1
Изобретение относится к области манинуляторостроения и предназначено преимущественно для копирующих манипуляторов, дистанционно выполняющих работы в герметичных камерах.
Известен привод захвата через суставы манипулятора посредством стержней, размещенных в его шарнирно соединенных звеньях.
Однако нагружепие такого привода захвата вызывает реактивные моменты в кинематических цепях других движений, а именно в цепи вращения кисти, изгиба кисти и, кроме того, при вращении и изгибе кисти или локтевого сустава манипулятора в элементах кинематической цепи привода захвата неизбежны паразитные движения, приводящие к повышению сопротивлений в манипуляторе при его работе, а также к изменению усилия в цепи привода захвата.
Предлагаемый привод отличается от известных тем, что его стержни установлены с возможностью осевого поступательного перемещения и снабжены на концах роликами, установленными на вилках или в сепараторах и контактирующими с подвижными вдоль осей суставов клиньями, выполненными, например, в виде подпружиненных конических шайб, двусторонних конических шайб или втулок с наклонными направляющими, в том числе и двусторонними.
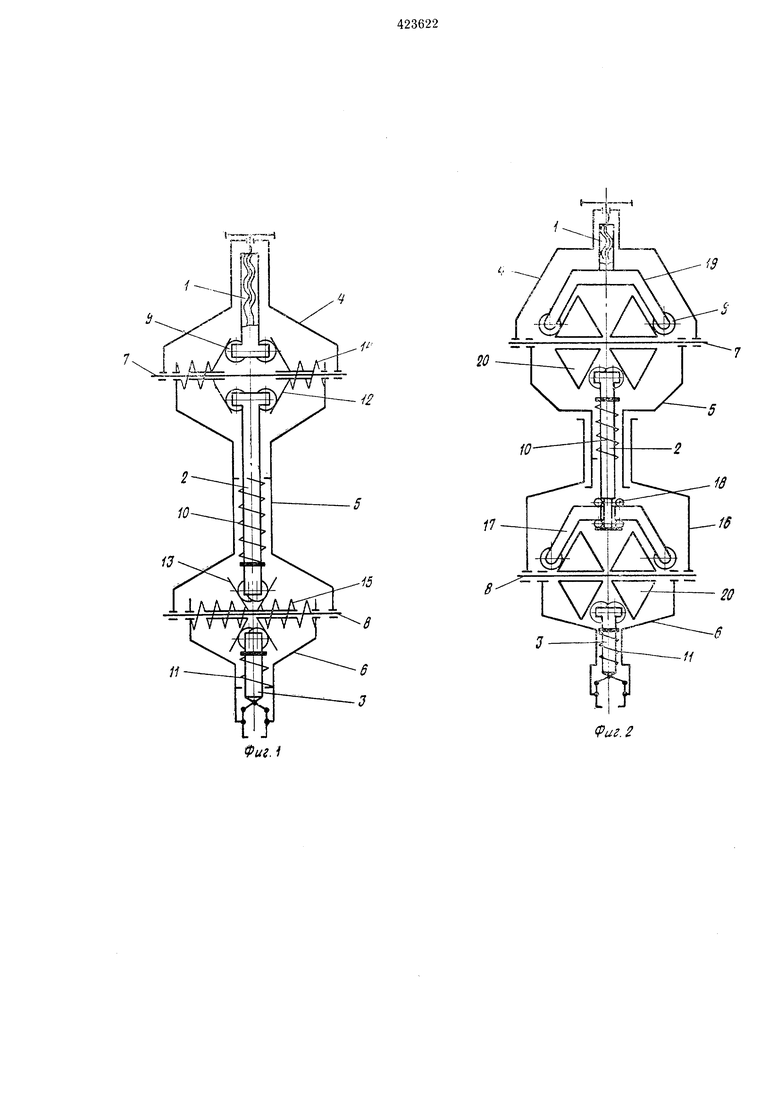
Такое выполнение привода захвата обеспечивает его кинематическую независимость, передачу усилия более чем через один сустав и варьирование усилия захвата. На фиг. 1 показан привод захвата, в котором усилие зажима передается через подпружиненные конические шайбы; па фиг. 2 - то же, усилие зажима передается через двусторонние конические шайбы, на фиг. 3 - то же,
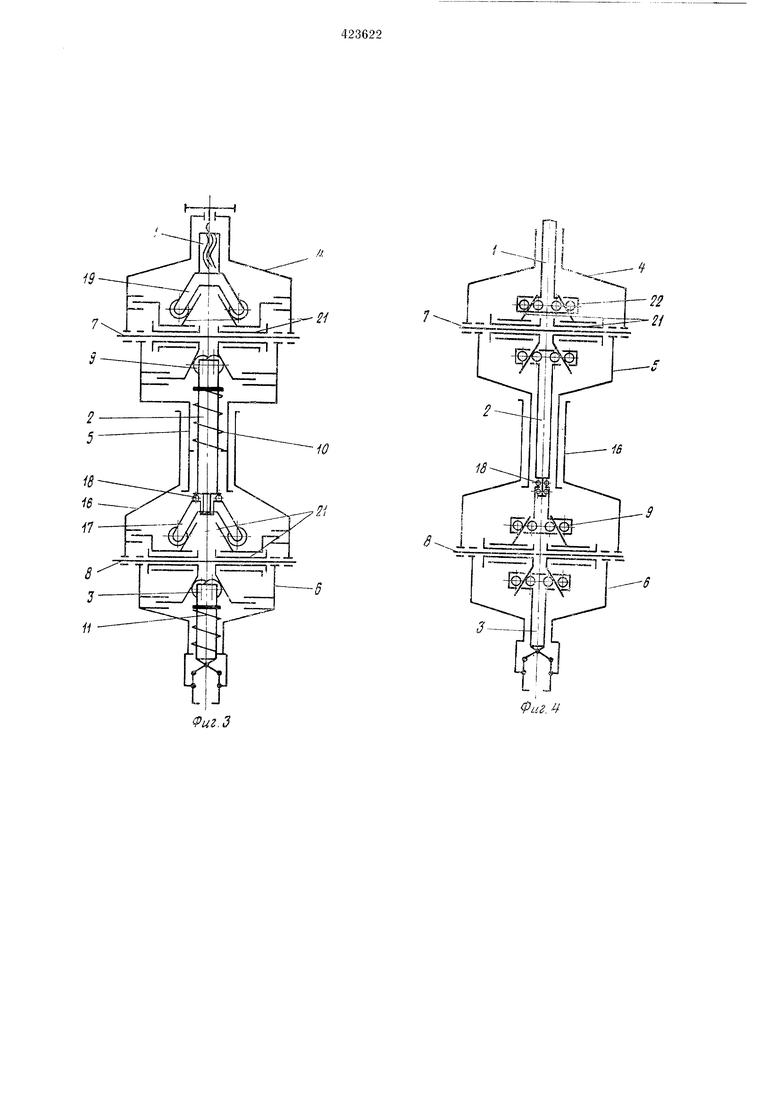
