4:: Is3
оо со
СП
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для управления адаптивным роботом | 1988 |
|
SU1541556A2 |
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
| Устройство для управления адаптивным роботом | 1984 |
|
SU1188700A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Схват манипулятора | 1984 |
|
SU1323376A1 |
| Устройство для установки многовыводных радиоэлементов,преимущественно микросхем,на печатные платы | 1986 |
|
SU1457186A1 |
| Адаптивный схват промышленного робота | 1985 |
|
SU1303403A1 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
Изобретение относится к области робототехники и может быть использовано при автоматизации сборочных процессов с применением роботов, снабженных очувствленны- ми схватами. Цель изобретения - расширение технологических возможностей устройства. Для этого в устройство, содержащее губки схвата с приводом их Сжатия, блок сравнения, блок управления, связанный с приводом перемещения схвата, датчик усилия сжатия, индуктивный датчик проскальзывания с подвижным щтоком, сумматор, введены тактильный датчик, установленный на одной из губок схвата, элемент памяти и инвертор. Устройство позволяет осуществлять дозированное усилие сжатия детали без проскальзывания как при ее захвате, так и при осуществлении операции сборки с запрессовкой за счет соответствующего введения в схему управления сжатием губок схвата сигнала от датчика проскальзывания, которое производится переключением контактов тактильного датчика, взаимодействующего при сборке с сопрягаемой деталью. 3 ил. S (Л
К
Изобретение относится к робототехнике, может быть использовано при созданий сбо- рочньЕХ роботизированных комплексов к является усовершенствованием устоойства по авт. CB. NO 13372ГзО.
Целью изобретения являе;гся расширение технологических возможностей устройства за счет введения-автоматического дозирования усилия сжатия охвата ;3 -и1аулятора при выполнении им сборочной операции, связанной с запрессовкой.
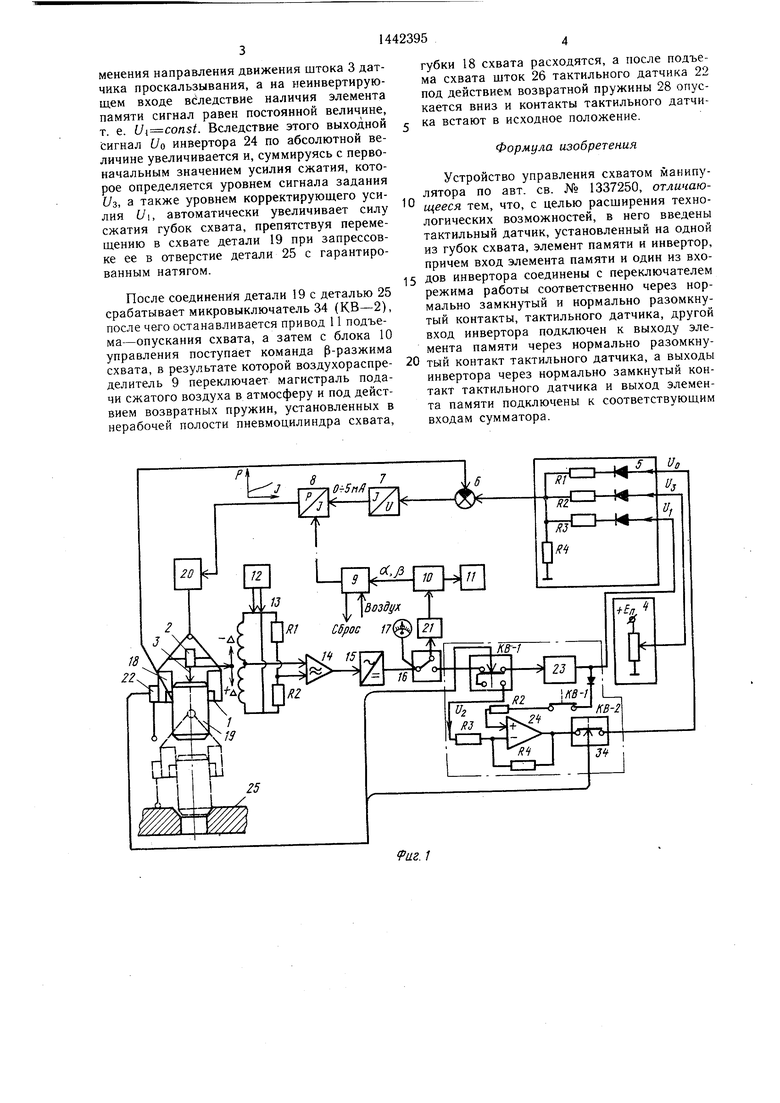
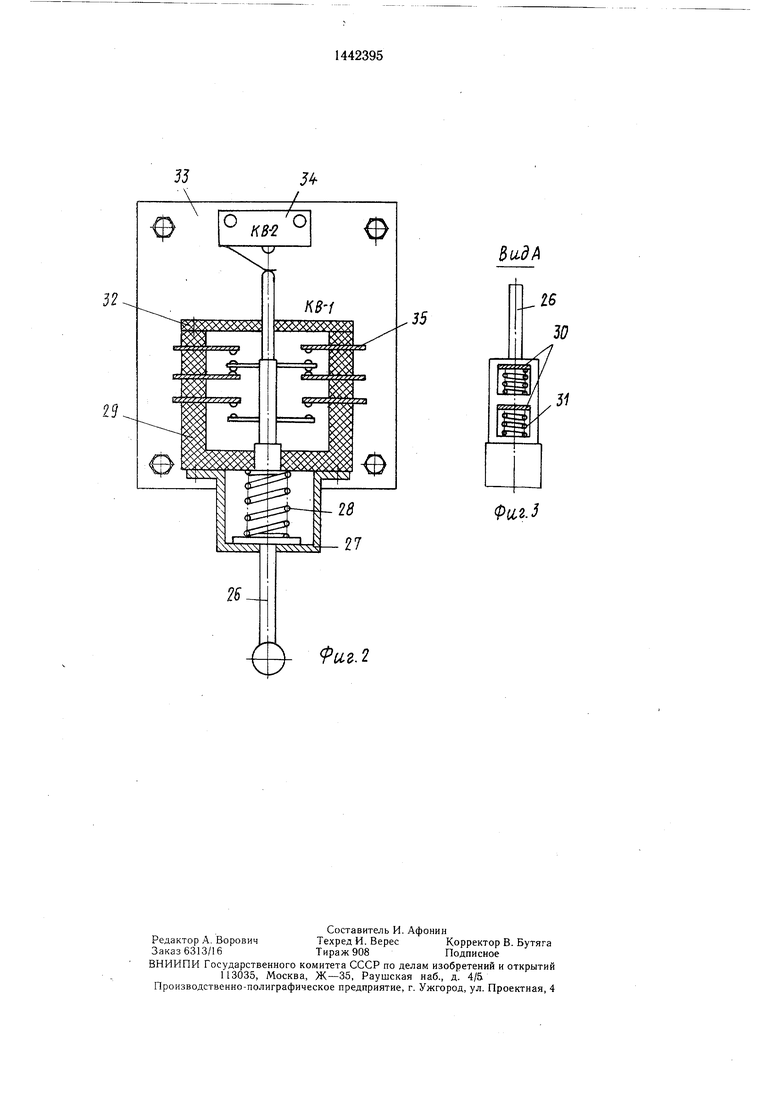
На фиг. 1 представлена функциональная схема ус ройс : Е а; на фиг. 2 - (оиструк- ция тактильного л,а чичо, варич т; на фиг. 3 -- вид А на фиг. 2.
