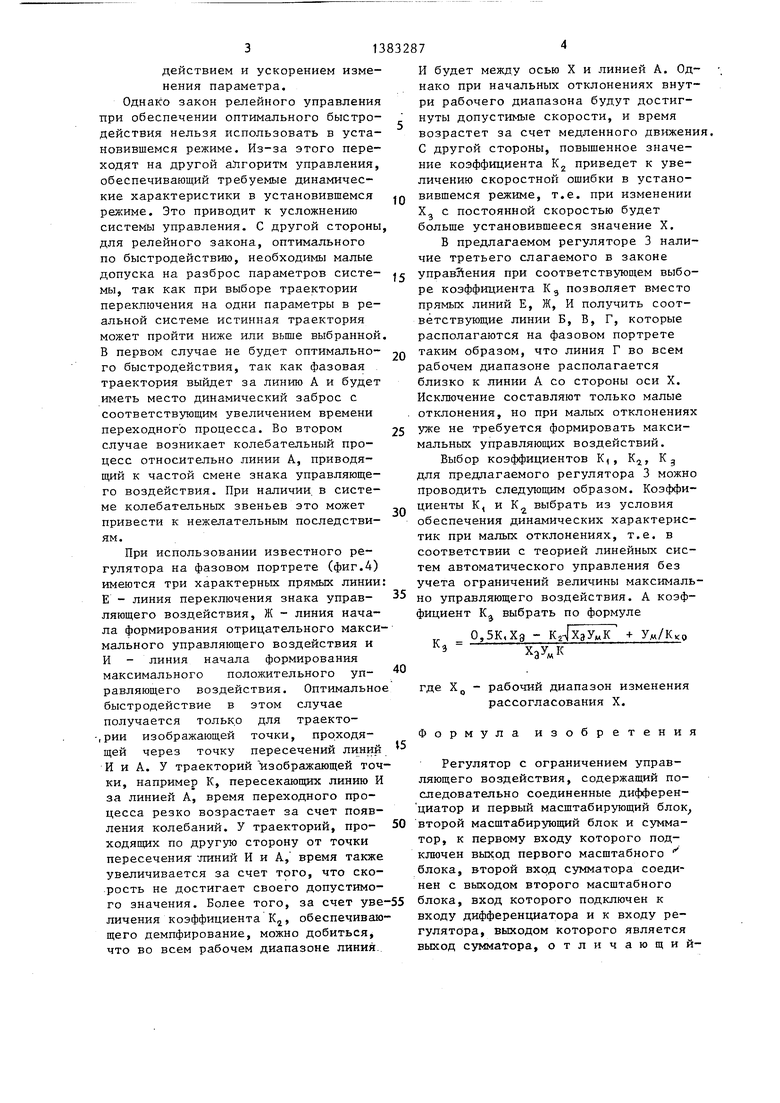
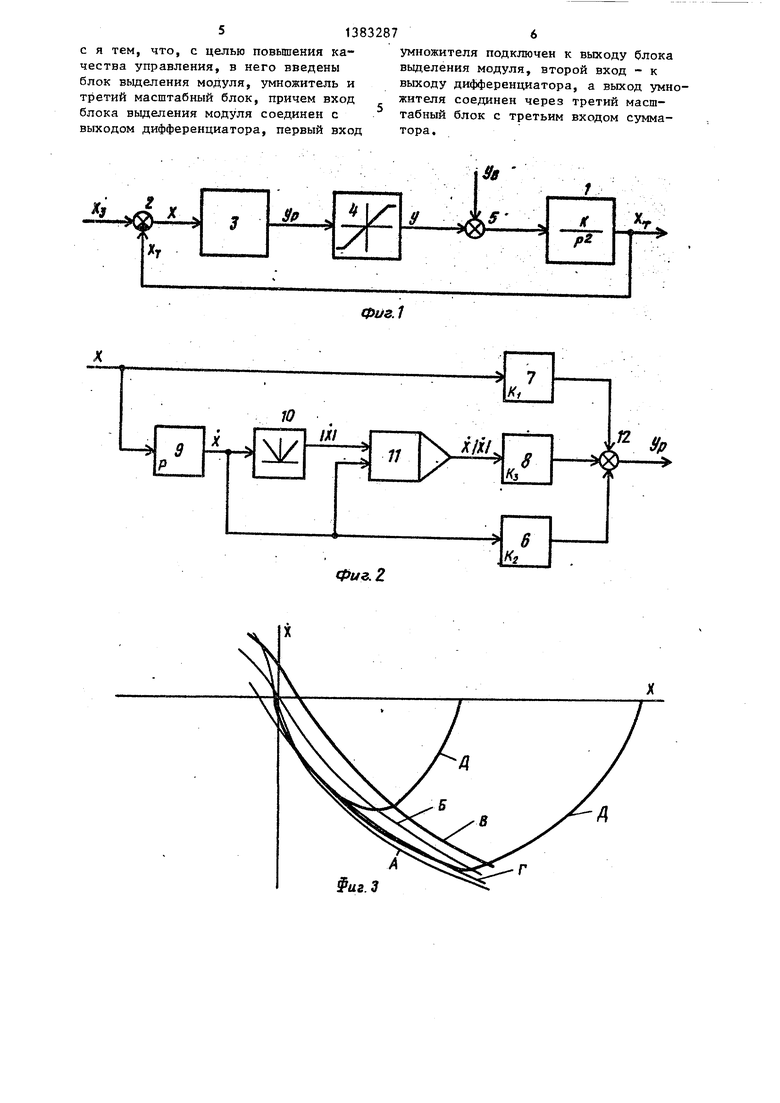
На фиг. 1 изображена функциональ- ная блок-схема системы автоматического управления с ограничением управляющего воздействия объекта с аста- тизмом второго порядка на фиг. 2,- функциональная блок-схема предлагаемого регулятора; на фиг. 3 и 4 - фазовые портреты характерных линий.
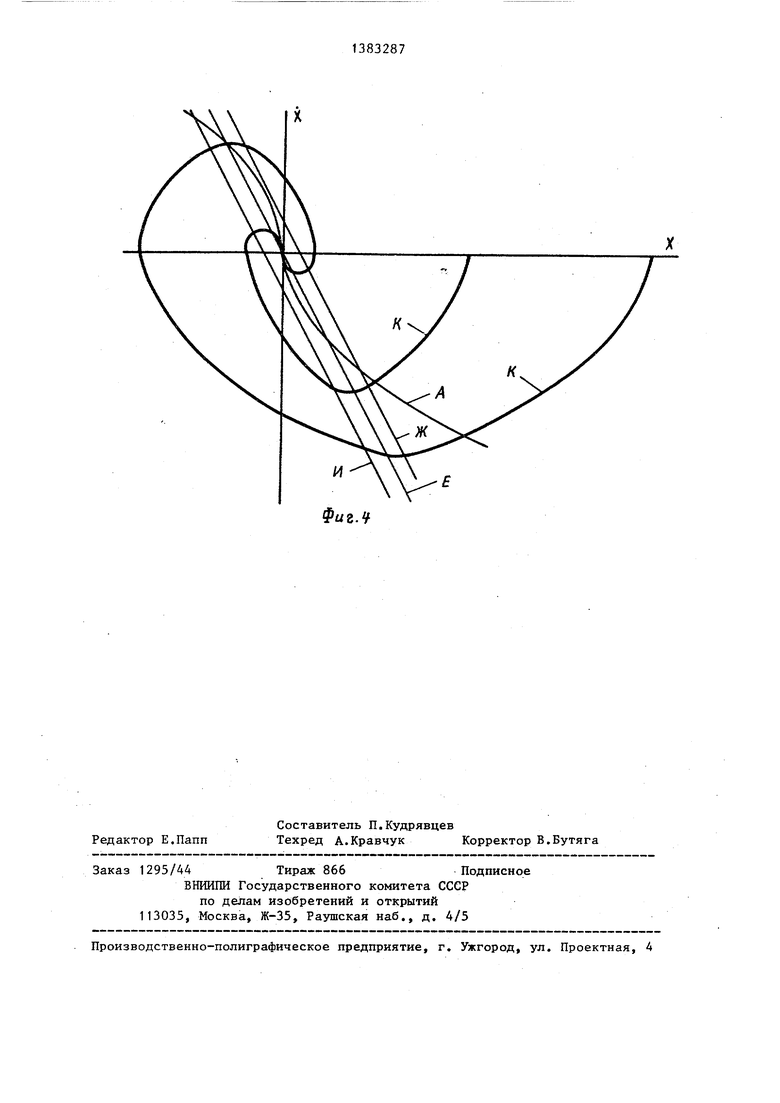
На фиг. 3 и 4 А - траектория оптимального по быстродействию движения при ограниченном управляющем воздействии, Б - линия перехода управляющего воздействия через ноль, В - линия начала формирования максимального отрицательного управляющего воздействия, Г - линия начала формирования максимального положительного управлящего воздействия, Д - фазовые траектории движения изображающей точки при использовании предлагаемого регулятора, Е, Ж, И-- линии формирования соответственно нулевого, начала максимального отрицательного и нач.ала максимального положительного управляющего воздействия при использовании известного регулятора, К - фазовые траектории движения изображающей точки при использовании из- вестнрго регулятора.
