со
05 СО
--J
Изобретение относится к подъемнотранспортным устройствам, а именно к подъемным столам с грузовой платформой.
Известны подъемные устройства, содержащие грузовую платформу и ВИНТОВОЙ механизм подъема грузовой платформы С1 3.
Однако в известных устройствах груз, который необходимо поднимать, располагается на открытой платформе, что исключает расформирование паке тов штучных грузов методом послойной ; разгрузки ввиду возможности развала пакета из-за наличия сил трения между рядами груза.
Известно устройство для поштучной разборки стопы слябов, содержащее основание с подъемным механизмом, предназначенное для размещения и подъема стопы, стЭлкиватель и приемный рольганг t2. ,
Недостатком данного устройства является то, что основание не обеспечивает послойной разгрузки стапкивателем пакета штучных грузов, располагаемого на основании, так как последнее не имеет приспособлений для удержания пакета от разрушения.
Наиболее близким к предложенному является подъемный стод, содержащий опорную раму, грузовую платформу со стержнями, взаимодействующими с направляющими втулками, установленными на опорной раме, и винтовой, механизм подъема грузовой платформы ГЗ .
Недостатками известного подъемного стола являются его непригодность для послойной разгрузки пакетов штучных грузов сталкиванием, ввиду воз- можности развала пакета и отсутствия приспособлений для дозирования толщины каждого сталкиваемого слоя.
Кроме того, подъемный стол со скользящими во втулках стержнями плохо приспособлен для восприятия значительных боковьпс нагрузок, возникающих при разгрузке пакетов сталкиванием. Э.то сужает технологические ; ВОЗМОЖНОСТИ известного подъемного стола.
Цель изобретения - повьпиение технологических возможностей подъемного стола путем обеспечения послойной разгрузки пакетов штучных грузов сталкиванием.
Поставленная цель достигается тем, что в подъемном столе, содержащем опорную раму, грузовую платформу со стержнями, взаимодействующими с направляющими втулками, установленными на опорной раме, и винтовой механизм подъема грузовой платформы, опорная рама стола снабжена охватывающим грузовую платформу коробом с установленным на его стенке по всей высоте регулируемым упором, а грузовая
платформа - опорным элементом, взаимодействующим с указанным упором.
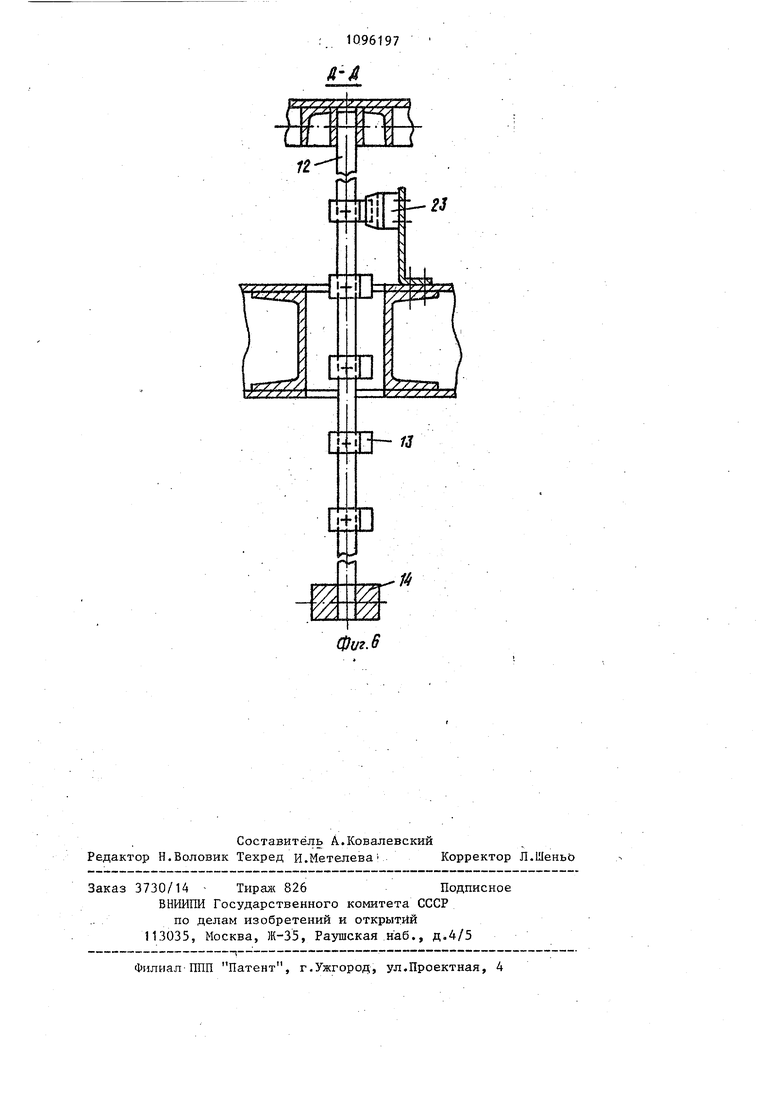
На фиг.1 изображен подъемный стол; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг,2 на фиг.4разрез В-В на фиг.2 на фиг.З - разрез Г-Г на фиг.1-, на фиг.6 - разрез Д-Д на фиг.1.
Подъемный стол содержит опорную раму 15 грузовую платформу 2 со стержнями 3, взаимодействующими с направляющими втулками 4, винтовой механизм подъема с грузовым винтом 5, охватывающий грузовую платформу короб 6 с установленным на нем регулируемым
упором 7 и упорный элемент 8.
