Я
X
49
(Л
taa&
О ND 01 ГчЭ ЬО
.
11А0
Изобретение относится к промытлен- ному транспорту, а имел1Е1о к внутрицеховому транспорту, н может быть использовано в гибких автоматизированных линиях.
Пепь изобретения расширение функциональных возможностей и повышение эффективности.
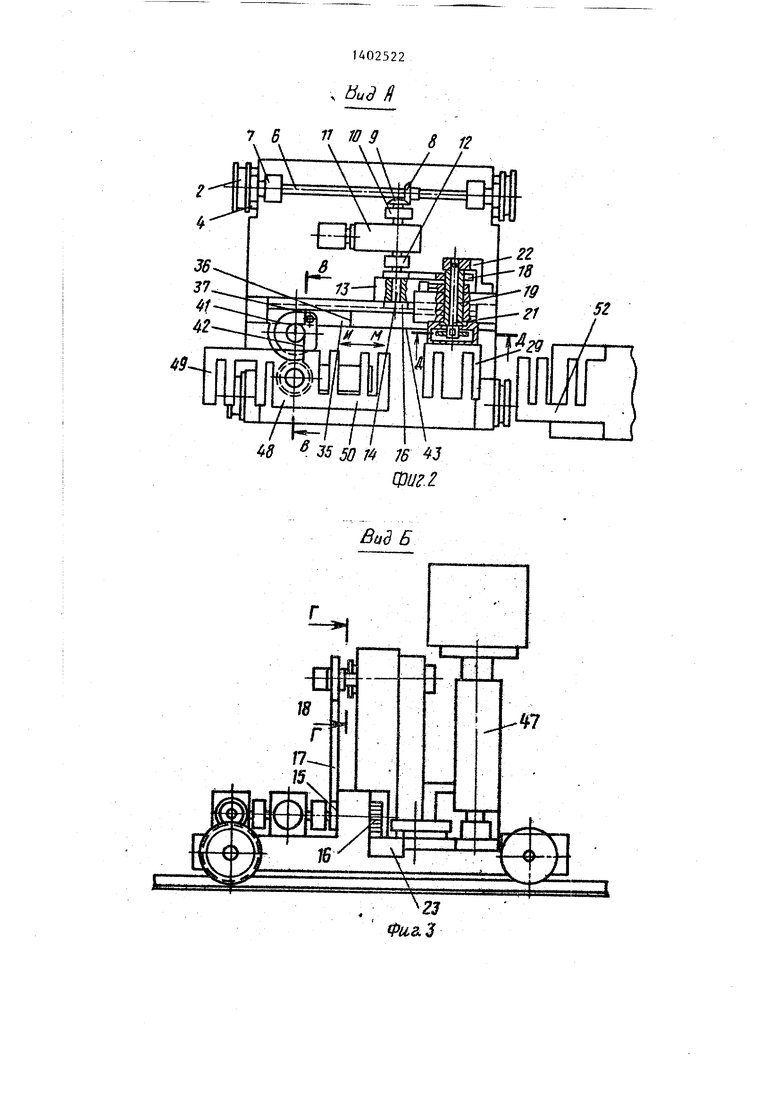
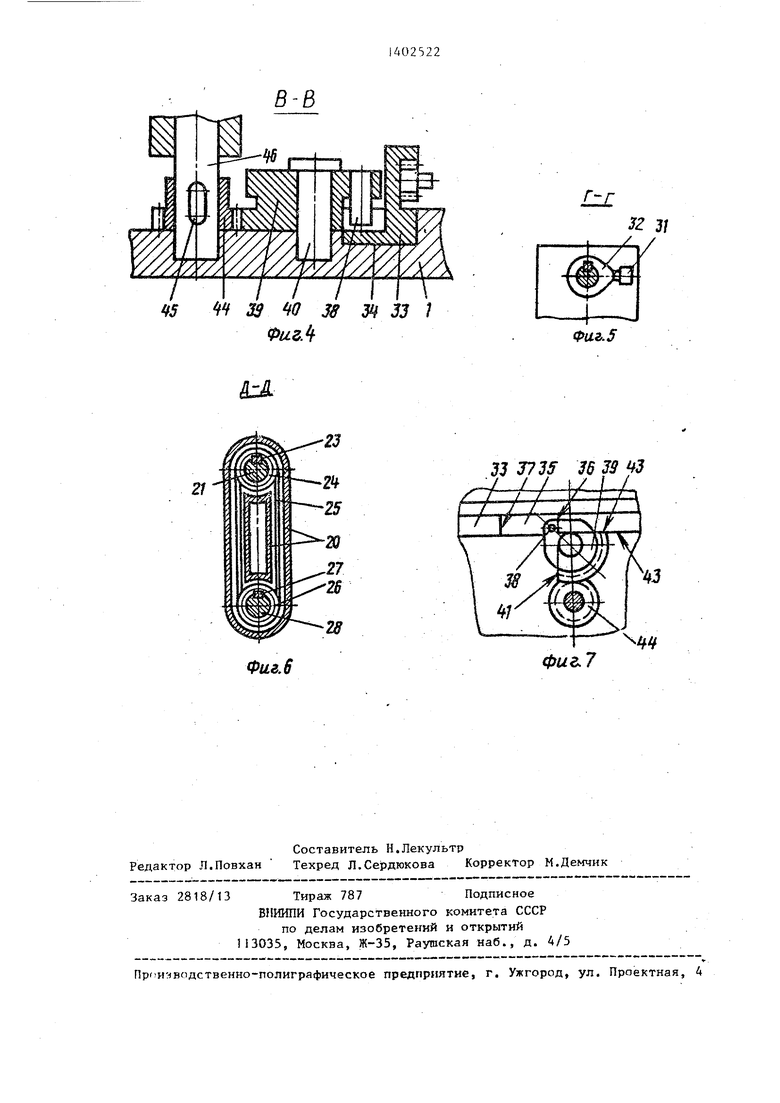
На фиг, 1 изображено устройство, вид спереди; на фиг. 2 - вид А на фиг. 1; на фиг, 3 - вид Б на фиг.1; на фиг. 4 - сечение В-В на фиг.2; на фиг, 5 - сечение Г-Г на фиг. 3; на фиг,6 - сечение Д-Д на фиг.2 (повер- нуто); на фиг.7 - упоры с пальцем.
Перегрузочное устройство содержит ходовую опору 1 с четырьмя колесами 2 Д.ПЯ перемеш,ения по рельсам-3, из которых два колеса связаны с шестер- нями 4, зацепленными с шестернями. 5 вала 6, Последний установлен с возможностью вращения в опорах 7 и снабжен закрепленной на нем конической шестерней 8, находящейся в зацепле- НИИ с конической шестерней 9, котора закреллена на валу электромагнитной муфты 10, установленной на одном из выходных валов мотор-редуктора 11. На втором его выходном валу установ- лена электромагнитная муфта 12, связанная с установленным на стойке 13 валом 14, на котором закреплены звез дочка 15 и шестерня 16, Звездочка 15 передаточной цепью 17 связана со звездочкой 18, закрепленной на пусто телом валу 19, на котором закреплен коробчатьй рычаг 20. В полости вала 19 установлена ось 21, одним концом закрепленная в кронштейне 22, на другом конце которой посредством шпонки 23 -установлена звездочка 24, связанная передаточной цепью 25 со звездочкой 26. Последняя шпонкой 27 жестко связана с валом 28, установленным с, возможностью вращения на свободном конце рычага 20 и несущим прикрепленную к нему вильчатой формы опору захвата 29, К стойке 30, в которой установлен вал 19, прикреплен путевой выключатель 31, ш-{еющий воз- можность взаимодействия с закрепленным на валу 19 кулачком 32, Шестерня 16 соединена с зубчатой рейкой 33 помещенной в направляющих 34 с возможностью перемещения в продольной горизонтальной плоскости, В рейке 33 выполнен паз 35 с упорами 36 и 37, которь мн служат его торцы, имеющими
.
