4
ГО
О
4j
о
Изобретение относится к грузозахватным ус|тройствам.
Целью изобретения является упрощение конструкции устройства.
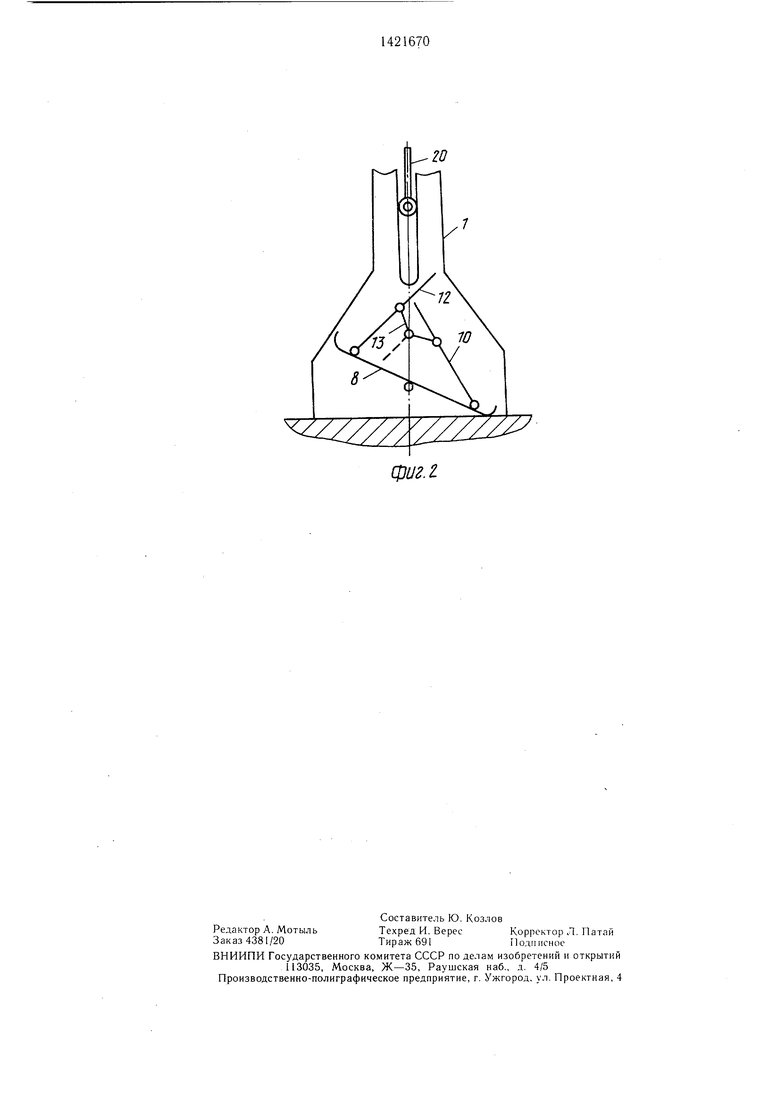
На фиг. 1 показан механизм управления, общий вид; на фиг. 2 - то же, исходное положение.
Механизм управления захватным устройством для контейнеров содержит корпус 1, установленный на раме 2 захватного устройства для контейнеров и установленный в корпусе 1 управляющий элемент в виде груза 3 с осью 4, концб которой размещены в пазах 5, выполненных в корпусе 1. Груз 3 г}осредством гибкой тяги 6 соединен с под- йеской грузоподъемного механизма.
. В. корпусе 1 посредством оси 7 установлено коромысло 8 с загнутыми вверх концами 9. На плечах коромысла 8 щарнирно закреплены нижними концами направляющие 10. Верхние концы направляющих с шар- нирно устано1вленными на них с помощью осей 11 откидными пластинами 12 щарнирно закреплены на двуплечем рычаге 13. Послед- ний жестко установлен на приводном валу 14 соединенном посредством передаточных звеньев 15 и 16, тяг 17 и талрепов 18 с захватными органами 19. На оси 4 установлен качающийся рычаг 20 с роликом 21 на его конце.
Механизм управления работает следующим образом.
При опускании захватного устройства на контейнер захватные органы 19 находятся в открытом положении, а механизм управления находится в исходном состоянии (фиг. 2). После захода захватных органов 19 в отверстия угловых фитингов контейнера ка- чающийся рычаг 20 под собственным весом и весом груза 3 начинает опускаться вниз по пазам корпуса 1I до соприкосновения ролика 21 с верхней откидной пластиной 12. Ролик 21, перемещаясь по направляющей 10, отклоняет нижнюю часть рычага 20 в сторону края 9 коромысла 8 до упора с ним. В результате край коромысла 8 опускается до упора с основанием корпуса 1. Поворот коромысла 8 через направляющие 10 и дву- плечий рычаг 13 передается на вал 14, который посредством передаточных звеньев 15 и 16 соверщает поворот захватных органов 19 на угол 90°. Происходит застропка контейнера. Во время опускания края коромысла 8 вниз откидные пластины 12 меняются местами и ранее нижняя пластина устанавливается над верхней.
При подъеме устройства с контейнером рычаг 20, двигаясь вверх, взаимодействует роликом 21 с откидной пластиной 12. Отклонив в сторону пластину 12, ролик 21 вы- ходит Из-под нее и вместе с рычагом 20 ус0
5
5
0 . 0
танавливается в исходное положение, а пластина 12 под действием собственного веса возвращается в прежнее положение.
При отстропке контейнера качающийся рычаг 20, взаимодействуя роликами 21 с откидной пластиной 12, установивщейся вместе с соответствующей направляющей в верхнем положении, доходит до поднятого края 9 коромысла 8, упираясь в него. Рычаг 20 с помощью груза 3 и собственного веса опускает поднятый край коромысла 8 до упора в основание корпуса 1. При этом поворот коромысла 8 передается с помощью на- правляющих 8 и двуплечего рычага 13 на вал 14.
При отклонении коромысла в обратную сторону откидные пластины 17 вновь меняются местами. Захватные органы 19 поворачиваются в обратную сторону, произодя от- стропку контейнера. При подъеме высвободившегося захватного устройства качающийся рычаг 20 роликом 21 отклоняет перекрывающую откидную пластину 12 и устанавливается, как и пластина 12, в исходное положение.
При неполном заходе хотя бы одного из захватных органов 19 в отверстия фитингов контейнера усилие, передаваемое от них на коромысло 8, не позволит рычагу 20 опустить приподнятый край коромысла 8 вниз, исключая срабатывание предлагаемого механизма.
Формула изобретения
Механизм управления захватным устройством для контейнеров, содержащий закрепляемое на несущем элементе захватного устройства с возможностью перемещения управляющее приспособление, включающее в себя рычаг и соединенный с ним груз, прикрепленную к грузу гибкую тягу, соединяемую с подвеской грузоподъемного механизма, закрепляемый на несущем элементе захватного устройства приводной вал для захватных органов устройства и приспособление для фиксации положения вала, отличающийся тем, что, с целью упропаения конструкции путем исключения подвода энергии от внещних источников, приспособление для фиксации положения вала представляет собой установленное в закрепленном на несущем элементе корпусе коромысло с загнутыми вверх концами, и жестко закрепленный на приводном валу двуплечий рычаг с щар- нирно-закрепленными на нем наклонными направляющими, верхние концы которых снабжены откидными пластинами, а нижние шарнирно соединены с коромыслом, при этом рычаг управляющего элемента соединен с грузом щарнирно и снабжен роликом на конце для взаимодействия с направляющими и коромыслами.