Система управления изменением параметра Х- объекта 1 содержит датчик 2 отклонения параметра, изображенный в в)эде элемента сравнезшя, регулятора 3 и исполнительный орган 4. Предлагаемый регулятор наиболее эффективен при использовании в системах
управления, в которых управляющее воздействие пропорционально ускорению текущего значения параметра Х и максимальное значение управляющего воздействия ограничено.
Датчик 2 обеспечивает формирование сигнала рассогласования по закону
X Xj X
т
где X сигнал рассогласования между задающим и текущие значениями параметра;
Х - задающее значение параметра Х - текущее значение параметра. Регулятор 3 обеспечивает формирование управляющего сигнала Ур на исполнительный орган 4. Исполнительный орган 4 обеспечивает формирование управляющего воздействия У по закону
К,Ур при /Ур/г У sign Ур при
Ум
/Уу/
УМ
Ко
о
0
5
5
0
где
Р
У АЛ
К, управляющее воздействиеj управляющий сигнал с регулятора 3;
максимальное значение управляющего воздействия, коэффициент пропорциональности.
Управляющее воздействие У приводит к созданию ускорения текущего значения параметра Х-. Параллельно управляющему воздействию на объект 1 обычно действует возмущающее воздействие Уд, что условно изображено с помощью сумматора 5.
Предлагаемый регулятор 3 содержит первый, второй и третий масщтабные блоки 6-8, дифференциатор 9, блок 10 вьщеления модуля, умножитель 11, и сумматор 12; Тогда выходной сигнал У„ с регулятора 3 будет формироваться по закону
Ур К,Х + + KjX/X/, где К,, К,
Ч
к,2--
коэффициенты усиления масштабных блоков 6-8 соответственно.
Указанный закон формирования сигнала Ур от известного отличается наличием третьего слагаемого, модуль i которого пропорционален квадрату ско- 5 рости сигнала X рассогласования. Максимальное быстродействие в системах с ограничением управляющего воздействия достигается при релейном управлении, в котором знак фор- 0 мируемого максимального управляющего воздействия изменяется при попадании изображающей точки на фазовом портрете на траекторию А, оптимальную по быстродействию и заданную урав- 5 нением
X
- sign X,
где К - коэффициент пропорциональности между управляющим воз10
15
20
25
31383287
действием и ускорением изменения параметра.