усилие зажима передается через две нары втулок с наклонными нанравляющими; на фиг. 4 - то же, усилие зажима передается через двусторонние иаправляющие и ролики, установлеппые в сепараторах; на фиг. 5 - то
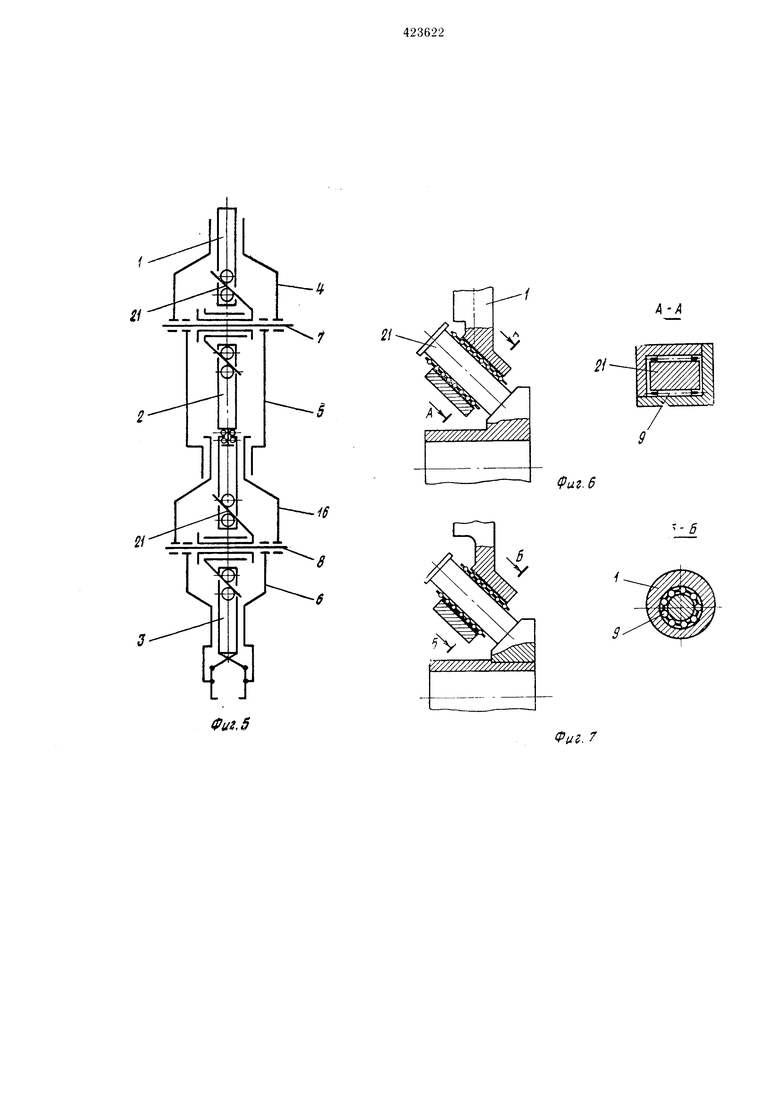
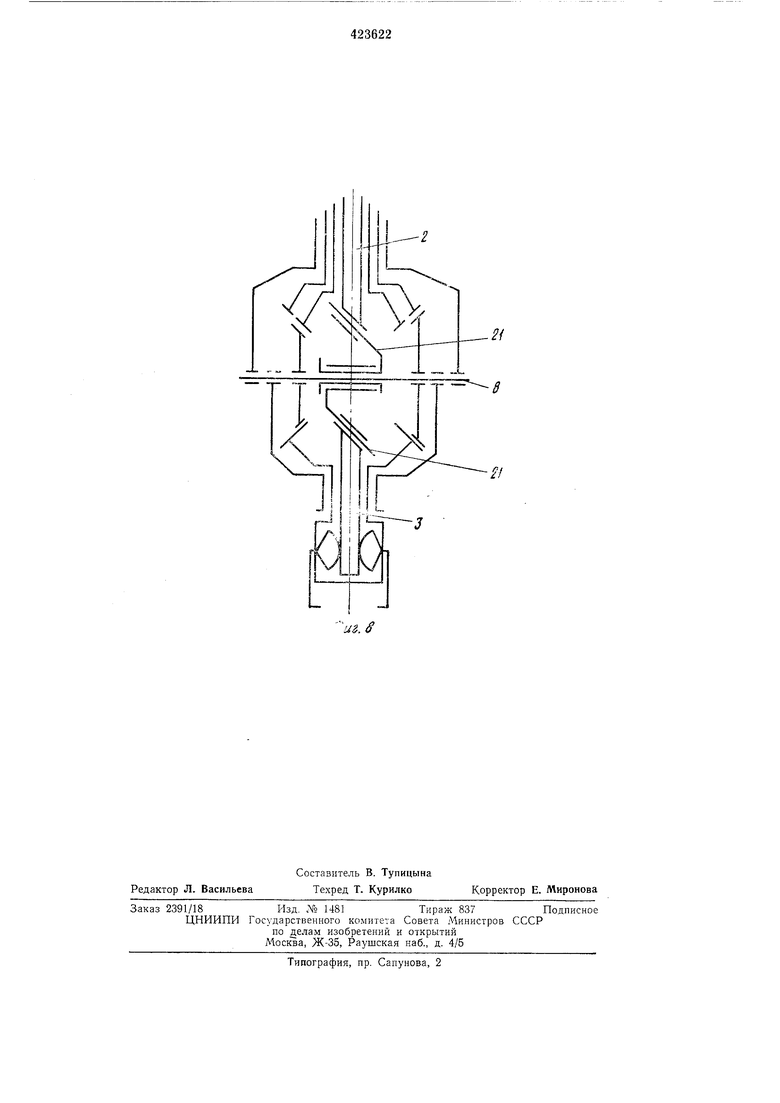
же, с одно1 парой втулок на каждой оси шарпира; на фиг. 6 - вариант выполнения оиорпого элемента стержня в виде корпуса прямоугольного сечения; на фиг. 7 - вариант выполнения опорного элемента стержня в виде
втулки; па фиг. 8 - схема установки привода захвата в кисти манипулятора с коническими колесами.
Предлагаемый захват привода состоит из поступательпо перемещающихся стержией 1,
2 и 3, установленных соответственно внутри предплечия 4, локтя 5 и кисти 6, шарнирно соединенных с помощью осей 7 и 8. На концах стержней установлены ролики 9. На стер.жне 2 установлена пружина сжатия 10, на
стержне 3 - пружина сжатия 11.