Устройство содержит датчик 1 усилил сжатия, индуктив1и1 й датчик 2 гфсскальзы- вания, нодвижный нгтак 3 датчика . pci-y- лируемый задатчик 4 минимального уровня усилия сжатия, сумматор о., б.пок 6 сравнения, нормкруЮ|Ций ;;реобразовател} (токовый усилитель) 7, н-лектроги- евкштический преобразователь (ЭПП) , йог,.4у);ораспреде- литель 9, б,;юк 10 упраиления, прквоА 11 вертикального перемещения схвзта, генератор 12 переменного сигнала, дифференциально- мостовая схема 13 включения.обмотох датчика проскальзывания, сялите;1Ь ;4. ;леио.ау- лятор 15, переключатель i6 режима работы, индукторный нрибор :;7. г убки 18 cxBa-i a. объект is манинулирова1 й5 (дегаль;-, ги- ев- матический привод 20 сжатия губо; схвата, формирователь 21 дискретных сигналов датчика нроскальзывания, такткльный датчик 22, элемент 23 памяти, инвертои 24, сопрягаемая петаль 25.
l oiiC i pVKH,i( такт;;.1 ьного ,п. i2 состоит из подвижного 26, кD -;:l; -:; ; 27, возвратной нруж.инь 23, KOjirvca 29, ;одвкхс- иых контак 1 ов 30, коп aKTHv ix ripy ;-:Hi; 3i, верхней крьннки 32, оеноззния 33, угикровь;- клк)чате, 1я 34 и негюдг-и/кных контактов 35.
Устройство работает е; еду с;дку образом.
После записи всех точек позиционирования схвата манину,; итора в режиме обхче-. имя иромынгченного в олок памя ги блока 10 управления и поовер е затесанной 1рограммы б;кж ;0 угграллення переводится в автоматический режим и устройство унравле шя схватом л;амнг;улятора вместе с системой ирогра /;мно1 о уггравления про- мьнцле 1пым робо Ог; работает в автомати- чееком режиме. При этом перек иочатель 5 режима работы ставится в соответе вую1Н,ее положение. Схват с разведенными губками sS онуекается к об1 е;чту 19 15 :аиипу. фования так, что последний оказ явается межд- ками. При соприкостовени -; иггока 3 1,ат- чика ироскальзьшания е объекл Ом 19 ;,iai;HiTy- лирования iirrox начинает 110днима ься кверх и liocju; отработки за;ипп;ого нереке1ие:,н-1И блок 10 управления дгег команду фяяоду 1 i вертикальногс; nepeMeij.ciuivj ехватя га иста- HOBKv.
0
0
После включения воздухораспределителя 9 по команде блока 0 на зажим а воздух через ЭПП 8 подается в пневмопривод 20, в результате чего происходит сжатие губок i.o. После соприкосновения губок схвата с объектом 19 манипулирования датчик 1 усилия сжатия, расположенный на внутренней иоверхности губки, подает сигнал в блок 6 сравнения, где он сравнивается с сигналом задания и з, уровень которого определяет минимальный уровень дозированного усилия с;катия для захватываемого предмета. Этот сигнал поступает от регулируемого задатчи- ка 4 минимального уровня усилия сжатия. Разбаланс напряжений ( подается на вход нормирующего преобразователя 7, который преобразует входной сигнал на- гфяжения в унифи л,ированный токовый сигнал и подает его на первый вход ЭПП 8, ;соторый дозирует подачу сжатого воздуха в пневмопривод 20 в соответствии с за- ианньш мини;у1альным уровнем.
После отработки заданного минималь- г;ого усилия сжатия блок управления (согласно записанной программе) дает команду приводу 11 перемеиления схвата на подъем предмета. В процессе выполнения этой ко- мандь; при недостаточности сжимающего усилия захватываемый объект остается на месте или в процессе подъема схвата начинает проскальзывать в губках 18. Шток 3 начинает опускаться и при наличии проскальзывания на выходе ехемы 13 появляется напряжение положительной полярности, которое поступает на вход сумматора 5, где, суммируясь с напря.женкем с/з, увеличивает его и тем самым автоматически и плавно повышает .:1,ог1олнительную дозировку ежи- усилия губок 18.