Однако закон релейного управления при обеспечении оптимального быстродействия нельзя использовать в установившемся режиме. Из-за этого переходят на другой алгоритм управления, обеспечивающий требуемые динамические характеристики в установившемся режиме. Это приводит к усложнению системы управления. С другой стороны, для релейного закона, оптимального по быстродействию, необходимы малые допуска на разброс параметров системы, так как при выборе траектории переключения на одни параметры в реальной системе истинная траектория может пройти ниже или выше выбранной. В первом случае не будет оптимального быстродействия, так как фазовая траектория выйдет за линию А и будет иметь место динамический заброс с соответствующим увеличением времени переходного процесса. Во втором случае возникает колебательный процесс относительно линии А, приводящий к частой смене знака управляющего воздействия. При наличии, в системе колебательных звеньев это может привести к нежелательным последствиям.
При использовании известного регулятора на фазовом портрете (фиг.4) имеются три характерных прямых линии: Е - линия переключения знака управляющего воздействия, Ж - линия начала формирования отрицательного максимального управляющего воздействия и И - линия начала формирования максимального положительного уп равляющего воздействия. Оптимальное быстродействие в этом случае получается только для траекто- рии изображающей точки, проходящей через точку пересечений линий И и А. У траекторий изображающей точки, например К, пересекающих линию И за линией А, время переходного процесса резко возрастает за счет появления колебаний. У траекторий, про- 50 ходящих по другую сторону от точки пересечения -линий И и А, время также увеличивается за счет того, что скорость не достигает своего допустимого значения. Более того, за счет уве-55 личения коэффициента К, обеспечивающего демпфирование, можно добиться, что во всем рабочем диапазоне линия.
30
35
, 40
н н в ни ли ви бо
чи уп ре пр ве ра та ра бл Ис от уж ма
дл пр ци об ти со те уч но фи
гд
Ф
ля сл ци вт то кл бл не бл вх гу вы
10
5
0
5
0 5
0
5
И будет между осью X и линией А. Однако при начальных отклонениях внутри рабочего диапазона будут достигнуты допустимые скорости, и время возрастет за счет медленного движения. С другой стороны, повышенное значение коэффициента К приведет к увеличению скоростной ошибки в установившемся режиме, т.е. при изменении Хд с постоянной скоростью будет больше установившееся значение X.
В предлагаемом регуляторе 3 наличие третьего слагаемого в законе управления при соответствуюпщм выборе коэффициента К позволяет вместо прямых линий Е, ж, и получить соответствующие линии Б, В, Г, которые располагаются на фазовом портрете таким образом, что линия Г во всем рабочем диапазоне располагается близко к линии А со стороны оси X. Исключение составляют только малые отклонения, но при мальгх отклонениях уже не требуется формировать максимальных управляюпщх воздействий.
Выбор коэффициентов К,, К, Kg для предлагаемого регулятора 3 можно проводить следующим образом. Коэффициенты К, и К выбрать из условия обеспечения динамических характеристик при малых отклонениях, т.е. в соответствии с теорией линейных систем автоматического управления без учета ограничений величины максимально управляющего воздействия. А коэффициент К выбрать по формуле
Кз
- Р.ЗК.ХЭ - К2-л|ХэУмК + Ум/к
ко
ХаУмК
505
40
где XQ - рабочий диапазон изменения рассогласования X.
