ел
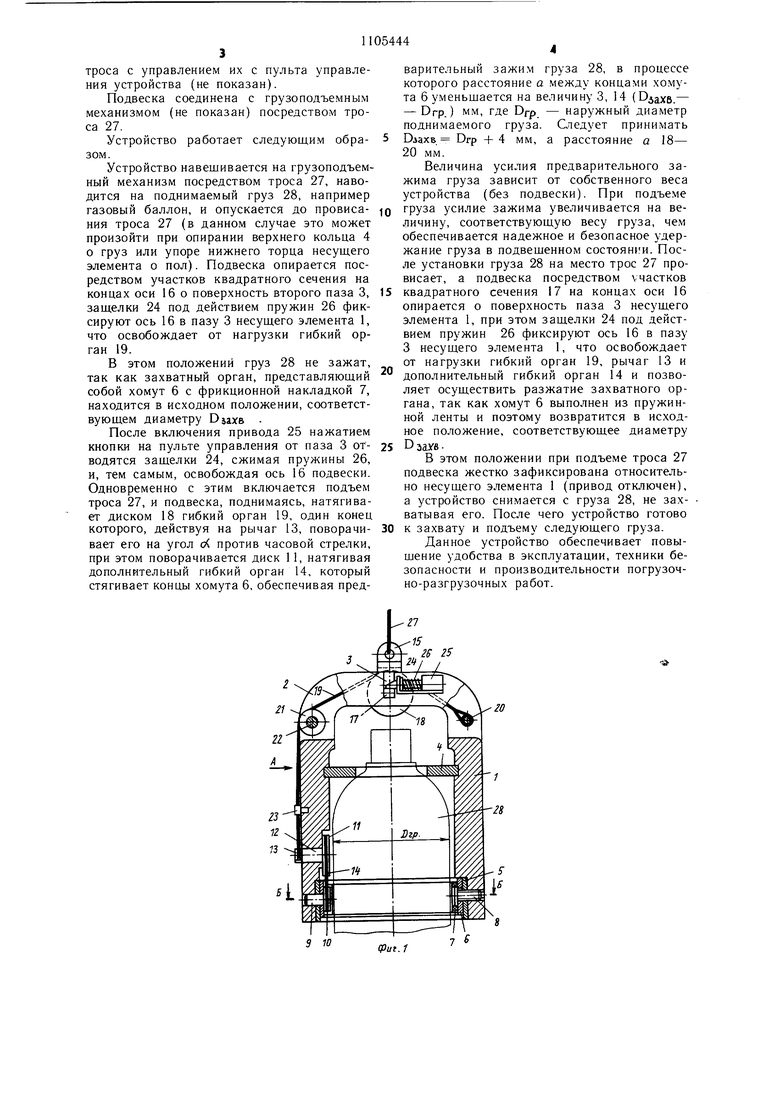
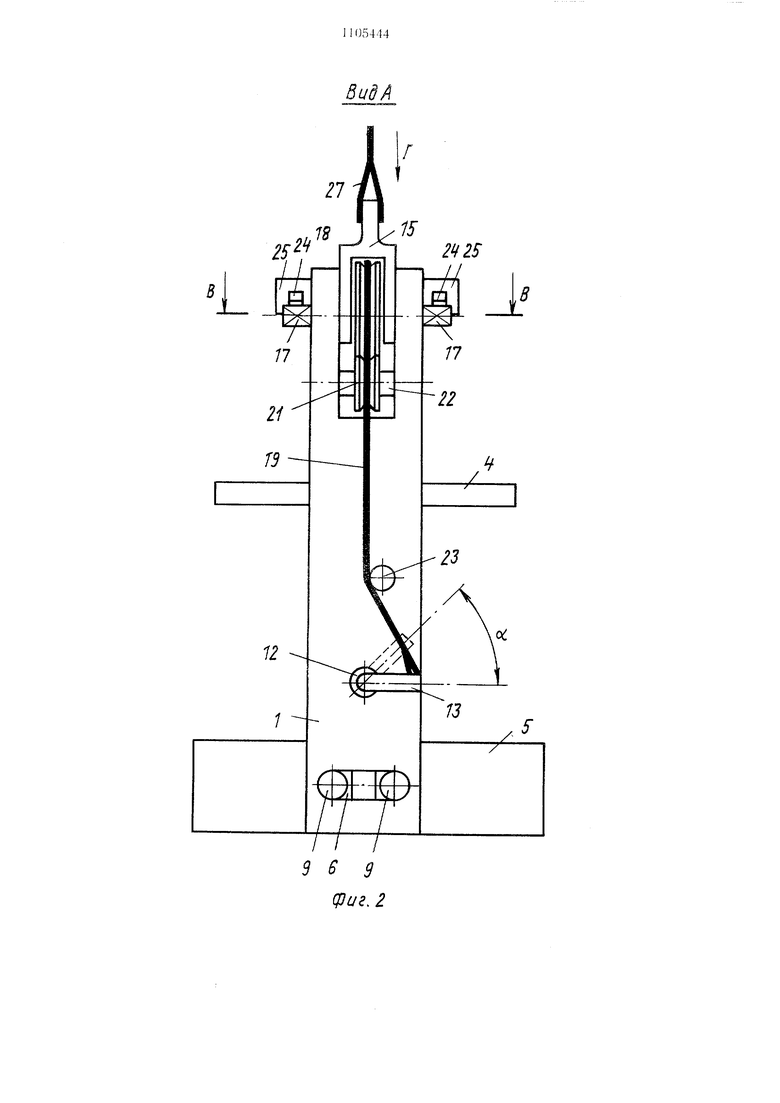
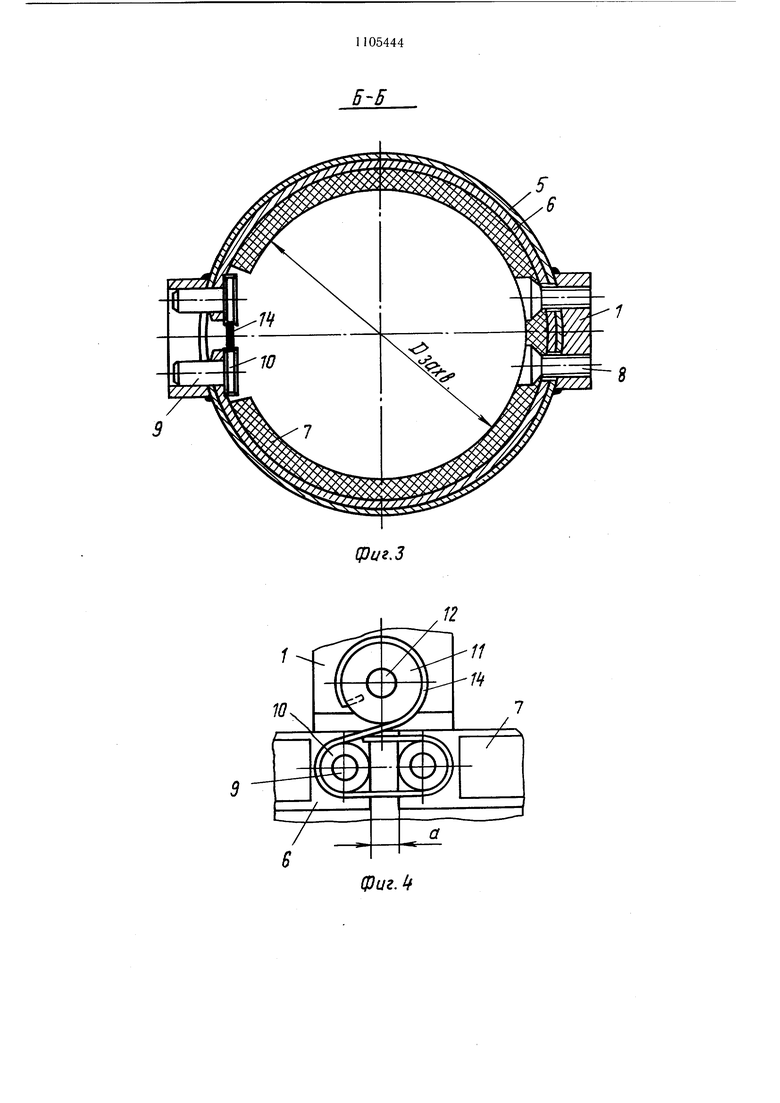
N Изобретение относится к подъемно-транспортной технике, в частности к устройствам для захвата вертикальных цилиндрических грузов. Известно устройство для захвата вертикальных цилиндрических грузов, содержащее несущий элемент с подвеской для соединения с грузоподъемным механизмом, захватный орган, представляющий собой хомут с фрикционной накладкой, приспособление для изменения периметра хомута, включающее закрепленные на его концах ролики и гибкий орган, один конец которого закреплен на несущем элементе 1. Недостатком данного устройства является- неудобство в эксплуатации, так как при наводке и опускании его на груз требуется применение ручного труда. Цель изобретения - повыщение удобства в эксплуатации. Указанная цель достигается тем, что в устройстве для захвата вертикальных цилиндрических, грузов, содержащем несущий элемент с подвеской для соединения с грузоподъемным механизмом, захватный орган, представляющий собой хомут с фрикционной накладкой, приспособление для изменения периметра хомута, включающее закрепленные на его концах ролики и гибкий орган, один конец которого закреплен на несущем элементе, несущий элемент выполнен П-образным со сквозным пазом вдоль его горизонтальной полки и вторым пазом прямоугольной формы, выполненным перпендикулярно первому пазу в верхней центральной части горизонтальной полки, хомут прикреплен к вертикальным стойкам несущего элемента, а подвеска включает размещенный в первом пазу рычаг, выполненный П-образным с отверстиями в вертикальных полках, ось, установленную в упомянутых отверстиях и выполненную с участками квадратного сечения на концах, размещенных во втором пазу несущего элемента, и диск, установленный на оси, причем приспособление для изменения периметра хомута снабжено диском, ось которого установлена на вертикальной стойке несущего элемента со стороны концов хомута перпендикулярно ей, рычагом, закрепленным на оси диска и связанным со вторым концом упомянутого гибкого органа, огибающего диск подв.