Изобретение относится к строительству и может быть использовано для автоматического управления устройствами для укладки бетонной смеси, сыпучих материалов и т.п.
Известен способ автоматического управления устройством для укладки бетонной смеси, заключающийся в поддержанин требуемого отношения интенсивности подачи бетонной смеси к скорости движения питания регулированнем скорости электропривода шнекового питателя с учетом, скорости перемещения тележки с формой, скорости движения ленты горизонтального конвейера, принимающего бетонную смесь от шнекового питателя, а также степени заполнения расходного бункера П1.
Недостаток этого способа заключается в том, что он может быть использован только для устройств формования длинномерных изделий простой конфигурации расположенных на движущейся тележке.
Кроме того, способ характеризуется точност1 ю укладки, так как регулирование производится не по фактическому заполнению формы.
Наиболее близким к предлагаемому является способ автоматического управления укладкой бетонной смеси и сыпучих материалов, включающий стабилизацию требуемого отношения интенсивности подачи бетонной смеси к скорости движения питателя путем изменения скорости движения питателя 2.
Недостатки этого способа - невысокие точность и быстродействие регулирования, так как не производится корректировка скорости движения в зависимости от рассогласования по весу бетонной смеси, фактически уложенной, в форму, и интенсивности подачи в зависимости от рассогласования по скорости.
Кроме того невозможно уложить бетонную смесь в форму сложной конфигурации или формование многослойных изделий (формы, панели с оконными или дверными проемами и т.п.), так как для этого необходимо сложное движение питателя относительно формы и регулирование скорости движения питателя в функции рассогласования при одновременном поддержании требуемого отношения интенсивности подачи смеси к скорости движения.
Цель изобретения - повышение точности уравления.
Эта цель достигается тем, что согласно способу автоматического управления укладкой бетонной смеси и сыпучих материалов, включающему стабилизацию требуемого отношения интенсивности подачи бетонной смеси к скорости движения питателя путем изменения скрости движения питателя, измеряют фактическую массу бетонной смеси в форме и фактический путь перемещегия питателя, изменяют скорость подачи бетонной смеси и корректируют скорость движения питателя, причем 5 изменение скорости подачи бетонной смеси осуществляют по формуле
(45)-4V , а коррекцию скорости движения питателя
осуществляют по формуле
V.i-fop р К dt Ф pacMJ
5. гдеK F(S) ;
S - плотность бетонной смеси; F(S) - поперечное сечение формы; РФ - фактическая масса бетонной сыеси
в форме; Ррасч - расчетная масса бетонной смеси;
V(iis) - задаваемая скорость движения питателя как функция разности между заданным и фактическим путем перемещения питателя 35 ;
дМ - разность между заданной и фактической скоростями движения питателя. Способ осуществляется следующим образом. Масса бетонной смеси, поступившая в форму за время i может быть представлена в
:.,
где и - интенсивUc3t
ф
виде
ность подачи бетонной смеси (расход).
Требуемая масса смеси для заполнения форivQii может быть представлена 8 виде
Ppac - V y F(50-rSpf5}d5 .
Условия точности процесса укладки смеси по сечению формы является равенство
и
.(Рр«с.) ж( (1Таким образом, задачей управления при 45 заранее заданных траектории перемещения
(S I (-fc) , плотности (-jr) и коэффициенте K-yF(S} является обеспечение равенства при максимальном быстродействии за счет взаимосвязаной работы привода подачи бе50 тонной смеси и приводов перемещения питателя.
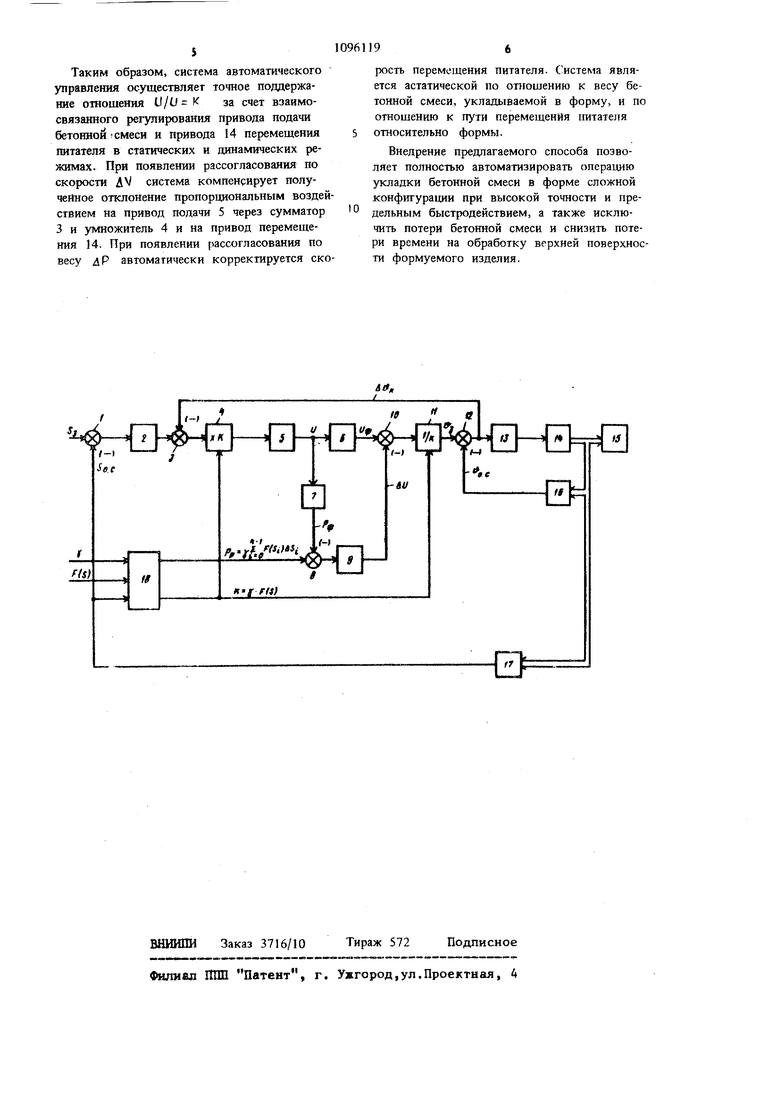
Узел подачи бетонной смеси в начале прюцесса описывается запаздывающим звеном (время задержхси - случайная величина, зависимая от начального состояния бетоновода и скорости перемещения смеси), могут иметь место также разрывы непрерывности лрдачи смеси, поэтому в качестве задающего канала следует использовать канал управления при3водом узла подачи бетонной смеси и формировать управляющее воздействие на привод перемещения питателя в функции интенсивности подачи бетонной смеси и коэффициента К в виде Uj ифц /К . Для точного позиционирования питателя относительно формы в режимах разгон, торможение скорость перемещения питателя должна изменяться с постоянным ускорением, т.е. + Ei Путь и скорость при -cori5-t связаны завнсимостью 5 v2/26 , откуда V VSne-K V5 Привод узла подачи при 5р :45,Л52.5.-( пройденный путь;лб - рассогласование по пути; SP , 5.Г - соответственно путь разгона, торможения) находится в режиме насыщения, т.е. работает с максимальной производительностью. При изменении скачком Vj вследствие механической инерцни скорость перемещения питателя скачком измениться не может и по условию оптимальной работы механизма должна изменяться по линейному закону с постоянным ускорением. Аоп Ошибка по скоросги /jV V j. ( Vpj. - скорость обратной связи, измеряемая датчиком скорости) приводит к накоплению рассогласования по весу ЛР Ррасч Рф.где Рф - фактическая (измеренная) величина веса бетонной смеси, уложенной в форму. Астатизм системы по отношению к задаваемой величине веса Ррасч может быть обеспечен введением коррекции скорости перемещения питателя в функции рассогласования по весу. Легко показать, что (РрасчРф) откуя,а для получения астатизма по весу необходимо скорректировать скорость на величину - 3ldi: х(Р . Таким образом, управляющее воздействие на привод перемещения питателя (.C4)В переходных режимах при изменении Vj скачком корректировка скорости не призедет к соблюдению условия U/V К что влечет за собой неравномерность укладки смеси по сечению формы. В переходных режимах условие U/V-К можно обеспечить введением обратной связи по рассогласованию ДМ в канал управления приводом узла подачи бетонной смеси. Скорость перемещения питателя в режимах разгон, торможение должна иметь вид . Фактическая величина узла подачи смеси является задающей, позтому на привод подачи смеси следу ет формировать управляющее воздействие (й5) . Учитывая условие U/V k и вводя обратную связь по скоростной оши& I ке, получим (А51 -4V. 9Л На чертеже изображена структурная схема системы управления бетоноукладчиком, позволяющая реализовать предлагаемый способ. Система управления содержит сумматор 1, регулятор 2, сумматор 3, умножитель 4, привод 5 узла подачи бетонной смеси, датчик 6 расхода бетонной смеси, весовое усгройство 7, сумматор 8, диффереяцирующей злемент 9, сумматор 10, делитель II, сумматор 12, регулятор 13, привод 14 перемещения питателя, питатель 15, датчик 16 скорости, 17 перемещения, вычислительный блок 18, определяющий требуемую величину массы етонной смеси в зависимости от поперечного сечения формы нли части ее, плотиости беонной смеси и положения питателя относительп-( 50 формы ((50 н коэффициент К, зависимый от поперечноп сечения формы и плотности бетонной смеси. На сумматор 1 задается величина перемещения питателя 5ц , а на вышслительный блок 18 - величина плотности бетоклой смеси у и зависимость поперечного сечения F(Si) формы или ее части от пути. Сумматор 1 производит определение рассогласования d5 |5j-Sj,j , где Sc, фактическое положение питателя, определяемое датчиком перемещения 17. Регулятор положения 2 вьщает на сумматор 3 сигнал скорости перемещения питателя в функции рассогласования V V ( 5 , который производит операцию V(A5)-лV V. Умножитель 4 прюизводит умножение сигнала U на коэффициент К, определяемый вычислительным блоком 18. Сигнал с выхода ултожителя 4 и, К (л5)- Д V. подается на привод 5 узла подачн бетонной смеси. Датчик интенсивности (расхода) 6 бетонной смеси выдает сигнал и на сумматор 10. Весовое устройство 7 определяет фактическую массу бетонной смеси Рф в форме, которая сравнивается в сумматоре 8 с расчетной массой, определяемой вычислительным блоком 18. Сигнал разностн Д Р Ррасч ф выхода сумматора 8 дифференцируется элементом 9, т.