го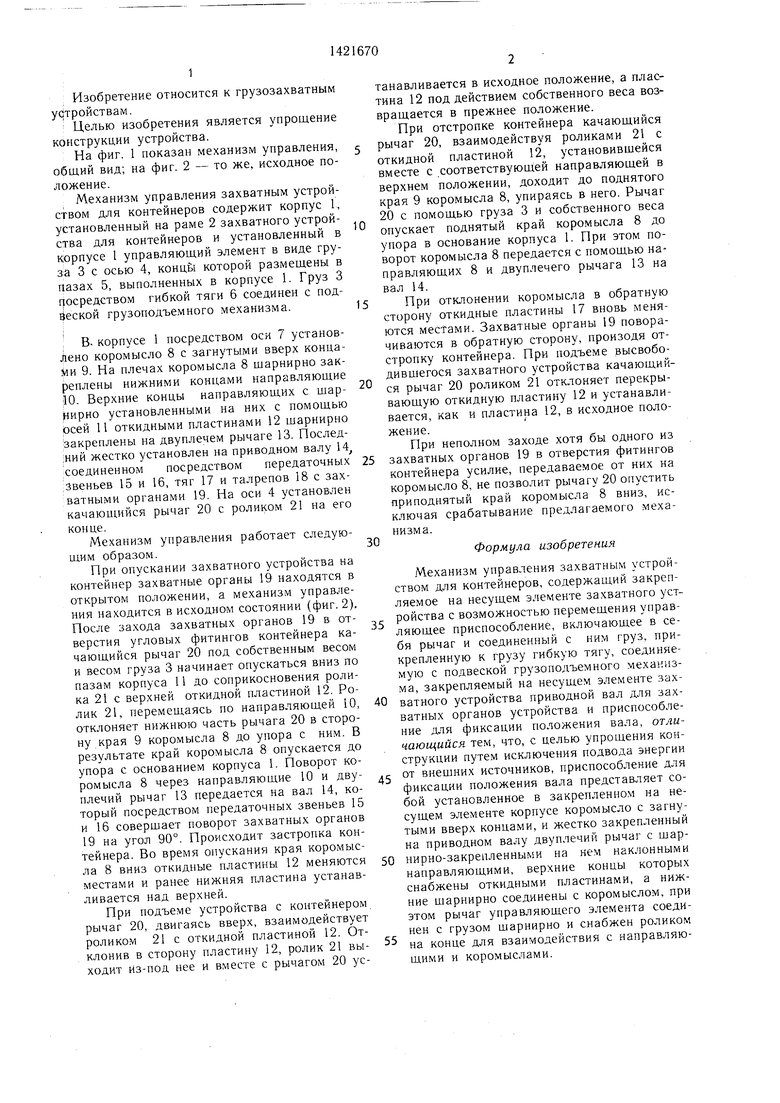
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Устройство для натяжения,соединения и отрезки обвязочных лент из синтетического материала | 1982 |
|
SU1134117A3 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| Транспортное средство | 1984 |
|
SU1152821A1 |
| Устройство для захвата и транспортировки контейнеров по подвесной дороге | 1973 |
|
SU553189A1 |
| ШВЕЙНАЯ ГОЛОВКА | 1972 |
|
SU328235A1 |
| Укладчик плит | 1977 |
|
SU753974A2 |
| Копировально-фрезерный станок | 1983 |
|
SU1117213A1 |
| Станок для подготовки кромок труб под сварку | 1983 |
|
SU1155381A1 |
| Устройство для перемещения тарноштучных грузов | 1972 |
|
SU503804A1 |
Изобретение относится к нол ьемно-тран- спортш)й технике, в :астност:- к .ме.ханнз.мам управления захватным стройство% для контейнеров. Целью изобретения является упрощение конструкц.чи. Ме.ханиз.м у.иравления состоит из несунам о э.ле.мента 2, на котором разметен .ехан1 3 ; привода захват; ых элементов. Механиз.м пригвода установлен в корпусе 1 if состоит из коромысла 8, закрепленного с воз.можностью качания, которое осуществляется посредством качающегося рычага 20. Верхняя часть рычага 20 установлена с возможнос1ью вертикального перемещения в пазах корпуса I. а нижняя часть рычага 20 и.меет свободу нере.мещения и оказывает понеременпое воздействие на плечи коромысла 8. На плечах коромысл нарнир- но закреплены нижним конном направляю- н|ие 10, по которым осуществляется передви- нижне1 о копна рычага 20. Верхн.ио концы направляющих К), снабженные 1-об- откидны.и1 пластинами 12, нарнир- но соединены с двуплечим рычаго.м 13. ко установленным на валу 14. который евя- зан с захватны И элементами посредством С стемь тяг и пр В; ДНЬ1Х рьГчагов. 2 и.т
иг.1
| Захватное устройство для контейнеров | 1979 |
|
SU802163A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
