сл
со
оо со ;о
Изобретение относитея к подъемно-транспортному машиностроению, а именно к манипуляторам, предназначенным для rioi py- З()чно-)аз1 руз()чны работ и управляемым н) с iioMOHibK) устройства, установленного на конце П1арнирной стрелы и за- даюним о нриводу манипулятора соответствующие екорости перемещения, и может быть ис11оль)3ован() в нр()мы111ленноети для за1 рузки станков заготовжами, етзсма обработанных деталей, складских операций, обслуживания пресса и дру1ч)го технолог ичес- кого оборудования.
Целью изобретения является упрощение конструкции и повышение удобства обслуживания.
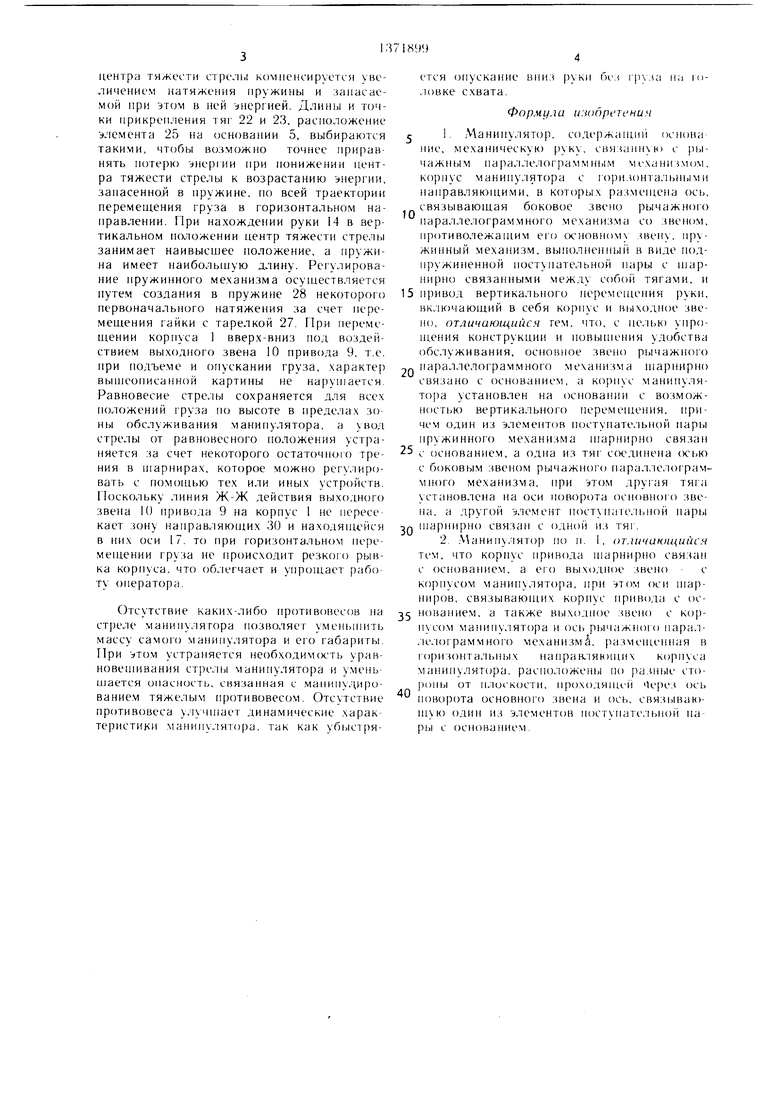
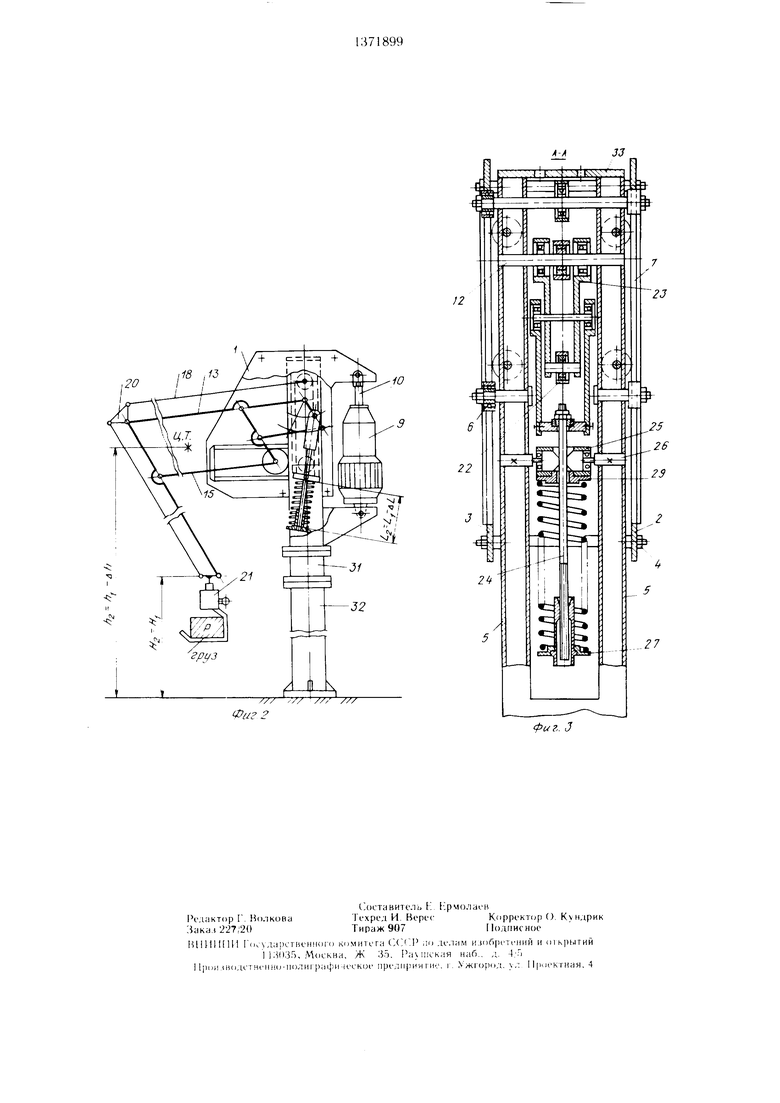
На фиг. 1 изображен манипулятор с вер- тика, 1ьным ноложением руки его стрелы, общий вид; на фи1. 2 то же, с рукой стре- ль1. отклоненной от вертикали; на фи|-. 3 разрез Л-А на (|)И1. 1.
ЛАанину.тятор содержит корпус 1, состоящий из двух щек 2 и 3, соединенных пищльками 4, установленный на основании S с закрепленными на нем роликами 6, размещенными в нагфавляющих 7 щек 2 и 3. На кронштейне 8 основания 5 закреплен привод 9 вертика.чьног о неремепхения руки с выходным звеном 10, например ннев- моцилиндр. Выходное звено 10 перемещает корпус 1 манипулятора, воздействуя на него через ось II. На основании 5 на оси 12 установ. 