ески, и дополнительным гибким органом, закрепленным одним концом на диске, частично огибая его и оба ролика, и закрепленным вторым концом на одном из концов хомута, при этом устройство снабжено приводными защелками, размещенными на несущем элементе и подпружиненными относительно него с возможностью взаимодействия с осью подвески. На фиг. 1 изображено устройство для захвата вертикальных цилиндрических грузов, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - схема запасовки дополнительного гибкого органа; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - вид Г на фиг. 2. Устройство для захвата вертикальных цилиндрических грузов содержит П-образный несущий элемент 1, выполненный со сквозным пазом 2 вдоль его горизонтальной полки и вторым пазом 3 прямоугольной формы, выполненным перпендикулярно первому, два кольца жесткости 4 и 5, прикрепленный к вертикальным стойкам несуц его элемента 1 захватный орган, представляющий собой хомут 6 с фрикционной накладкой 7 (хомут 6 представляет собой пружинную ленту толщиной до 2 мм, а фрикционная накладка 7 - разрезное кольцо, выполненное из эластичного материала, например резины). Хомут 6 и фрикционная накладка 7 жестко скреплены друг с другом и прикреплены в своей средней части к вертикальной стойке посредством двух крепежных элементов 8,а на концах хомута 6 жестко закреплены два пальца 9, на концах которых установлены два ролика 10, которые являются элементами приспособления для из.менения периметра хомута 6. Данное приспособление включает также диск 11, ось которого 12 установлена на вертикальной стойке несущего элемента 1 со стороны концов хомута перпендикулярно ей, рычаг 13,закрепленный на оси 12 диска 11, и дополнительный гибкий орган 14, закрепленный одним концом на диске 11, частично огибая его и оба