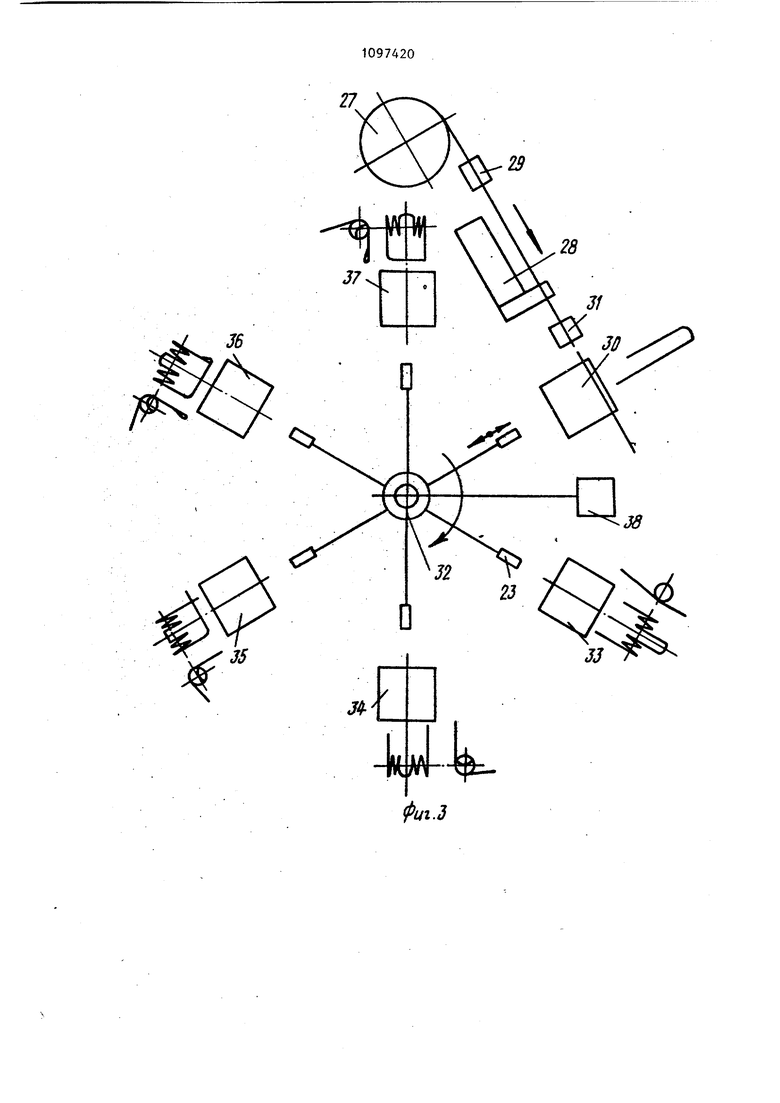
Изобретение относится к обработке металлов давлением, в частности к оборудованию для изготовления пружин из проволоки. По основному авт. св. № 424644 и вестио устройство для навивки пружин с двумя ветвями противоположного направления ll, Однако это устройство характеризуется ограниченными технологическими возможностями. Цель изобретения - расширение технологических возможностей. Указанная цель достигается тем, что устройство для навивки пру жин с двумя ветвями противоположного направления снабжено дополнитель ным Механизмом подгибки крайних вит ков пружины в радиальном направлени размещенным между механизмом навивки пружины и механизмом гибки концо пружины и содержащим смонтированную на станине стойку, шарнирно установ ленный на стойке двуплечий рычаг с контактными роликами, неподвижно за репленные на стойке направляющие втулки и пуансон, снабженный шарнир но закрепленным на нем подпружиненным рычагом для фиксации внутренних крайних витков пружины, приводные толкатели, размещенные в направляющих втулках, один из которых имеет регулировочный конус, и подпружинен ную каретку, имеющую дополнительный толкатель, кронштейны для взаимоДействия с приводными толкателями шарнирно установленный на ней двуплечий рычаг, одно плечо которого снабжено матрицей, а другое имеет канал для прохода дополнительного толкателя и установлено с возможностью взаимодействия с одним из ро ликов двуплечего рьтага стойки, другой ролик которого контактирует с регулировочным конусом приводного толкателя. На фиг. 1 изображен дополнительный механизм подгибки крайних витко пружины в радиальном направлении; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - принципиальная схема устройства для навивки пружин с дву мя ветвями противоположного направления, на фиг. 4 - готовая пружина, на фиг. 5 - то же, вид сбоку. Дополнительный механизм подгибки крайних витков пружины в радиальном направлении состоит из неподвиж но закрепленной стойки 1, имеющей вертикальные направляющие, по которым перемещается каретка 2. В верхней части каретки 2 на оси закреплен качающийся двуплечий рычаг 3, на правом конце которого размещена матрица 4. В верхней части стойки 1 закреплен неподвижный пуансон 5 и подпружиненный качающийся рычаг 6 для фиксации внутренних крайних витков пружины. Толкатель 7, размещенный в направляющей втулке 8, верхним регулируемым концом упирдется в кронштейн 9, закрепленный на каретке 2, нижний конец толкателя снабжен роликом 10. Возвратные пружины 11 закреплены нижними концами за основание стойки 1, а верхними - за выступающие . КОНЦЫ оси рычаг 3. Приводной толкатель 1,2 размещен в направляющих втулках 13 и 14, нижний конец его также снабжен роликом 10, а верхний, регулируемый конец, имеет регулировочный конус 15, опираюпщйся на контактный ролик 16 шарнирно закрепленного на стойке двуплечего рычага 17, второе плечо которого опирается на конец рычага 3. Возвратная пружина 18 приводного толкателя 12 размещена между неподвижным относительно стойки 1 кронштейном 19 и кольцом 20, закрепленным на толкателе. Дополнительный толкатель 21 размещен в сверлении корпуса каретки 2 и снабжен демпфирующей пружиной 22. Устройство содержит захваты 23 для подачи навитых пружин 24 вплотную к пуансону 5, кулачки 25 и 26, бухту 27, устройство 28 подачи проволоки, механизм 29 правки, механизм 30 гибки П-образной петли и зажима поданной проволоки, механизм 31 рубки, поворотный механизм 32, механизм 33 навивки, механизм 34 подгибки крайних витков в радиальном направлении, механизмы 35 и 36 соединения концов в замок, съемник 37 и привод 38, а в рычаге 3 есть канал 39. Устройство работает следующим образом. Захват 23 устройства подает навитую пружину 24 вплотную к пуансону 5, толкатель 7, перемещаясь вверх от кулачка 25, поднимает каретку 2, рычаг 3, опираясь левым концом на ролик рычага 17, поджимает матрицей 4 пружину к пуансону, одновременно дополнительный толкатель 21 через канал 39 поворачивает рычаг 6 и вводит его правый конец в промежуток между внутренними крайними витками пружины 2А. Затем начинает двигаться вверх толкатель 12 - от кулачка 26 и, нажимая регулировочным конусом 15 на ролик 16 двуплечего рычага 17, поворачивает его, а так как второе плечо рычага 17 находится в контакте с левым концом рычага 3, п{)оисуодит дальнейшее сближение матрицы 4 и пуансона 5 и крайние витки пружины 24 подгибаются в радиальном направлении на заданную величину. При дальнейшем вращении кулачков 25 и 26 толкатели 7 и 12 возвращаются в исходное положение под действием.возвратных пружин 11, сдеформированная пружина 24 освобождается и захват 23 переносит ее на следующую операцию. Вся операция происходит за один оборот кулачков 25 и 26, привод которых осуществляется от общего привода 38 устройства.