е. определяется величина &U . Сумматор 10 определяет величину и , которая умножается на величину 1/К делителем. Сигнал (иф-4 и ) /К на выходе делителя 11 равен требуемой скорчкти перемещения питателя 15. В сумматоре 12 скорость задания сравнивается с фактической скоростью питателя, выдаваемой датчиком скорости 16, а полученный сигнал рассогласования Л rV,-V-jg подается на регулятор скорости 13 привода 14 перемещения питателя и на сумматор 3.
Таким образом, система автоматического управления осуществляет точное поддержание отношения и/и К за счет взаимосвязанного регулирования привода подачи бетонной смеси и привода 14 перемещения питателя в статических и динамических режимах. При появлении рассогласования по скорости AV система компенсирует полученное отклонение пропорщюнальным воздействием на привод подачи 5 через сумматор 3 и умножитель 4 и на привод перемещения 14. При появлении рассогласования по весу 4Р автоматически корректируется скорость перемещения питателя. Система является астатической по отношению к весу бетонной смеси, укладываемой в форму, и по отнощению к пути перемещения 1штателя относительно формы.
Внедрение предлагаемого способа позволяет полностью автоматизировать операцию укладки бетонной смеси в форме сложной конфигуращ1И при высокой точности и предельным быстродействием, а также исключить потери бетонной смеси и снизить потери времени на обработку верхней поверхности формуемого изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического регулирования формованием трубчатых строительных конструкций центрифугированием | 1984 |
|
SU1220802A1 |
| Способ дозирования компонентов агломерационной шихты | 1984 |
|
SU1206625A1 |
| Способ управления процессом распределения рафинадной кашки по прессам | 1986 |
|
SU1423589A1 |
| Способ укладки и уплотнения фибробетонной смеси в опалубку и устройство для его осуществления | 1991 |
|
SU1838550A3 |
| АВТОМАТИЧЕСКИЙ ДОЗАТОР | 1972 |
|
SU336527A1 |
| Весовой дозатор непрерывного действия | 1979 |
|
SU792082A1 |
| Способ управления поперечной подачей внутришлифовального станка | 1976 |
|
SU647102A1 |
| Тренажер для подготовки яхтсменов | 1987 |
|
SU1515184A1 |
| Установка для формования трубчатыхиздЕлий | 1979 |
|
SU806427A1 |
| Система автоматического управления процессом бурения | 1987 |
|
SU1479632A1 |
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УКЛАДКОЙ БЕТОННОЙ СМЕСИ И СЫПУЧИХ МАТЕРИАЛОВ, включающий стабилизацию требуемого отношения интенсивности подачи бетонной смеси к скорости движения питателя путем изменения скорости движения питателя, отличающийс я тем, что, с целью повышения точности управления, измеряют фактическую массу бетонной смеси в форме и фактический путь перемещения питателя, изменяют скорость подачи бетонной смеси и корректируют скорость движения питателя, причем изменение скорости подачи бетонной смеси осуществляют по формуле U,(A5)-flVj , а коррекцию скорости движения питателя осуществляют по формуле V Z- 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Двухступенное или многоступенное гидравлическое инжекционное устройство для сжатия воздуха и других газов, с применением насосов для постоянного поддержания циркуляции в нем жидкости | 1925 |
|
SU1955A1 |