1ена стрела, выполненная в виде )ычажно|-о нара,1лелограмного механизма, Koio()biii состоит из основного звена 13, )уки 14, звена 15, противо.тежащего основному звену, и бокового звена 16. Звенья 15 и К) сое.аинены ос1Ж) 17, снабженной катками 5се ЗЕК Н1,я )ычажного паралле,Т()грам- НО1 о механизма iiia)HKpiio соединены между собой и с основанием 5 иодшипниковы.ми узлами, снижаю цими трение (фиг. 3).
1аралле. 1ограммньп1 механизм и.меет трапс.чятор, состоящий из тяг 18 и 19 и серь- 1и 20, 11озво. 1яющих со.чранятБ вертикальное но.ложение го.товки схвата 21, на которой закреплен груз. С боковым звеном 16 сое- дине}|а тяга 22, 11арал. 1ел1 ная основному звену 13. которая соединена с качающейся на оси 12 тиюй 23, параллельной боковому звену 16, на которой закреплен э.мемент 24 |1оступате. пары в точке, расп(),тожен- ной между осью 12 и П1арниром, соединяю щим тяги 22 и 23. Э,1емент 24 вьиюлнен в виде стержня с проушиной, который проходит через отверсгие в Д)угом элементе 25 пос1у11ател1)11ой Hapiji, вьп1олненн(;й в виде траверс), нарнирно уста 1овле1щой ia оси 26 ia основании 5. Элемент 24 через регу- ,И)овочнук гайк) и тарелку 27 1ередает усилие 11руж 1 28 на элемент 24. ZlpyrHM ко)|цом пружина )ается в тарелку 29, становлен 1 К) и выточке э. 25.