Для подъема (опускания) грузовой платформы грузовой винт 5 сопряжен с приводной гайкой, которая совмещена с червячным колесом редуктора 9, закрепленного на опорной раме 1 подъемного стола. Редуктор 9, ременная передача 10 и двигатель 11 образуют привод подъемного стола.
Для обеспечения автоматической работы стола по заданной программе на штанге 12 закреплены с возможностью перестановки флажки 13.
Нижние концы стержней 2 и штанги 12 соединены траверсой 14. Регулируемый упор 7 в нижней своей части имеет проушину для соединения с кронштейном 15,вьтолненным в виде двух параллельных проушин. Соединение упора 7 с кронштейном 15 осуществляется осью 16. Кронштейн 15 жестко прикреплен к нижней части короба 6. Благодаря такой конструкции крепления упора 7 к коробу 6, упор имеет возможность поворота в вертикальной плоскости относительно оси 16, что обеспечивает установку рабочей плоскости упора 7 параллельно стержням 2. Установка упора 7 в указанное положение производится путем попеременного вращения регулировочных винтов 17 и 18. Винты 19 служат для фиксации упора 7 в нужном положнии . К нижней частр грузовой платформы 2жестко прикреплен кронштейн 20, выполненный в виде двух проушин. В нем посредством оси 21 установлен опорный элемент, предназначенньй для взаимодействия с упором 7 в пределах хода грузовой платформы и вьтолненный в виде упорного ролика 8. Флажки 13 предназначены для взаимодействия с путевым выключателем привода стола. Количество флажков 13 на штанге 12 равно.количеству рядов груза.в расформируемом пакете, например металлических чушек 22, а шаг расположения флажков равен высоте сдвигаемого слоя. В процессе подъема или опускания платформы флажки 13 поочередно воздействуют на путевой выключатель 23, управляя подъемом грузовой платформы 2 по заданной программе. Подъемньш стол работает следующим образом. На грузовую платформу 2, предварительно установленную на нужную высоту, грузоподъемным устройством (не показано) устанавливают пакет литейных чушек 22. При этом опорные поверхности сдвигаемого ряда чушек располагаются на уровне (или несколько вьш1е) верхнего торца стенок короба 6 (фиг.1). Включается сталкиватель, действующий в горизонтальной плоскости, перпендикулярной плоскости чертежа (фиг.1), в результате чего верхний ряд чушек- 22 сталкивается, (остается на грузовой платформе) а следующий ряд, благодаря наличию короба 6, упираясь в стенку последнего, остается, на грузовой платформе. После этого грузовая платформа 2 поднимается вверх до тех пор, пока очередной флажок 13, воздействуя на путевой выключатель 23, не остановит прицод стола При этом последующий ряд чушек занимает положение ранее сброшенного ряа. . Новое включение сталкивателя приводит к разгрузке следующего ряда чушек 22. Этот процесс повторяется до полного расформирования пакета. В момент сталкивания груза сталкиватель оказывает на пакет значительное боковое воздействиеi которое из-за наличия сил трения между рядами груза и платформой передается последней в виде изгибающего усилия на стержни 3 и грузовой винт 5. Однако поскольку грузовая платформа посредством упорного ролика 8 посто янно контактирует с жестким упором 7, закрепленным на коробе 6, то изгибаюнше усилия через упор 7 воспринимаются коробом 6 и соединенной с ним опорной рамой 1. В этих условиях стержни 3 и грузовой винт 5 не подвергаются воздействию изгибающего момента, возникающего как следствие бокового усилия от сталкивания груза. Программа ступенчатых перемещений грузовой платформы задается соответ- ствующим взаиморасположением флажкой 13 на штанге 12. Это обеспечивает перенастройку работы подъемного стола в платформы 2 по числу и величину ступеней, причем в пределах хода платформы.2 может быть запрограммировано несколько различных по величине ступеней или бесступенчатое перемещение : платформы. Предлагаемое изобретение позволяет повысить технологические возможности подъемного стола и использовать его в тяжелых условиях эксплуатации.
Фиг.1 Фиг. Фиг.5
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия загрузки плавильных печей | 1983 |
|
SU1216611A1 |
| Пакеторазборная машина для штучных грузов | 1972 |
|
SU474479A1 |
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
| Устройство для укладки в пакет чушек | 1984 |
|
SU1207948A1 |
| Пакеторазборная машина для штучных грузов | 1979 |
|
SU889575A1 |
| Устройство для разборки пакетов штучных грузов | 1975 |
|
SU590221A1 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU611834A2 |
| Автоматическая линия для разгрузки бетонных элементов на поддонах из сушильных вагонеток | 1982 |
|
SU1115906A1 |
| Тележка для перевозки штучных грузов | 1975 |
|
SU550309A1 |
| Устройство для укладки в пакет изделий | 1985 |
|
SU1298164A1 |


ПОДЪЕМНЫЙ СТОЛ, содержащий опорную раму, грузовую платформу со стержнями, взаимодействующими с направляющими втулками, установленными на опорной раме, и винтовой механизм подъема грузовой платформы, отличающийся тем, что, с целью повышения технологических возможностей стола путем обеспечения послойной разгрузки пакетов штучных грузов сталкиванием, опорная рама стола снабжена охватывающим грузовую платформу коробом с. установленным на его стенке по всей высоте регулируемым упором, а грузовая платформа - опорi ным элементом, взаимодействующим с указанным упором. (Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механическое оборудование широкополосных станов горячей прокатки | |||
| М., Металлургия, 1969, с.66, рис | |||
| Пишущая машина | 1922 |
|
SU37A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| тотип). | |||