ролика 10, и закрепленный вторым концом на одном из концов хомута 6. Несущий элемент 1 выполнен с подвеской для соединения с грузоподъемным механизмом, включающей размещенный в первом пазу 2 рычаг 15,-выполненный П-образным с отверстиями в вертикальных полках, ось 16, установленную в упомянутых отверстиях и выполненную с участками квадратного сечения 17 на концах, размещенных во втором пазу 3 несущего элемента 1, и диск 18, установленный на оси 16. Устройство снабжено также гибким органом 19, один конец которого закреплен на несущем элементе 1 посредством петли на шарнире 20, затем огибает диск 18 подвески, ролик 21, установленный на оси 22, ролик 23, и вторым концом закреплен на рычаге 13 приспособления для изменения периметра хомута о. Устройство снабжено также двумя защелками 24 с приводом 25, размещенными на горизонтальной полке несущего эле.мента 1 и подпружиненными относительно него посредством пружин 26 с возможностью взаимодействия с участками квадратного сечения 17 на концах оси 16. Привод 25 может быть выполнен, например, в виде электромагнитной катушки или натяжного троса с управлением их с пульта управления устройства (не показан). Подвеска соединена с грузоподъемным механизмом (не показан) посредством троса 27. Устройство работает следующим образом. Устройство навешивается на грузоподъемный механизм посредством троса 27, наводится на поднимаемый груз 28, например газовый баллон, и опускается до провисания троса 27 (в данном случае это может произойти при опирании верхнего кольца 4 0 груз или упоре нижнего торца несущего элемента о пол). Подвеска опирается посредством участков квадратного сечения на концах оси 16 о поверхность второго паза 3, защелки 24 под действием пружин 26 фиксиру ют ось 16 в пазу 3 несущего элемента 1, что освобождает от нагрузки гибкий орган 19. В этом положений груз 28 не зажат, так как захватный орган, представляющий собой хомут 6 с фрикционной накладкой 7, находится в исходном положении, соответствующем диаметру DUXB После включения привода 25 нажатием кнопки на пульте управления от паза 3 отводятся защелки 24, сжимая пружины 26, и, тем самым, освобождая ось 16 подвески. Одновременно с этим включается подъем троса 27, и подвеска, поднимаясь, натягивает диском 18 гибкий орган 19, один конец которого, действуя на рычаг 13, поворачивает его на угол сК против часовой стрелки. при этом поворачивается диск 11, натягивая дополнительный гибкий орган 14, который стягивает концы хомута 6, обеспечивая предварительный зажим груза 28, в процессе которого расстояние а между концами хомута 6 уменьшается на величину 3, 14 (.- - Drp.) мм, где Drp - наружный диаметр поднимаемого груза. Следует принимать DiaxB Drp +4 мм, а расстояние а 18- 20 мм. Величина усилия предварительного зажима груза зависит от собственного веса устройства (без подвески). При подъеме груза усилие зажима увеличивается на величину, соответствующую весу груза, чем обеспечивается надежное и безопасное удержание груза в подвешенном состоянии. После установки груза 28 на место трос 27 провисает, а подвеска посредством участков квадратного сечения 17 на концах оси 16 опирается о поверхность паза 3 несущего элемента 1, при этом защелки 24 под действием пружин 26 фиксируют ось 16 в пазу 3 несущего элемента 1, что освобождает от нагрузки гибкий орган 19, рычаг 13 и дополнительный гибкий орган 14 и позволяет осуществить разжатие захватного органа, так как хомут 6 выполнен из пружинной ленты и поэтому возвратится в исходное положение, соответствующее диаметру ОзазсвВ этом положении при подъеме троса 27 подвеска жестко зафиксирована относительно несущего элемента 1 (привод отключен), а устройство снимается с груза 28, не захватывая его. После чего устройство готово к захвату и подъему следующего груза, Данное устройство обеспечивает повыщение удобства в эксплуатации, техники безопасности и производительности погрузочно-разгрузочных работ.
В
Cpu,3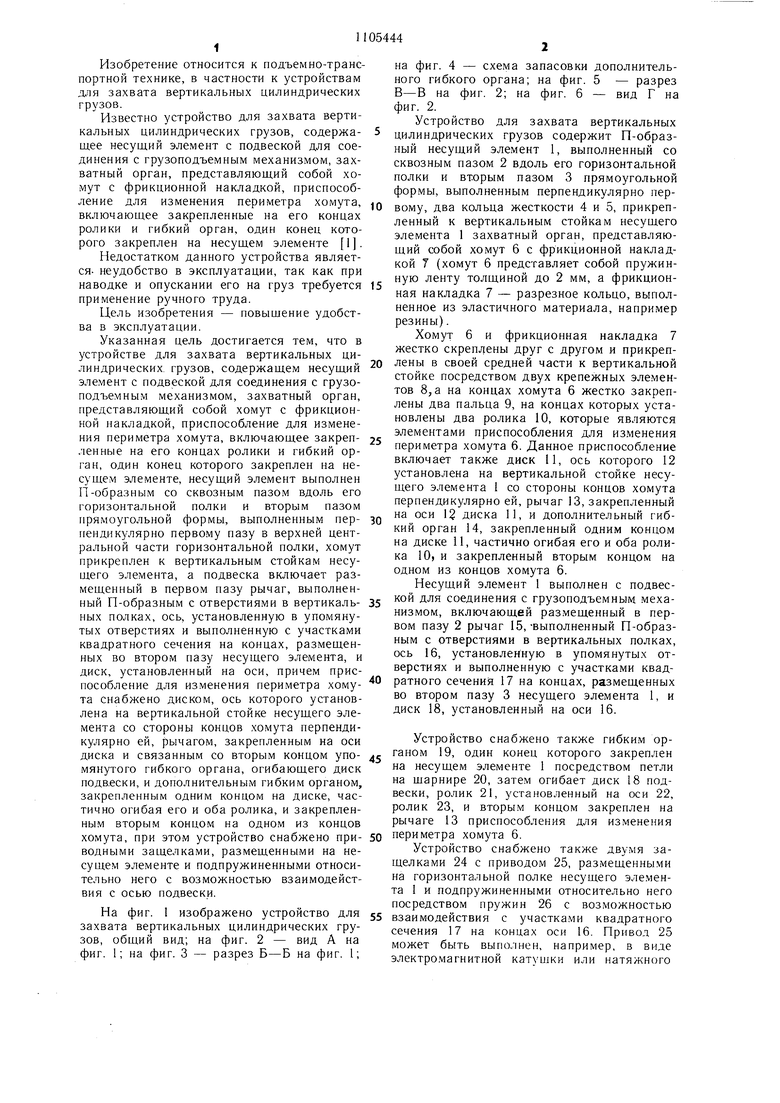
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Захват для изделий | 1979 |
|
SU918246A1 |
| Склад для хранения штучных грузов | 1985 |
|
SU1324958A1 |
| Захват-кантователь для контейнеров с цапфами | 1982 |
|
SU1066934A1 |
| Захватное устройство | 1982 |
|
SU1055722A1 |
| НАВЕСНОЕ ВИБРАЦИОННОЕ УСТРОЙСТВО ДЛЯ ВОЗДЕЙСТВИЯ НА ГРУЗЫ В ВАГОНЕ-ХОППЕРЕ | 1992 |
|
RU2021962C1 |
| Механизм управления захватным устройством для контейнеров | 1985 |
|
SU1421670A1 |
| Захват для цилиндрических грузов | 1982 |
|
SU1089032A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Захват-кантователь для цилиндрических грузов | 1981 |
|
SU1006357A1 |

УСТРОЙСТВО ДЛЯ ЗАХВАТА ВЕРТИКАЛЬНЫХ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ, содержащее несущий элемент с подвеской для соединения с грузоподъемным механизмом, захватный орган, представляющий собой хомут с фрикционной накладкой, приспособление для изменения периметра хомута, включающее закрепленные на его концах ролики и гибкий орган, один конец которого закреплен на несущем элементе, отличающееся тем, что, с целью повышения удобства в эксплуатации, несущий элемент выполнен П-образным со сквозным пазом вдоль его горизонтальной полки и вторым пазом прямоугольной формы, выполненным перпендикулярно первому пазу в верхней центральной части горизонтальной полки, хомут прикреплен к вертикальным стойкам несущего элемента, а подвеска включает размещенный в первом пазу рычаг, выполненный П-образным с отверстиями в вертикальных полках, ось, установленную в упомянутых отверстиях и выполненную с участками квадратного сечения на концах, размещенных во втором пазу несущего элемента, и диск, установленный на оси, причем приспособление для изменения периметра хомута снабжено диском, ось которого установлена на вертикальной стойке несущего элемента со стороны концов хомута перпендикулярно ей, рычагом, закрепленным на оси диска и связанным со вторым концом упомянутого гибкого органа, огибающего диск подвески, и дополнительным гибким органом, закрепленным одним концом на диске, частично огибая его и оба ролика, (Л и закрепленным вторым концом на одном из концов хомута, при этом устройство снабжено приводными защелками, размещенными на несущем элементе и подпружиненными относительно него с возможностью взаимодействия с осью подвески.
фиг. it
B-S
/ 1920
/ I //
5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват для цилиндрических грузов | 1973 |
|
SU485945A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