0
5
0
5
0
5
0
5
0
5
ма 1ипулятора имеет горизонтальные а равляющие 30, но которым нереме- иается ось 17 с катка.ми. Основание 5 уста- новле о на опорно-новоротном устройстве 31, закрепленном на Ш юльной оддержи- вающей конструкции, 1а 1ример, в виде колонны 32. При еобходимости мани улятор может ском 1онован в подвесном вари- , для чего о орпо- 1оворотное устрой- cTB(j крепится к верхней г еремь чке 33 вания 5, а ко.тонна к о орно-г ово- ротному устройству и нодвес юй иоддержи- ваюп,ей конструкции.
Л1ани улятор работает следуюц,им обра зо.м.
При включении иривода 9 вертикального 1еремещения руки 14 его выходное звено 10 воздействует через ось 11 на ма- ни 1улятора и Г1ереме цает его га на 1рав- 7 по роликам 6. Направляющие 30 воздействуют на ролики оси 17, которая через боковое звено 16 риводит в действие основное звено 13, руку 14 и далее весь механизм стрелы. Груз этом 1однимает- ся. 11ри выключении нривода 9 груз опускается. Управление 1 риводом осу цествля- ется О 1ератором со стороны головки схвата 21.
Нри необходимости ереместить груз по горизонтали в ацравлении « к колонне или «от колонны О ератор прикладывает к грузу или головке схвата небольщое усилие. Нри этом из.меняется угол между рукой 14 и основным звеном 13 стрелы .манинуля- тора. Одновременно груз движется по траектории, близкой к горизонтальной, так как ось 17 с роликами г еремещаются но горизонтальным 1 а 1равляю цим 30 1, а соотно цение длир звеньев, составляю- цих араллелограмнь Й механизм стрелы, выбрано таким, чтобы обес 1ечить указан- ую траекторию. центр тяжести (ЦТ) звеньев, составляющих ст)елу, нри этсзм г онижается, так как h , ( де h - расстояние от ола до 1ентра тяжести стрелы в момент, когда рука 14 занимает вертикальное по. южение; дЬ - величина онижения центра тяжести стрелы). Боковое звено 16 оворачивается, оставаясь этом параллельным руке 14, и через 22 оворачивает тягу 23 вокруг оси 12. 11р 1крепленный )о к нему элемент 24 носту1 ательной из-за качательног о движения тяги 23 1ерсме цается и сжимает 1 ружину 28 до . (где U - ) 1ри вертикальиом положе- руки 14; Ij то же, ри отклонении от верт 1кального оложения руки; б1 - вели- сжатия 1ружи ы), в 1ружине Э1 ергию, г риблизите..) равную ее 1 отере, роисц ед цей 1ри по 1ижении 1ентра тяжес- С1релы. достигается ле коеть ере- мен1ен 1Я груза, так как работа
центру тяжести стрелы компенсируется увеличением натяжения пружины и занасае- мой при атом в ней :)нерг ией. Длины и точки прикрепления тяг 22 и 23, расположение элемента 25 на основании 5, выбираются такими, чтобы возможно точнее приравнять потерю энергии при понижении центра тяжести стре.ты к возрастанию энергии, запасенной в пружине, по всей траектории церемещения груза в горизонтальном на- фавлении. При нахождении руки 14 в вертикальном положении центр тяжести стрелы занимает наивысшее положение, а пружина имеет наибольшую длину. Регулирование нружинного механизма осуществляется нутем создания в пружине 28 некоторого первоначального натяжения за счет пере- мешения гайки с тарелкой 27. При перемещении корпуса 1 вверх-вниз под воздействием выходного звена 10 привода 9, т.е. нри подъеме и опускании груза, характер вышеописанной картины не нарушается. Равновесие стре.лы сохраняется для всех положений 1-руза по высоте в пределах зоны обслуживания манипулятора, а увод стрелы от равновесного положения устраняется за счет некоторого остаточного трения в шарнирах, которое можно регулировать с помощью тех или иных устройств. Поскольку линия Ж-Ж действия выходного звена 10 привода 9 на корпус 1 не пересекает зону направляющих 30 и находящейся в ни.х оси 17. то при горизонтальном перемещении груза не происходит резкого рывка корпуса, что об.тегчает и упрощает работу оператора.
