Изобретение относится к области приборостроения, в частности, автоматизации управления движением транспортных машин..
Наибольшее применение оно может найти при создании систем автоматической ориентации транспортных и технологических объектов при задании опорного направления с помощью токонесущего проводника.
Известно устройство автоматического управления движением транспортных средств, содержащее генератор, ориентирующие токонесущие проводники с однонаправленными токами, чувствительный элемент, схему сраенения, источник эталонного напряжения.
Известно также устройство для ориентации транспортных средств в электромаг- .нитном поле токонесущего проводника, уложенного в виде замкнутой рамки по краям трассы, содержащее два индукционных
датчика, связанных со входами схемы сравнения, и исполнительные органы.
Недостатком известных устройств является низкая точность управления на заключительных участках трассы движения. Наиболее близким по своей технической сущности является устройство ориентации, .содержащее два индукционных измерительных преобразователя, сумматор, две схемы сравнения, источник опорного напряжения, индикатор, регулятор и исполнительные органы.
Недостатком этого устройства также является низкая точность управления положением объекта на заключительном участке трассы из-за возрастания величины ориентирующего поля при приближении к краю ориентирующей линии (замыкающему проводнику).
Целью изобретения является повышение точности управления положением объекта на заключительных участках трассы.
-ч о
Os
о
00
XI
Поставленная цель достигается тем, что в звестное устройство, содержащее два инукционных измерительных преобразоватея, расположенных симметрично продольной си Движения машины, две схемы сравнения, сумматор, источник опорного напряжения, регулятор, исполнительные органы и индикаор, введен управляемый делитель, информационный вход которого подключен к выходу первой схемы сравнения, управляющий вход соединен с выходом второй схемы сравнения, а выход - со входом регулятора.
Благодаря введению управляемого делителя достигается повышение точности управления транспортной машиной на заключительных участках трассы за счет устранения влияния возрастания поля вблизи концов ориентирующей линии.
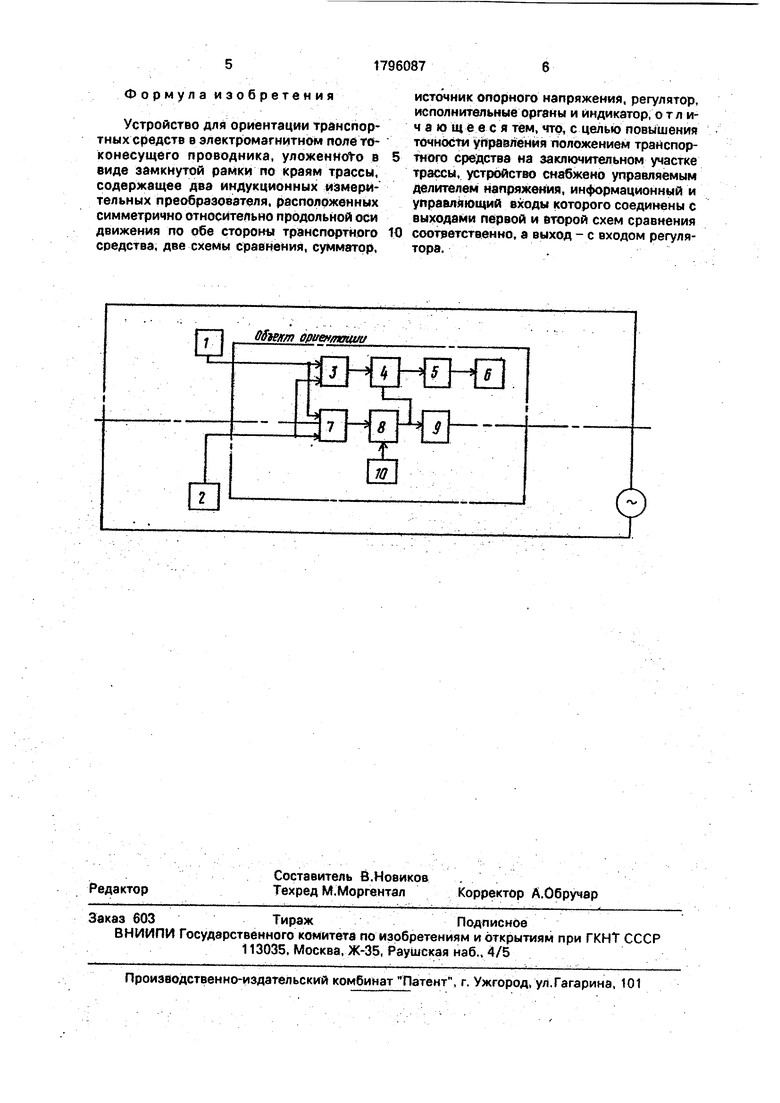
На чертеже представлена блок-схема предлагаемого устройства; где: 1,2 -первый и второй измерительные преобразователи (ЙП), 3 - первая схема сравнения, 4-управляемый делитель, 5 - регулятор, 6 - исполнительные органы, 7 - сумматор, 8 - вторая схема сравнения, 9 - индикатор, 10 - источник опорного напряжения,
Устройство содержит первый и второй измерительные преобразователи 1, 2, расположенные симметрично продольной оси движения машины. Их выходы подключены к первой схеме сравнения 3 и сумматору 7, Выход схемы 3 подключен на информационный вход управляемого делителя 4, а его управляющий вход соединен с выходом второй схемы сравнения 8. Выход делителя 4 через регулятор 5 соединен исполнительными органами 6, Выход сумматорч 7 соединен с первым входом второй схемы сравнения, на второй вход которой подключен источник опорного напряжения 10. Индикатор 9 подключен к выходу схемы сравнения 8,
Сущность изобретения заключается в следующем.