Формула изобретения
Регулятор с ограничением управляющего воздействия, содержащий последовательно соединенные дифферен- циатор и первый масштабирующий блок второй масштабирующий блок и сумматор, к первому входу которого подключен выход первого масштабного блока, второй вход сумматора соединен с выходом второго масштабного блока, вход которого подключен к входу дифференциатора и к входу регулятора, выходом которого является выход сумматора, отличающийс я тем, что, с целью повьшения качества управления, в него введены блок выделения модуля, умножитель и третий масштабный блок, причем вход блока выделения модуля соединен с выходом дифференциатора, первый вход
умножителя подключен к выходу блока выделения модуля, второй вход - к выходу дифференциатора, а выход умножителя соединен через третий масштабный блок с третьим входом сумматора.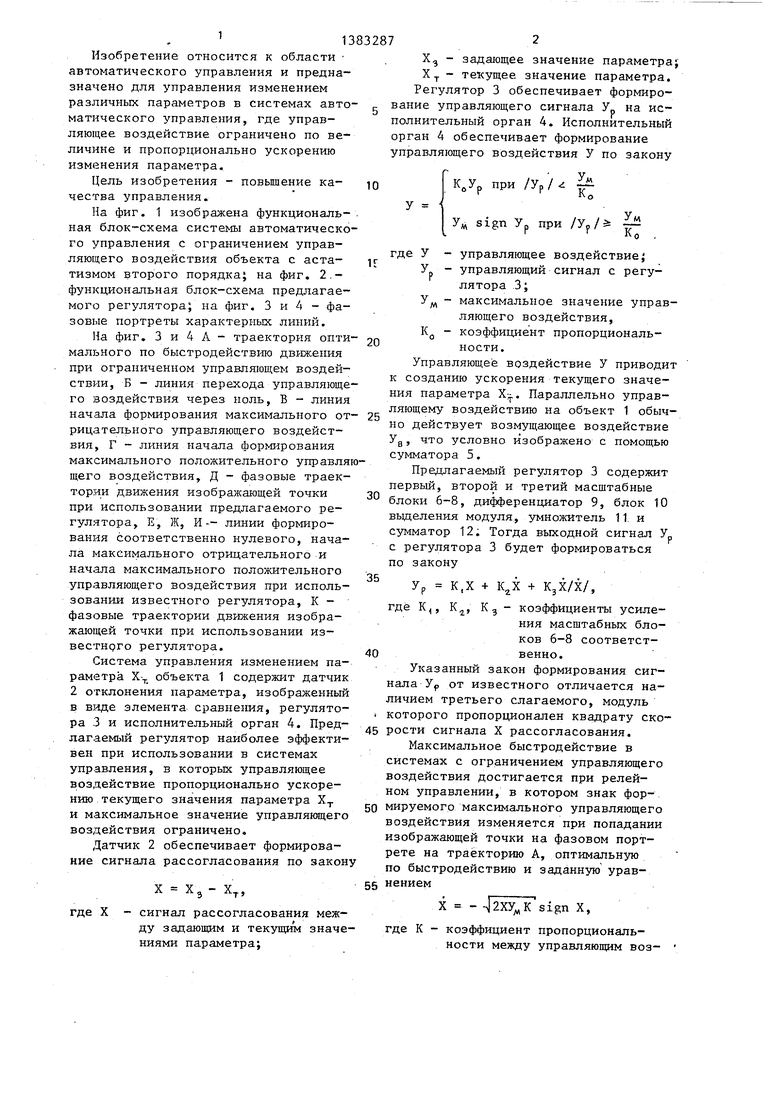
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для оптимального управления объектами второго порядка | 1982 |
|
SU1078404A1 |
| Устройство для автоматического управления | 1980 |
|
SU868699A2 |
| Способ формирования сигнала управления | 1979 |
|
SU857931A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1985 |
|
SU1273877A2 |
| Адаптивный регулятор | 1980 |
|
SU911462A1 |
| Система управления объектом с присоединенным упругодеформируемым элементом | 1986 |
|
SU1403015A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2010 |
|
RU2441265C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| Система управления | 1978 |
|
SU697974A1 |
Изобретение относится к автоматическому управлению и регулированию и может быть использовано в системах с ограниченным управляющим воздействием. Цель изобретения - по- вьшение качества управления - достигается тем, что в регулятор, содержащий последовательно соединенные дифференциатор, первый масштабный блок и сумматор, второй масштабный блок, введены последовательно соединенные блок выделения модуля сигнала, умножитель и третий масштабный блок. Реализуемый с помошд ю регулятора закон управления позволяет приблизить переходный процесс в системе к оптимальному по -быстродействию и уменьшить скоростную составляющую ошибки в установившемся режиме. 4 ил.
Фиг. 2
Фиг.1
§иг.З
Фиг.
| Титце У., Шенк К | |||
| никовая схемотехника | |||
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Жуков Ю.И | |||
| Бртовые вычислительные машины | |||
| - Л.: Судостроение, 1984,с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