Отсутствие каких-либо противовесов на ст1)еле манипулятора позволяет уменьшить массу самого манипулятора и его габариты. При этом устрапяется необходимость урав- новецшвания стре;пэ1 манипулятора и умень- 1иается опасность, связанная с манипудиро- ванием тяжелым противовесом. Отсутствие противовеса улучшает динамические характеристики манипулятора, так как убыстря0
ется опускание вниз )укп бс-з .)a на гп- ,1овке схвата.
Формула изобретения
г 1. ЛАанинулятор, содержащш основа ние, механическую , связанную с чажным параллелограммным чн ханиз.мом, корпус манипулятора с горизонтальными направляющими, в которых размешена ось, связывающая боковое звено рычажнснч) нараллелограм.много .механизма со звеном, противолежащим его основному звену, пружинный механизм, вынол)енньп1 в виде подпружиненной поступательнс й нары с njap- 1шрпо связанными между собой тягами, и
5 привод вертикального перемещения руки, вк,1ючаюший в себя корпус и выходное звено, отличающийся гем, что, с пелью упрощения конструкции и новьпнения удобства обслуживания, основное звено рычажного
,,. нараллелограммного механизма HiapfiHpno связано с основанием, а корпус манипулятора установлен на основании с возможностью вертикального перемещения, причем один из элементов поступательной пары пружинного механизма шарнирно связан с основание.м, а одна из тяг соединена (К ью с боковым звеном рычажного пара, 1ле,п()грам- много механизма, при этом друг ая тяга установлена на оси поворота основного звена, а другой элемент постхпагельной нары
g шарнирно связан с одной из тяг.
2. Л анипу, 1ятор по п. 1, отличающийся тем, что корпус нривода шарнирно связан с основанием, а его выход}1ое звено - с корпусом манипулятора, нри этом оси шарниров, связывающих корпус привода с ос5 повапием, а также выходное звено с корпусом . 1ятора и oct) рычажного нара, 1- , 1е,тограммного механизм, размени нная в I оризонтальньгх ,:1як)ших корпуса манипулятора, расположены по разные сто- роШ) от плоскости, проходяпи-й Через ось поворота основного звена и ось, связьп аю- ) один из элементов поступате, 1ьно11 нары с основанием.
5
0
,20
Фиг 2
7
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1602728A2 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Манипулятор | 1984 |
|
SU1283087A1 |
| Рука манипулятора | 1985 |
|
SU1303400A1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022772C1 |
| Манипулятор | 1983 |
|
SU1098784A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| Манипулятор с программным управлением | 1972 |
|
SU510362A1 |
| Манипулятор Ильина | 1983 |
|
SU1148777A1 |
Изобретение относится к нодъемно- TpaHciKjpTHOMy машиностроению, а именно к манинулятора.м, предназначенным д. 1я ногрузично-раз1-рузо1|ны. работ. Цель изоб- нтения - упрощение конструкции и новы- Н1ение удобства обслуживания. При включении иривода 9 вертикального неремен1е- 1Н1я руки 14 выходное звено 10 воздействует через ось 11 на корнус 1 и нерехимцает er(j 110 направляющим. Направляющие 30 воздействуют на ролики оси 17, которая через боковое звено 16 приводит в действие основное звено 13, руку 14 и далее весь ме- .хаиизм стрелы. Груз при этом поднимается. При выключении привода 9 опускается. Управление приводом осу111еств, 1я- ется оператором со стороны головки схвата 21. 1 з.п. ф-лы, 3 ил.
| Патент ГЛП.Л . | |||
| 3402911, кл, 248 - 325, опублик | |||
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Авторское свидете | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