При достаточном для захватывания усилии объект 19 начинает подниматься вместе ео схватом и шток 3 датчика проскальзывания перестает перемещаться, прекращая увеличивать сигнал дозирования сжимающего усилия. Деталь 19 захвачена и переносится на позицию сборки. После контакта запрессовываемой детали 19 с сопрягаемой деталью 25 в , результате взаимодействия подвижного штока 26 тактильного датчика 22 с сопрягаемой деталью 25 переключаются контакты KB--1 тактильного датчика, В первый момент времени после срабатывания контактов тактильного датчика на входы инвертора 24 поступают одинаковые по величине синфазные сигналы. Сигнал Ui с элемента 23 памяти поступает ка неинвертирующий вход, а сигнал Uz через замкнутый контакт - на инвертируюший вход. Зследствие этого на выходе инвертора 24 в первый момент имеется нулевой сигнал. В процессе выполнения схватом манипулятора сборочной операции сигнал на инвертирую- ;i,evi инвертора 24 при проскальзывании детали 9 в губках схвата по абсолютной величине уменьшается вследствие изменения направления движения штока 3 датчика проскальзывания, а на неинвертирую- щем входе вследствие наличия элемента памяти сигнал равен постоянной величине, т. е. U{ const. Вследствие этого выходной сигнал (/о инвертора 24 по абсолютной величине увеличивается и, суммируясь с первоначальным значением усилия сжатия, которое определяется уровнем сигнала задания (Уз, а также уровнем корректирующего усилия t/i, автоматически увеличивает силу сжатия губок охвата, препятствуя перемещению в схвате детали 19 при запрессовке ее в отверстие детали 25 с гарантированным натягом.
После соединения детали 19 с деталью 25 срабатывает микровыключатель 34 (KB-2), после чето останавливается привод 11 подъема-опускания схвата, а затем с блока 10 управления поступает команда р-разжима
губки 18 схвата расходятся, а после подъема схвата шток 26 тактильного датчика 22 под действием возвратной пружины 28 опускается вниз и контакты тактильного датчика встают в исходное положение.
Формула изобретения
Устройство управления схватом манипулятора по авт. св. № 1337250, отличающееся тем, что, с целью расщирения технологических возможностей, в него введены тактильный датчик, установленный на одной из губок схвата, элемент памяти и инвертор, причем вход элемента памяти и один из вхо- 15 дов инвертора соединены с переключателем режима работы соответственно через нормально замкнутый и нормально разомкнутый контакты, тактильного датчика, другой вход инвертора подключен к выходу элемента памяти через нормально разомкну10
схвата, в результате которой воздухораспре-20 тый контакт тактильного датчика, а выходы делитель 9 переключает магистраль пода-инвертора через нормально замкнутый кончи сжатого воздуха в атмосферу и под деист-такт тактильного датчика и выход элемен- вием возвратных пружин, установленных вта памяти подключены к соответствующим нерабочей полости пневмоцилиндра схвата,входам сумматора.
Р
Kf Сброс /709 К 14 15
I Bo3dt/J(
губки 18 схвата расходятся, а после подъема схвата шток 26 тактильного датчика 22 под действием возвратной пружины 28 опускается вниз и контакты тактильного датчика встают в исходное положение.
Формула изобретения
Устройство управления схватом манипулятора по авт. св. № 1337250, отличающееся тем, что, с целью расщирения технологических возможностей, в него введены тактильный датчик, установленный на одной из губок схвата, элемент памяти и инвертор, причем вход элемента памяти и один из вхо- 5 дов инвертора соединены с переключателем режима работы соответственно через нормально замкнутый и нормально разомкнутый контакты, тактильного датчика, другой вход инвертора подключен к выходу элемента памяти через нормально разомкну0
0 тый контакт тактильного датчика, а выходы инвертора через нормально замкнутый контакт тактильного датчика и выход элемен- та памяти подключены к соответствующим входам сумматора.
ос /709 К 15
I Bo3dt/J(
IS
ue.2
u,df(
iB
1/
w
J.
/
31
ФЦ2.3
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