Проволока из бухты 27 устройством 28 подачи протягивается через механизм 29 правки и подается в механизм 30 гибки П-образной петли. После зажима поданной проволоки в механизме 30 происходит отрубка мерного конца механизмом 31 рубки. При выполнении операции П-образной гибки все остальные механизмы устройства работают вхолостую, поворотный механизм 32 стоит. Затем происходит останов всех механизмов, ввдвижение и захват полученной П-образной заготовки захвата 23 и перенос ее поворотом поворотного механизма 32 к следующему механизму - механизму 33 навивки, где происходит навивка двух ветвей противоположного направления и одновременно происходит гибка новой заготовки в механизме П-образной гибки, так как загрузка его происходит за время переноса первой заготовки во второй механизм.
Далее цикл работы повторяется. Механизм 34 подгибки осуществляет подгибку крайних витков в радиальном направлении, механизмы 35 и 36 соединяют койцы крайних витков обеих ветвей пружины в замок, съемник 37 производит съем готовой пружины с зажимного элемента и сброс ее в тару для готовых изделий.
После последовательной (с начала работы устройства) загрузки всех механизмов (за исключением механизмов подачи 28 и рубки 31) все операции по изготовлению пружины выполняются одновременно в автоматическом цикле за один оборот распределительного вала каждого механизма, имеющих общий привод 38.
Предлагаемое конструктивное выполнение дополнительного механизма, подгибки крайних витков пружины в радиальном направлении существенно расширяет технологические возможности устройства для навивки пружин с двумя ветвями противоположного направления.
5
f7
/
-А

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Устройство для изготовления спиральных трубчатых электронагревателей | 1988 |
|
SU1530311A2 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU534286A1 |
| Автомат для гибки изделий из проволоки | 1989 |
|
SU1641490A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| Автомат для рубки и чеканки штыря линейного разъема из проволоки | 1979 |
|
SU895586A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1990 |
|
SU1731372A1 |
| Устройство для изготовления резьбовых спиральных вставок | 1987 |
|
SU1447503A1 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |


УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН С ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ по авт. св. № 424644, о тли ч ающе е с я тем, что, с целью расширения технологических возможностей, оно снабжено дополнительным механизмом подгибки крайних витков пружины в радиальном направлении, размещенным между механизмом навивки пружины и механизмом гибки концов пружины и содержавшим смонтированную на станине стойку, ш.арнирно установленный на стойке двуплечий рычаг с контактными роликами, неподвижно закрепленные на стойке направляющие втулки и пуансон, снабженный шарнирно закрепленным на нем подпружиненным рычагом для фиксации внутренних крайних витков пружины, приводные толкатели, размещенные в направляющих втулках, один из которых имеет регулировочный конус, и подпружиненную каретку, имеющую дополнительньй толкатель, кронщтейны для взаимодействия с приводными толкателями, шарнирно установленный на ней двуплечий рычаг, одно плечо которого снабжено матрицей, а другое имеет канал для прохода дополнительного толкателя (Л и установлено с возможностью взаимодействия с одним из роликов двуплечего рычага стойки, другой ролик которого контактирует с регулировочс с ным конусом приводного толкателя. со 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ НАВИВКИ ПРУЖИН с ДВУМЯ ВЕТВЯМИ ПРОТИВОПОЛОЖНОГО НАПРАВЛЕНИЯ | 1971 |
|
SU424644A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