|Qj
20 25ЗО 50 , S5
35
40
45
возможность взаимодействия с пальцем 38, закрепленным на зубчатом секторе 39, Последний установлен на оси 40 с возможностью вращения и взаимодействия боковыми поверхностями 41 и 42 с торцовой поверхностью 43 рейки 33 и зацеплен с шестерней 44, закрепленной посредством шпоНки 45 на вертикальном валу 46, установленном с возможностью вращения в стойке 47, К верхнему концу вала 46 прикреплен с-тол 48, имеющий диаметрально противоположные вильчатой формы гнезда 49 и 50 с проем ами, согласованными с соответствующими выступами захвата опоры 29, У каждого из адресатов линии станков установлен стол 5t с вильчатым гнездом 52,
Перегрузочное устройство работает следующим образом,
В исходном положении электромагнитные муфты 10 и 12 выключены, в результате чего шестерня 9 и звездочка 15 отсоединены от мотор-редукто- ра 11, опора захвата 29 расположена в крайнем нижнем положении, рейка 33 находится в крайнем правом положении, а ее торцовая поверхность 43 контактирует с боковой поверхностью 41 зубчатого сектора 39 фиксируя тем вертикальный вал 46 от поворота, в гнезде 49 стола 48 установлен груз 53, например тара с заготовками, а гнездо 50 свободно, в гнезде 52 стола 51 установлен груз 54, например тара с - обработанными деталями, при этом мог тор-редуктор 11 обесточен воздействием кулачка 32 на путевой вьжлюча- тепь 31,
По сигналу от стола 51 включается питание электромагнитной муфты 10, в дальнейшем - муфты и мотор-редуктора 11, чем приЕодятсл во вращение шестерни 9) и 8, вал 6, шестерни 5 и 4 и колеса 2, в результате чего , устройство доставляет потребителю со склада груз 53, при этом опора захвата 29 занимает положение напротив стола 51, а электромагнитная муфта 10 выключается. Вслед за этим включается- муфта 12 и посредством цепной передачи 15, 17 и 18 приводится во вращение вал 19 с рьтагом 20, валом 28, звездочкой 26, цепью 25 и кулачком 32. При этом ось 21 и звездочка 24 непо-. движны, так как скреплены с кронштейном 22, В процессе поворота рычага 2р цетть 25 перекатывается по неподвиж- .
ной звездочке 24, вынуждая звездочку 26, а с ней вал 28 и опору захвата 29, -поворачиваться на равный угол в направлении стрелки Ж, вследствие чего опора захвата 29 постоянно сохраняет горизонтальное положение. В процессе непрерывного вращения из полржения I в положение II рычага 20 опора захвата 29 вильчатыми выступами проходит сквозь ответные им проемы гнезда 52 стола 51, принимает на себя груз 54 и, пройдя через положение III в положение IV, устанавливает его в гнездо 50. В процессе вращения рычага 20 из положения I в положение III вращающаяся шестерня 16 перемещает рейку 33 в направлении стрелки И, при этом паз 35 позволяет пальцу 38 находиться вне контакта с рейкой 33, а ее поверхности 43 фиксировать поверхность 41 зубчатого сектора 39 в исходном положении. Как только опора захвата 29 опустится ниже стола 48, торцовая поверхность 43 рейки 33 выйдет из контакта с поверхностью 41 зубчатого сектора 39, а упор 36 рейки 33 вступит в контакт с пальцем 38 и, в процессе вращения рычага 20 из положения IV в положег ние I вынудит сектор 39 повернуться и установиться в положение, при котором поверхность 43 рейки 33 зафиксирует боковую поверхность А2 сектора 39, а поворотом стола 48 груз 53 установится в створе с опорой захвата 29 (фиг. 7). В момент установки рычага 20 в положение I кулачок 32 . воздействует на путевой выключатель 31, от команды которого мотор-редуктор 11 реверсируется, при этом рычаг 20 станет вращаться в направлении ; i стрелки К, а опора захвата 29 - в направлении стрелки Л, сохраняя при . этом горизонтальность расположения. Достигнув платформы.в положении IV, опора захвата 29 принимает на себя груз 53 и, пройдя через положение III в положение II, устанавливает его в гнезде 52 стола 51.
