Изобретение относится к робото- технш е, а И1-1енно к конструкции прк:- водов манипуляторов 5 обеспечиваюгдшс перемещение исполнительного органа в пространстве.
Целью изобретения является повышение надежности и увеличение производительности за счет повышения точности позиционирования путем исключения из привода деформируе гь1х элементов
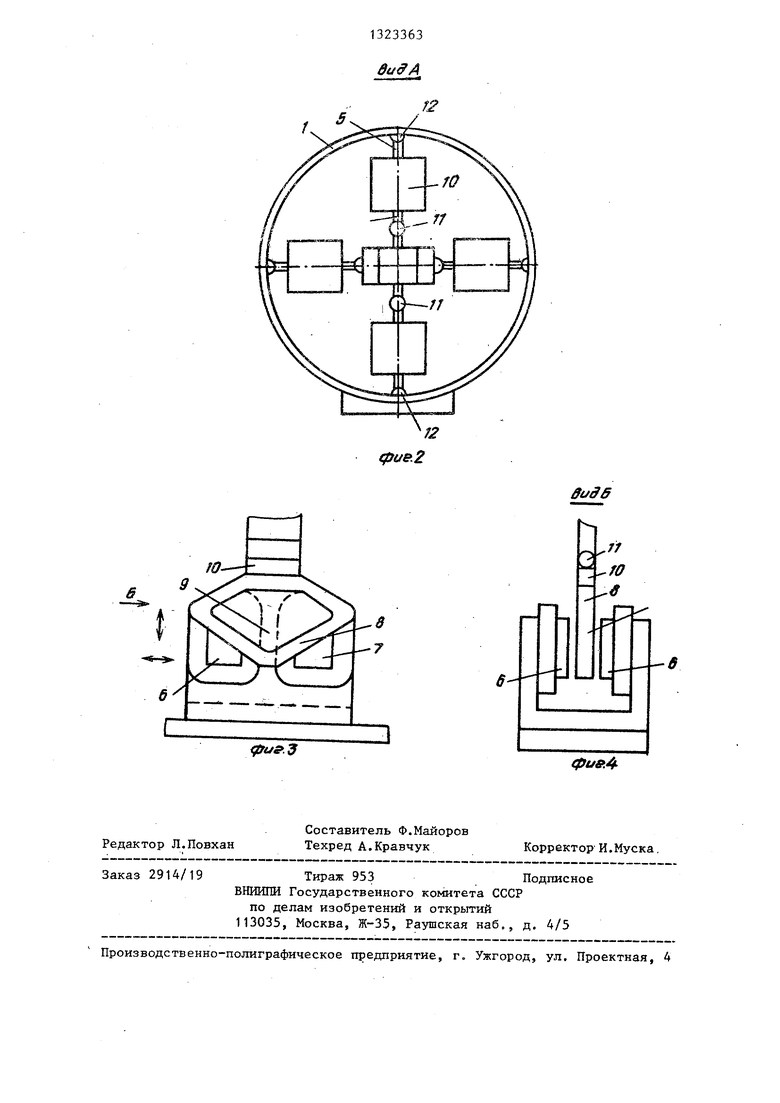
На фиг, 1 изобралсен манищшятор, общий вид, на фиг. 2 - вид А на фиг. 1; на фиг. 3 - обмотка электромагнитного двигателя; на фиг, 4 - вцц Б на фиг. 3.
Предлагаемьш манипулятор содержит установленную в корпусе 1 на пр гдсинной подвеске, включающей пружины 2, руку 3 со схватом 4 и по пей один привод ее перемепдения выполненньш в вцце четырех электромагнитных двигателей 5, расположенных попарно и взаимно перпендикулярно,
Каждьш из двигателей 5 включает в себя два жестко связанных между собой электромагнита 6 и 7, пол-оса каждого из которых, расположены друг против друга, и расположенную мелсг. У полюсами обмотку 8, намотанную иа каркас 9, стороны которого., находящиеся между полюсами электромагнтг- тов, расположены под углом к ос; ; ру ки 3 манипулятора. Обмотка 8 з.г:креплена на штоке 10, который через шарнир 11, обеспечивающий его поворот вокруг оси, параллельной оси руки манипулятора, связан с рукой манипулятора. Электромагниты 6 и 7 каждого двигателя также связаны чере шарнир 12 с корпусом 1,
Преддагаем1Й манипулятор работает следующим образом,
При создании электромагнитами б и 7 магнитных потоков, имеющих согласное направление; на частях обмотки 8, расположенных мелоду полюсами этих электромагнитов при протекании по ней тока, возникают усилия, обеспечивающие, ее перемещение в направлении, перпендикулярном оси ру
ки 3, так как горизонтальные составляющие усилий в этом случае уравновешены. Таким образом, при соответствующем в слючении электромагнитов всех двигателей 5 обеспечивается переме- П1,ение руки 3 в поперечном направлении. Продольное перемещение руки 3 обеспечивается при включении электромагнитов 6 и 7 такш.1 образом, что их потоки имеют встречное направление,
В этом случае на частях обмотки S, расположенных между полюсами этих электромагнитов, появляется неурав5 новеженное усилие, направленное
вдоль оси руки 3, при этом составля- ющсШ усилия, направленная перпендикулярно этой ocHj может быть зфавно- вешена противолежаишм двигателем 5,
0
Формула изобретения
Манипулятор, содержащи1 установленную в корпусе руку со схватами и по крайней мере один привод ее перемещения, выполненный в виде четырех электромагнитньск двигателей, расположенных попарно и взаимно перпендикулярно, каждый из которых включает два жестко связанных между собой электромагнита, полюса которых расположены друг против друга, и электрическую обмотку, расположенную между полюсами электромагнитов и жестко
связанную со штоком, а электромагниты и шток ка;кдого двигателя связаны соответственно с корпусом и с рукой манштулятора с возможностью поворота вокруг осей, параллельных продольной
оси руки манипулятора, отличающийся тем, что, с целью повышения надежности и увеличения производительности за счет повьшения точности позиционирования руки манипулятора, он снабжен пружинной подвеской руки к корпусу, а обмотка каждого электромагнитного двигателя снабжена каркасом, стороны которого, находящиеся между полюсами каждого
из электромагнитов, расположены под углом к оси руки манипу пятора.
dt/ffA
фив.2
виЗб
71
W
б
фи9.д
Редактор Л.Повхан
Составитель Ф.Майоров Техред А.Кравчук
Заказ 2914/19
Тираж 953. Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно
-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор И.Муска.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1269990A1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| Самоустанавливающаяся головка робота | 1984 |
|
SU1274902A1 |
| Манипулятор | 1980 |
|
SU1166877A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Рука манипулятора | 1980 |
|
SU952576A1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
Изобретение относится к робототехнике, а именно к конструкции, приводов манипуляторов, обеспечивающих перемещение исполнительного органа в пространстве. Целью изобретения является повьшение надежности и увеличение производительности за счет точности повышения позиционирования путем исключения из привода деформируемых элементов. Для получения продольного или поперечного перемещения руки 3 со схватом 4 включаются электромагниты электромагнитных двигателей 5 и подается, ток в обмотку, расположенную на каркасе между полюсами этих электромагнитов. За счет того, что части этой обмотки, находящиеся между полюсами электромагнитов, расположены под углом к оси руки 3, в зависимости от направления магнитного потока, создаваемого электромагнитами одного двигателя, к обмотке, связанной шарнирно через штбки 10 с рукой 3, прикладываются усилия, равнодействующая которых имеет продольное или поперечное направление. 4 ил. о е (/)
| Манипулятор | 1984 |
|
SU1269990A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