Так как ориентирующая линия имеет ограниченные размеры, то при приближении к ее концам напряженность поля внутри линии начинает возрастать {сказывается влияние замыкающего проводника). Поэтому одному и тому же отклонению машины от заданной трассы на разных участках трассы будут соответствовать разные уровни сигнала управления. С целью исключения указанного недостатка предлагается введение управляемого делителя, а устройство работает следующим образом. При нахождении машины, например, на середине линий, выходной сигнал сумматора 7 остается практически постоянным и на выходе схемы Сравнения 8 сигнал также остается постоянным, а сигнал управления со схемы сравнения 3 без изменения проходит через управляемый делитель 4 и регулятор 5, воздействуя на исполнительные органы 6, с помощью которых машина возвращается на
заданную трассу. При приближении к краю ориентирующей линии усиливается влияние замыкающего проводника и сигнал на выходе сумматора 7 начинает возрастать. Этот сигнал сравнивается с величиной опорного
0 напряжения источника 10 на схеме сравнения 8. Величина опорного напряжения источника 10 устанавливается в соответствии с размерами и током в ориентирующей линии. В результате этого сравнения образу5 ется сигнал, эквивалентный приращению выходного сигнала сумматора 7, который воздействует на управляющий вход делителя 4 и тем самым изменяет его коэффициент передачи, В результате чего сигнал управле0 ния машиной, если таковой имеется, изменяется :в соответствии с приращениями напряженности поли в местах нахождения измерительных преобразователей, т.е. увеличение напряжения на выходе сумматора
5 уменьшает коэффициент передачи делителя 5 и наоборот.
Таким образом предлагаемое устройся во обеспечивает точность управления положением машиной на заключительных
0 участках трассы, по крайней мере в 1,5 - 2 раза выше, чем у известных. Это повышение точности обеспечивается за счет исключения из сигнала управления погрешностей, вызываемых возрастанием напряженности
5 поля на краях трассы, путем применения управляемого делителя.
В Институте электроники АН БССР создан макет, реализующий предлагаемое устройство. Макет был собран на микросхемах
0 средней интеграции типа К140. Схемные решения не отличаются от описанных в книге Применение прецизионных аналоговых микросхем, авторы А.Г.Алексеенко. ЕАКоломбет и др. М.: Радио и связь 1985 г. 8 качестве
5 измерительных преобразователей использовались резонансные LC-контура с воздушным сердечником. Величина тока с линии 0,5 А, .частота5кГц, ... : Предлагаемое устройство может найти
0 широкое применение при создании систем автоматической ориентации подвижных технологических объектов,.В частности, его использование для автоматического управления положением транспортных машин
5 позволит улучшить динамические показатели системы управления на заключительных участках трассы, позволит получить, по предварительным расчетам, экономический эффект около 5,0 тыс, руб на одну машину.
Формула изобретения
Устройство для ориентации транспортных средств в электромагнитном полето- конесущего проводника, уложенного в виде замкнутой рамки по краям трассы, содержащее два индукционных измерительных преобразователя, расположенных симметрично относительно продольной оси движения по обе стороны транспортного средства, две схемы сравнения, сумматор,
источник опорного напряжения, регулятор, исполнительные органы и индикатор, о т л и- чающееся тем, что, с целью повышения точности управления положением транспортного средства на заключительном участке трассы, устройство снабжено управляемым делителем напряжения, информационный и управляющий входы которого соединены с выходами первой и второй схем сравнения соответственно, а выход - с входом регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего проводника | 1990 |
|
SU1777682A1 |
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего провода | 1982 |
|
SU1064884A1 |
| Способ ориентации самоходной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1285148A1 |
| Устройство контроля параллельности проходимых траекторий | 1984 |
|
SU1190031A1 |
| Устройство контроля положения горной машины в индукционном поле токонесущего проводника | 1984 |
|
SU1263844A1 |
| Кабелеизвлекающая машина | 1983 |
|
SU1143809A1 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| Устройство для регулирования температуры | 1980 |
|
SU877491A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО РОБОТА | 2004 |
|
RU2279118C2 |
Изобретение относится к области приборостроения, в частности к автоматизации управления направленным движением транспортных машин. Целью изобретения является повышение точности управления на заключительных участках трассы движению. Исключение из сигнала управления влияния возрастания величины ориентирующего поля на заключительных участках достигается тем, что введен управляемый делитель напряжения 4, информационный вход которого подключен к выходу первой схемы сравнения 3 управляющий вход соединен с выходом второй схемы сравнения 8, а выход - с входом регулятора 5. Наличие управляемого делителя напряжения 5 позволяет осуществить выравнивание уровней управляющих сигналов. 1 ил.
| Устройство для ориентации транспортных средств в электромагнитном поле токонесущего провода | 1982 |
|
SU1064884A1 |