В процессе дальнейшего поворота рычага 20 из положения II в положение I рейка 33, перемещаемая тестер-
ней 16 в направлении стрелки М, освобождает от фиксации сектор 39 и, воздействуя упором 37 на палец 38, поворачивает сектор 39 и стол 48 в исходное положение. При достижении рычагом 20 исходного положения I кулачок 32 вновь воздействует на путевой выключатель 31, при повторном срабатывании которого выдается коман-, да на выключение муфты 12, включение муфты 10 и переключение мотор-редуктора 11 в направлении, требуемом для перемещения устройства на склад, где удаляют, а на стол 48 в гнезг до 49 устанавливают груз 53, чем завершается цикл работы устройства. При получении нового сигнала от потребителя весь цикл обмена груза повторяется в описанной последовательности.
Формула изобретения
1. Перегрузочное устройство, содержащее ходовую опору, связанную с приводом ее перемещения, на которой установлен с возможностью поворота в горизонтальной плоскости стол, отличающееся тем, что, с целью расширения функциональных возможностей и повьшения эффективности, оно снабжено закрепленной на ходовой опоре стойкой, на которой жестко установлено зубчатое колесо и с возможностью поворота в поперечной плоскости рычаг, на котором шар- нирно установлено соединенное бесконечной связью с указанным зубчатым колесом дополнительное зубчатое колесо, при этом привод связан с зубчатым колесам и посредством зубчато- реечной передачи со столом.
2. Устройство по п. 1, отличающееся тем, что рейка зубчато-реечной передачи установлена на ходовой опоре с возможностью перемещения в продольной горизонтальной плоскости и выполнена с пазом для установки пальца, который жестко закреплен на секторе, зацепленном с зубчатым колесом, которое установлено на указанном столе.
. tiuS fl
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи штучных грузов с одного конвейера на дрYгой | 1984 |
|
SU1244063A1 |
| Делительная машина | 1958 |
|
SU118618A1 |
| Трехосный станок с ленточной пилой | 1932 |
|
SU33270A1 |
| Устройство для захвата, транспортирования и сброса груза | 1957 |
|
SU109522A1 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| ОСТАНОВОЧНО-ПУСКОВОЙ МЕХАНИЗМ ДЛЯ ПОДЪЕМНИКОВ | 1928 |
|
SU9819A1 |
| Установка для подготовки корпусов боеприпасов к снаряжению | 1970 |
|
SU1841253A1 |
Изобретение относится к промышленному, а именно к внутрицеховому транспорту, и может быть использовано в гибких автоматизированньгх линиях. Цель изобретения - расширение функциональных возможностей и повышение эффективности. Перегрузочное устройство содержит установленньш на ходовой опоре поворотный стол 48 и захват 29 для груза, установленный на поворотном рычаге 20 и снабженный цепной передачей для удержания захвата в горизонтальном положении. Привод поворота рычага связан посредством зубчато-реечной передачи с поворотным столом 48 для обеспечения их синхронной работы. 1 з.п. ф-лы, 7 ил.
5 n год g f
--VA / /
3 - 35 50 Г4
Фш.
Bad 6
/
ffS
Ч 39 0 38 33 ФигА
28
Фиг.6
Фа.ъ.5
33J73S- 35 39 43 :J У / .L/ /,/
фиг,
| Приспособление для поворота грузонесущего органа перегрузочной тележки | 1983 |
|
SU1143668A1 |