На осях 7 II 8 подвижно вдоль них установлены конические шайбы 12 и 13, поджимаемые пружинами 14 и 15.
Для обеспечения вращения локтя (фиг. 2-4) его корпус содержит вращающуюся часть 16, а стержень 2 соединен с вилкой 17 через упорный подшипник 18. На торце стержня 1 закреплена вилка 19 с роликами 9.
На осях, соединяющих звенья :.1анипулятора, смонтнрованы две двухсторонние конические шайбы 20, охватываемые вилками 19 п 17 и распираел1ые роликами, установленными на торцах соседних стержней.
На осях, соединяющих звенья манипулятора (фпг. 3 и 4) смонтнрованы две пары втулок 21 с паклоппыми направляющими.
Опорные элементы стержней могут быть выполпены в виде сепараторов 22, заполненных роликами, с отверстиями для двухсторонвнх наклонных направляющих втулок 21 (фиг. 4).
Нривод захвата работает следующим образом.
При перемещении стержня 1 в нанравлении к осп 7 клинья, вынолненные в виде подпружиненных коннчески.х шайб, двусторонних конических шайб пли втулок с паклопными направляющими, раздвигаются, вызывая осевое Г1ереме1цение стержня 2 (на фиг. 1 и 4 вверх, па фиг. 2 и 3 - вниз) п сближение клиньев, установленных на оси 8, выталкивающих стержень 3, и тем самым осуществляя закрывание захвата. Прн закрытом ноложении захвата усилия, имеющиеся в стержнях, не оказывают никакого влияния на остальные двнжения манинулятора. Изгиб манипулятора относительно осей 7 п 8 и вращение части 16 локтя с кистью 6 относительно невращающейся части локтя 5 также не ириводят к изменению усилия зажима захвата. Для открывания захвата стержень 1 пере:мещают от оси 7. Это вызывает перемещение стержня 3 к оси 8, обеспечивающее открывание захвата.
Г1 р е д м е т п з обретения
1.ПривОуД захвата через суставы манипулятора посредство: 1 стержней, размещенных в
его шарнирно соединенных звеньях, отличаю щ и и с я тем, что, с целью обеспечения кинематической независимости привода захвата, стержни привода установлены с возлюжностью осевого ност-упательного неремещення и снабжены па концах роликами, контактирующими с клиньями, которые установлены нодвнжно вдоль осей суставов.
2.Привод по п. 1, отличающийся тем, что, с целью передачи усилия более чем через
один сустав, клинья выполнены в виде подпружиненных конических шаГю и в соседних суставах установлены разнонаправленно:водном суставе внутрь вершинами конусов, а в соседнем - наружу.
3. Привод но ип. 1 и 2, отличающийся те.м, что, с целью варьированпя усилия зажима, конические выполпены двустороннимп, при этом ролики стержпей одного звепа манинулятора расположены шайбами, а ролики стержпя соседпего звена устаповлены на вплке, охватывающей наружные поверхности этих же ша11б.
4.Привод по п. 1, от л п ч а 10 щ и и ся тем, что клинья выполнены в виде зафпксированных от нроворота двух пар втулок с наклонными направляющими для роликов стержней.
5.Привод по пп. 1 и 4, отличающийся те.м, что наклонные направляющие снабжены контактными поверхностями с обенх сторон,
а ролики установлены в сепараторах с отверстиями для наклонных панравляющпх.
//
i9
/7
8
20
иг.2
Фиг. Ч
Фиг. 6
-5
Фиг,§
Фиг. 7
f/
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод захвата манипулятора | 1975 |
|
SU521128A1 |
| Кисть манипулятора | 1982 |
|
SU1098785A1 |
| Задающий механизм манипулятора | 1972 |
|
SU547337A1 |
| АВТОМАТ ДЛЯ КРЕСТОВОЙ НАМОТКИ ШВЕЙНЬГХ НИТОК НА ЦИЛИНДРИЧЕСКИЕ ГИЛЬЗЫ | 1969 |
|
SU234904A1 |
| Транспортно-ориентирующий манипулятор Мухина | 1987 |
|
SU1491695A1 |
| Привод захвата манипулятора | 1976 |
|
SU607730A1 |
| ТАЗОБЕДРЕННЫЙ СУСТАВ ЭКЗОСКЕЛЕТА | 2013 |
|
RU2549015C2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| СТАНОК ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1990 |
|
RU2017513C1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |