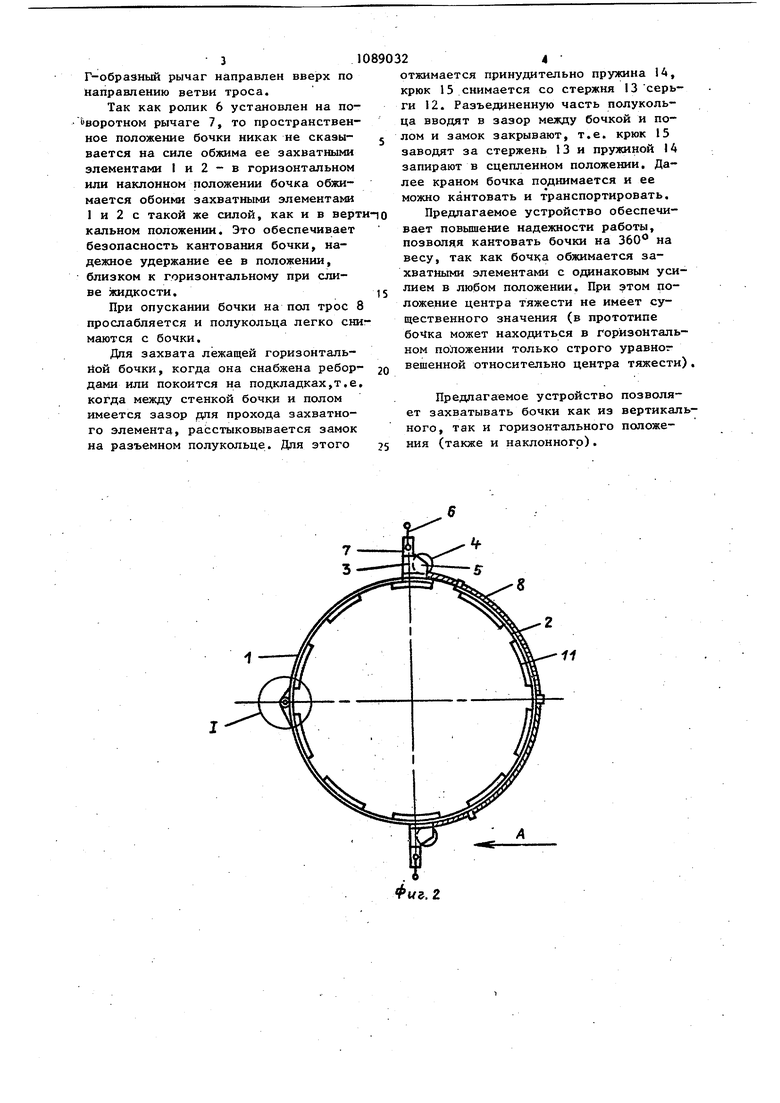
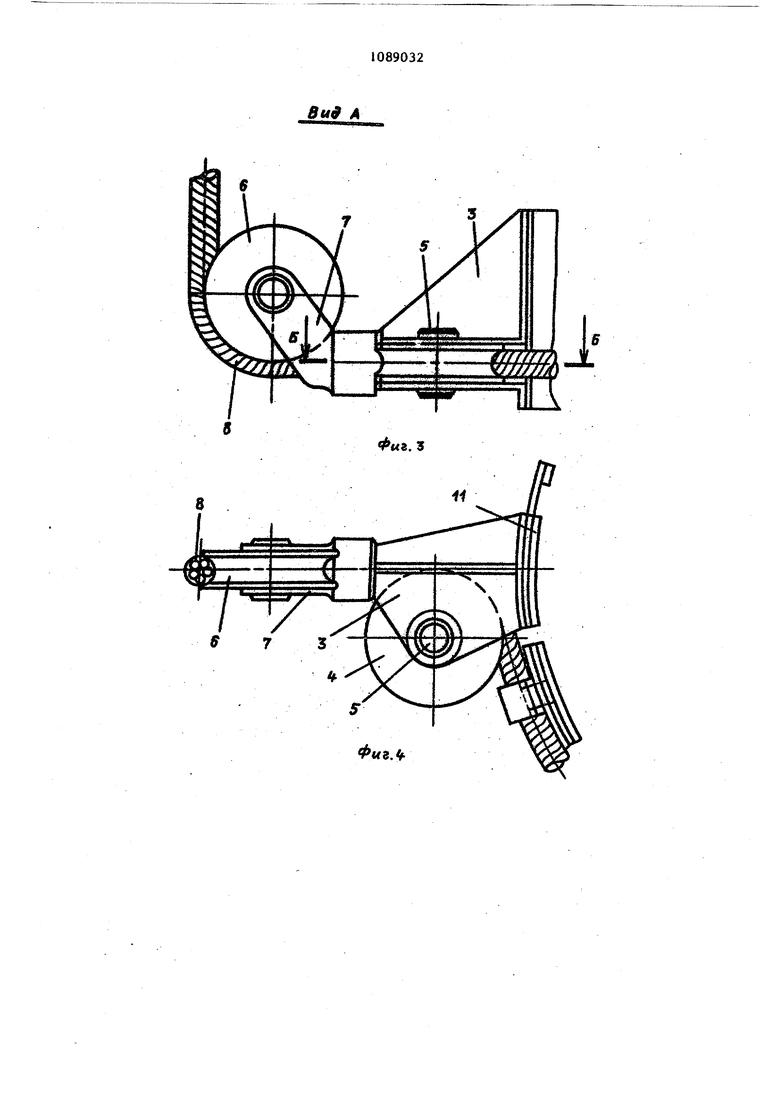
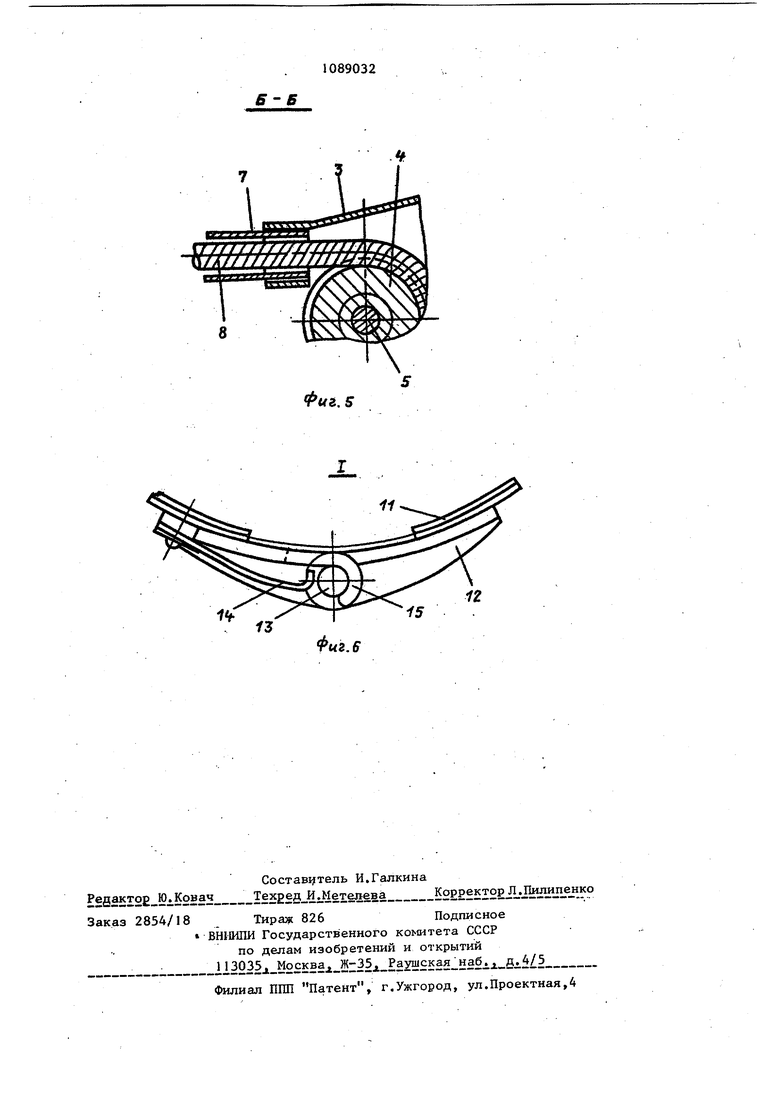
Изобретение относится к подъемнотранспортной технике, в частности к захватам для цилиндрических грузов, например металлических бочек. Известен захват для цилиндрических грузов, содержащий дугообразные захватные элементы с разной длиной дуги, ролики, размещеш ые попарно на концах захватного элемента с большей длиной дуги, и огибающий ролики и за хватный элемент с меньшей длиной дуги трос, закрепленный на траверсе, имеющей приспособление для навешивания на грузоподъемный механизм Г1 3. Однако данньй захват характризуется недостаточно высокой надежностью в работе. Цель изобретения - повышение надежности работы устройства. Указанная цель достигается тем, что захват для цилиндрических грузов, содержащий дугообразные захватные элементы с разной длиной дуги, ролики, размещенные попарно на концах захватного элемента с большей длиной дуги, и огибающий ролики и за хватный элемент с меньшей длиной дуги трос, закрепленный на траверсеi имеющей приспособление для навешиваHii i на грузоподъемный механизм, снаб жен закрепленными на концах первого захватного элемента кронштейнами, уста новленными на каждом из них с возможнос тью вращения вокруг оси, расположенной перпендикулярно вертикальной оси симметрии траверсы, рычагами, на каж ;омиэ которых установлен один из каждой па ры роликов, оси вторых из каждой пары которых закреплены на соответству щих кронштейнах параллельно вертикал ной оси симметрии траверсы. На фиг. 1 изображен захват в рабо чем положении, общий вид ; на фиг.2 то же, вид в плане; на фиг.З - вид А на фиг.2; на фиг.4 - вид сверху на фиг.З; на фиг.З - разрез Б-Б на фиг.З; на фиг, 6 - узел Г на г.2 .(замок) . Захват содержит дугообразньп захватный элемент 1 с большей длиной дуги и дугообразный захватный элемент 2 с меньшей длиной дуги, На концах захватного элемента 1 жестко закреплены кронштейны 3, на каждом из которых установлен ролик 4 с возможностью вращения на оси 5, расположен ной параллельно вертикальной оси симметрии траверсы. Ролик 6 каждой пары смонтирован на оси, установленной на рычаге 7, закрепленном на кронштейне 3 с возможностью вращения вокруг оси, расположенной перпендикулярно вертикальной оси симметрии траверсы. Ролики 4 и 6, а также захватный элемент 2 охвачены тросом 8; ролики охвачены по дуге сектора 90, а захватный элемент 2 - по всей поверхности. Ветви троса могут быТь закреплены на концах захватного элемента 2, концы троса 8 закреплены на траверсе 9, имеющей приспособления для навешивания на грузоподъемный механизм, например скобу 10, На захватных элементах 1 и 2 закреплены фрикционные накладки 11, а в том случае, когда материал, из которого изготовлены захватные элементы 1 и 2, обладает хорошими фрикционными свойствами, накладок 11 может не быть. Захватный элемент 1 (или элемент 2, когда концы ветвей троса заделаны на этом захватном элементе) выполнен из двух частей с разъемом. Части захватного элемента 1 по разъему связаны между собой замком (фиг,6), выполненным в виде серьги 12 с поперечно установленным стержнем 13, закрепленной на одной части захватного элемента 2, и подпружиненного пружиной 14 крюка 15 охватывающего стержень 13 и закрепленногр на другой части захватного элемента 1 , Устройство работает следующим образом. Траверса 9 навешивается за скобу 10 на крюк, например, грузоподъемного крана. Захватные элементы 1 и 2 на- деваются на стоящую вертикально бочку приблизительно на уровне ее центра тяжести. Кран натягивает перекинутые через ролики 4 и 6 ветви троса 8, в результате чего захватные элементы сжимают бочку с силой, прямо пропорциональной ее весу (с содержимым). При дальнейшем подъеме бочка оказывается на весу, ее можно транспортировать или кантовать в воздухе вокруг горизонтальной оси. При кантовании бочка совместно с захватными элементами 1 и 2, кронштейнами 3 и роликами 4 вращается на рычагах 7 как на поперечной оси, рычаги же вместе с роликами 6 i остаются при этом неподвижными Г-образный рычаг направлен вверх по направлению ветви троса.
Так как ролик 6 установлен на поЬворотном рычаге 7, то пространственное положение бочки никак не скаэывается на силе обжима ее захватными элементами I и 2 - в горизонтальном или наклонном положении бочка обжимается обоими захватными элементами 1 и 2 с такой же силой, как и в верт кальном положении. Это обеспечивает безопасность кантования бочки, надежное удержание ее в положении, близком к горизонтальному при сливе жидкости.
При опускании бочки на пол трос 8 прослабляется и полукольца легко снимаются с бочки.
Доя захвата лежащей горизонтальйой бочки, когда она снабжена ребордами или покоится на подкладках,т.е. когда между стенкой бочки и полом имеется зазор для прохода захватного элемента, расстыковывается замок на разъемном полукольце. Для этого
отжимается принудительно пружина 14, крюк 15 снимается со стержня 13 серьги 12. Разъеда1ненную часть полукольца вводят в зазор между бочкой и полом и замок закрывают, т.е. крюк 15 заводят за стержень 13 и пружиной 14 запирают в сцепленном положении. Далее краном бочка поднимается и ее можно кантовать и транспортировать.
Предлагаемое устройство обеспечивает повышение надежности работы, позволяя кантовать бочки на 360 на весу, так как бочка обжимается захватными элементами с одинаковым усилием в любом положении. При этом положение центра тяжести не имеет существенного значения (в прототипе боЧка может находиться в горизонтальном полюжении только строго уравног вешенной относительно центра тяжести
Предлагаемое устройство позволяет захватывать бочки как из вертикалного, так и горизонтального положения (также и наклонного).
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для цилиндрических грузов | 1987 |
|
SU1481185A2 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ЦИЛИНДРИЧЕСКИХ И БОЧКООБРАЗНЫХ ГРУЗОВ | 1973 |
|
SU367038A1 |
| Захват для цилиндрических и бочкообразных грузов | 1980 |
|
SU935437A1 |
| Грузозахватное устройство | 1983 |
|
SU1134524A1 |
| Захват для цилиндрических грузов | 1985 |
|
SU1281499A1 |
| Грузозахватное устройство | 1983 |
|
SU1118600A1 |
| Захватное устройство для труб | 1979 |
|
SU850543A1 |
| Захватное устройство | 1987 |
|
SU1493582A1 |
| КАНТОВАТЕЛЬ ДЛЯ БОЧЕК С КОНЦЕВЫМИ ОБРУЧАМИ | 2004 |
|
RU2258659C1 |
| Грузоподъемная траверса | 1979 |
|
SU872434A1 |
ЗАХВАТ ДЛЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ, содержащий дугообразные захватные элементы с разной длиной дуги, ролики, размещенные попарно на концах захватного элемента с большей длиной дуги, и огибающий ролики и за хватный элемент с меньшей длиной дуги трос, закрепленный на траверсе, имеющей приспособление для навешивания на грузоподъемный механизм отличающийся тем, что, с целью повышения надежности работы, он снабжен закрепленными на концах первого захватного элемента крядпптейнами, установленными на каждом из них ; с возможностью вращения вокру оси, расположенной перпендикулярно вертикальной оси симметрии траверсы рычагами , на каждом из которых установлен один из каждой пары роликов, оси вторых из каждой пары которых закреплены на соответствующих кронштейнах параллельно вертикальной оси симметрии траверсы. 00 со о со IsD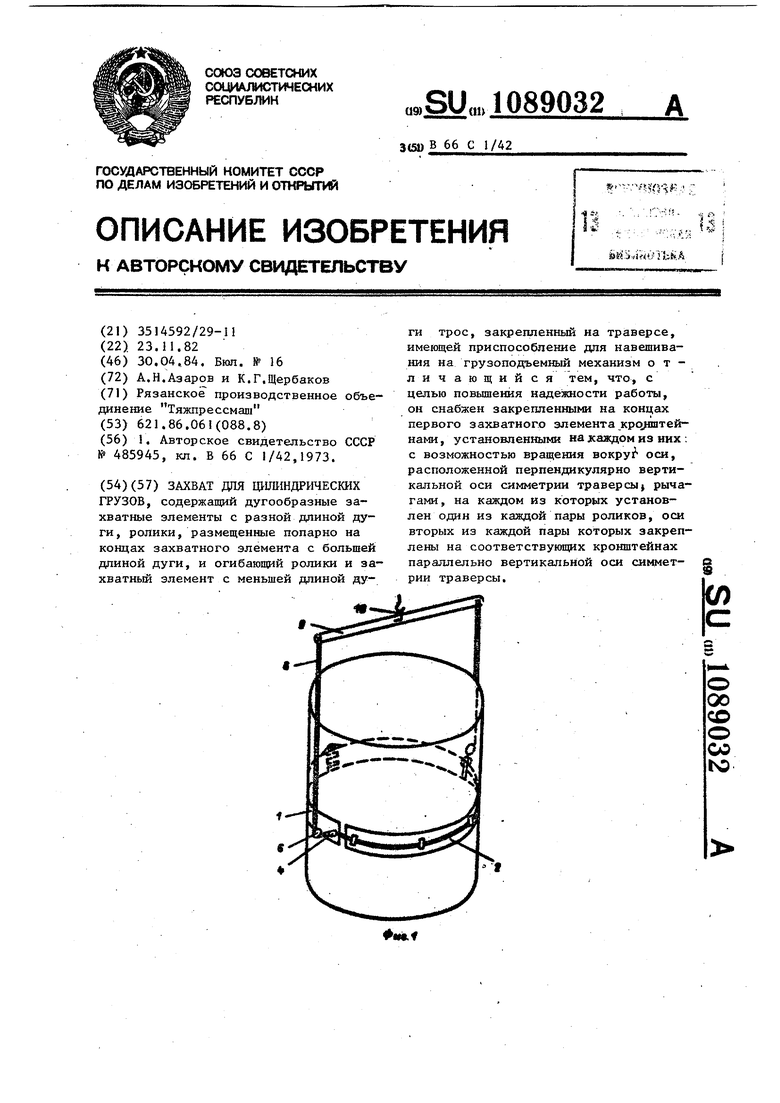
8
Фи.г
Bu9 A
е- Б
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват для цилиндрических грузов | 1973 |
|
SU485945A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
