11 Изобретение относится к машинсг строению и может быть использовано при определении моментов инерции произвольных тел. Известен способ определения момента инерции тела, заключающийся в том, что тело устанавливают на платформу, сообщают ей вращательное движение, определяют его параметры и по результатам аналитически расчи тывают момент инерции тела. В известном способе определение парамет ров движения тела осуществляют изме рением времени опускания груза, при водящего платформу во вращательное движение посредством гибкой нитиГ1 Недостатком известного способа является низкая точность определени момента инерции, обусловленная неточным учетом сил трения,которые по лагаются постоянными. Наиболее близким к изобретению является способ определения момента инерции тела при котором тело устанавливают на платформу с горизонтальной осью вращения и известным дисбалансом, сообщают ей вращательное движение и измеряют его парамет ры при одном значении дисбаланса, п которым аналитически определяют момент инерции. В известном способе определяют параметры колебательного движения тела т.е. период колебаний C2D. Однако для известного способа характерна низкая точность определе ния MOMei Ta инерции тела, обусловлеуная тем, что не учитываются силы трения при колебательном движении платформы. Цель изобретения - повышение точ ности определения момента инерции тела за более точного учёта си трения. Поставленная цель достигается те что согласно способу определения мо мента инерции тела, заключающемуся в том, что тело устанавливают на платформу с горизонтальной осью вра щения и известным Дисбалансом, сооб щают ей вращательное движение и измеряпот его параметры при одном значении дисбаланса, по которым аналитически определяют момент инерции, дополнительно измеряют параметры движения При втором значении дасбаланса, а за измеряемый параметр принимаютмгновенную угловую скорос платформы при четырех ее угловых положениях, отличающихся друг от друга на угол F. На чертеже изображена схема устройства для реализации способа определения момента инерции тела. Устройство содержит платформу 1 с горизонтальной осью вращения для закрепления контролируемого тела 2 и два сектора 3, закрепленные подвижно на оси вращения платфоркш 1 и создающие известный дисбаланс. Способ определения момента инерции тела реализуется следующим об разом. На платформу 1 закрепляют контро-: лируемое тело 2, сектора 3, создаюище дисбаланс, фиксируют под произвольным углом относительно тела 2, например равньм нулю, приводят платформу 1 в свободное вращательное движение и измеряют мгновенную угловую скорость платформы 1 при четьфех её последовательных положениях, отличающихся друг от друга на угод J . Измерения проводят с помощью дйзгх датчиков (на чертеже не показаны) мгновенной угловой скорости, расположенных в вертикальной рлоскости с обоих сторон платформы 1. После этого, изменив взаимное положение секторов 3, например на угол, равный 2, повторяют измерения. Свободное вращение платформы изза наличия дисбалансов и возможного смещения центра масс тела с оси вращения платформы неравномерно. Изменение кинетической энергии платформы с телом при её повороте на угол от О до Jf, можно выразить -(ы2-и) , (1) момент инерции тела отно-г сительно оси вращения платформы, момент инерции платформы о носительно оси вращения , мгновенные угловые скорости платформы при угле её поворота О и J7 соответственно, статический момент тела относительно оси вращения, работа сил тяжести тела, равная произведению его веса G на путь, пройденный центром его масс 25 2G а, где а - сме щение центра масс тела от оси вращения, 4(it - работа сил тяжести секторов , вес сектора, расстояние от оси вращения платформы до цент ра масс сектора, Ау - работа сил трения. Аналогично (t) можно написать вы ражения для изменения кинетической энергии платформы с телом и для остальных участков движения на участк ТГ-2Ж (wJ-i«o)-2S-4( (21 на участке 2J-37f .(цl|-u 5)5 + (3) 2 V 3 2 Г 3 Полагая, что работы сил трения н различных з асткак движения связаны соотношением 5 А, 1 54 и, составляя выражения изменения кинетической энергии при движении платформы с развернутыми на угол 2ft секторами, учитывая, что работа сил тяжести сёкторов при этом равна , после преобразования записанных зависимостей получаем ,; .М О -7 г-2 А-з(ы2-с -ш|))д 6 з(ы2,и)). LO -.значение мгновенной угловой скорости после изменения дисбаланса платформы. Таким .образом благодаря тому, что измеряется мгновенная угловая скорость вращения платформы при четы-рех её положениях и различных дисбалансах платформы, повьшается точность определения момента инерции тела, за счет учета и исключения из расчетных уравнений работы сил трения.
СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ТЕЛА, заключающийся в том, что тело устанавливают на платформу с горизонтальной осью врзйцения и известным дисбалансом, сообщают ей вращательное движение и измеряют его параметры при однрм значении дисбаланса, по которым аналитически определяют момент инерции, отличающийся тем, что, с целью пойышения точности определения, дополнительно измеряют параметры движения при второй значении дисбаланса, a за измеряемый параметр принимают мгновенную угловую скорость платформы при четырех ее угловых 3 положениях, отличающихся друг от друга на угол J. ел о СП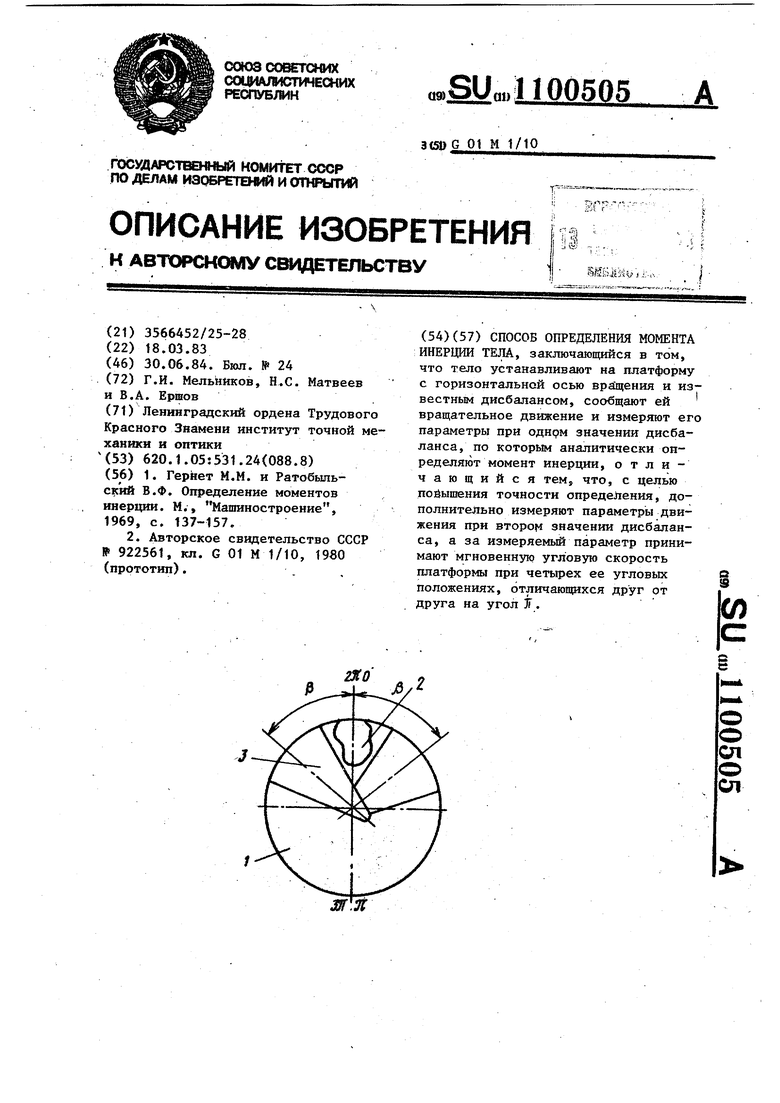
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Герйет М.М | |||
| и Ратобыльский В.Ф | |||
| Определение моментов инерции | |||
| М., Машиностроение, 1969, с | |||
| Способ приготовления строительного изолирующего материала | 1923 |
|
SU137A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения тензора инерции | 1980 |
|
SU922561A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| , | |||
