. . 1131
Изобретение относится к робототехнике и может быть использовано для механизации и автоматизации основных и вспомогательных операций в различных отраслях машино- и приборостроения.
Целью изобретения является расширение технологических возможностей , за счет увеличения зоны обслуживания манипулятора.
На фиг.1 изображена рука манипулятора в разрезе; на фиг.2 - разрез А-А на фиг.1.
Рука содержит модули 1, установленные последовательно и шарнирно связанные между собой, и схват 2. : Каждый модуль 1 выполнен в виде стального диска, одна сторона которого плоская, а другая - 3 имеет фор- tiy конуса. Модули 1 связаны между собой с помощью шарового шарнира 4, ко- торьй связывает центр плоской поверхности одного модуля 1 с вершиной конусообразной поверхности 3 соседнего модуля 1. В пазах 5 плоской поверхности каждого модуля 1 на одинаковых угловых -расстояниях друг от друга размещены не менее трек обмоток 6 электромагнитов. По периметру клинообразного воздушного зазора 7 между соседними модулями I размещен упругий элемент 8, который может быть выполнен в виде метэластического кольца. Характеристика упругости элемен-. та 8 подбирается так, чтобы создаваемая им противодействующая сила скомпенсировала бы нелинейность статической тяговой характеристики электромагнита. Выполнение этого условия позволяет избежать удар между модулями и тем самым получить плавное по2
зиционирование в пределах рабочего зазора электромагнита.
Рука манипулятора работает следую- пщм образом.
При включении любой обмотки-б мо- ду.ш 1 она создает магнитный поток, обеспечивающий принежение торцовых поверхностей смежных модулей.
Используя систему, состоящую из трех обмоток одного модуля, можно добиться поворота соседнего модуля в любую сторону. Благодаря наличию в воздушном зазоре нелинейного упругого элемента, поворот соседнего модуля можно осуществить плавно и на любой угол в зоне рабочего зазора.
20
Формула изобретения
Рука манипулятора, содерж ащая расположенные последовательно и соединенные шарнирно между собой модули и привод их поворота, включающий установленные в модулях электромагниты, поверхность -полюсов которых расположена в .плоскости одной из торцовых поверхностей модуля, отличаю-. D а я с я тем, что, с целью расширения технологических возможностей за счет увеличения зоны обслуживания, она снабжена упругими элементами, расположен1Сз1ми между смежными модулями по периметру их торцовой поверхности, а модули вьшолнены в виде дисков, одна из торцовых поверхностей каждого из которых имеет форму конуса, а другая, на которой расположены полюсные поверхности по крайней мере
трех электромагнитов, является плоской, при этом смежные модули обращены друг к другу различными по форме торцовыми поверхностями.
А-А
Редактор А.Ворович Заказ 2258/17
Составитель Ф.Майоров Техред Н.Глущенко
Корректор
Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, /К-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 2
Корректор Н.Король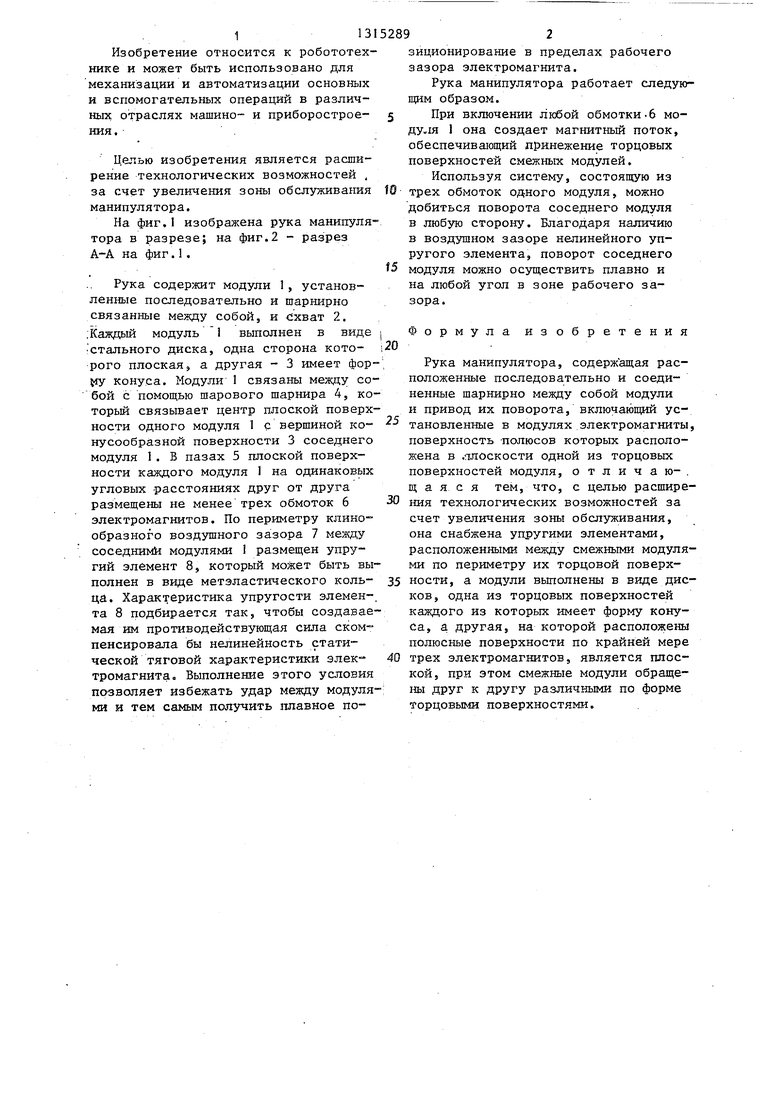
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука /ее варианты/ | 1985 |
|
SU1278210A1 |
| Механическая рука | 1981 |
|
SU1096093A1 |
| Рука робота | 1985 |
|
SU1284819A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Промышленный робот | 1986 |
|
SU1404330A1 |
| СТРУЙНЫЙ ЗАХВАТ | 1995 |
|
RU2090352C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПЕРЕМЕЩЕНИЯ ПРЕДМЕТОВ | 2005 |
|
RU2284897C1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Пневматический схват для плоских деталей | 1984 |
|
SU1181865A2 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
Изобретение относится к робототехнике и может быть использовано для механизации и автоматизации основных и вспомогательных операций в различных отраслях мартино- и приборостроения. Целью изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания манипулятора. Рука содержит последовательно установленные и шар- нирно соединенные между собой модули 1, несущие схват 2, причем каждый из модулей выполнен в виде диска, одна сторона которого плоская, а другая имеет конусообразную поверхность 3, вершина которой с помощью шарового шарнира. 4 связана с центром плоской стороны соседнего модуля 1. В пазах 5, выполненных со стороны плоской поверхности каждого модуля I, размещены по меньшей мере три обмотки 6 электромагнитного привода поворота. Кроме того, по периметру клинообразного кругового воздушного зазора 7 между соседними модулями 1 размещен упругий элемент 8, предназначенный для компенсации нелинейности статической тяговой характеристики электромагнита. 2 ил. с g (Л со СП ю 00 со 
| Механическая рука | 1981 |
|
SU1096093A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
