Изобретение относится к складам для хранения штучных или рассыпных грузов и может быть использовано не только в складском хозяйстве, а также в других отраслях народного хозяйства как погрузочное устройство.
Цель изобретения - повышение надежности.
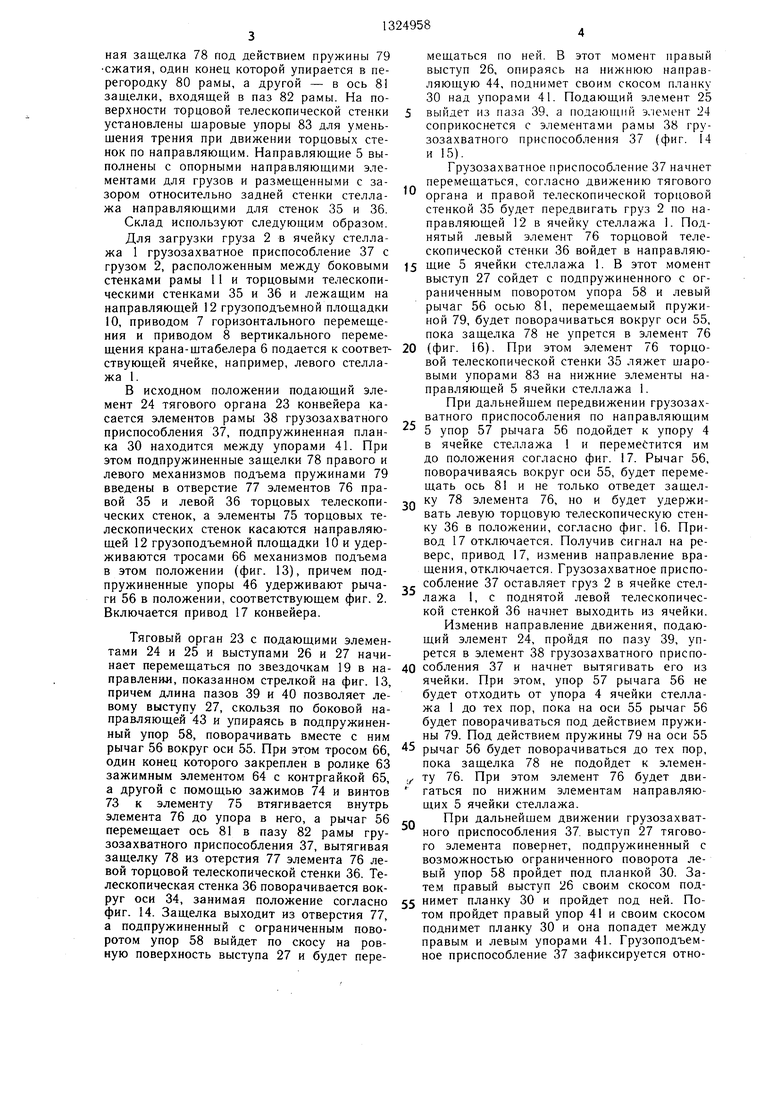
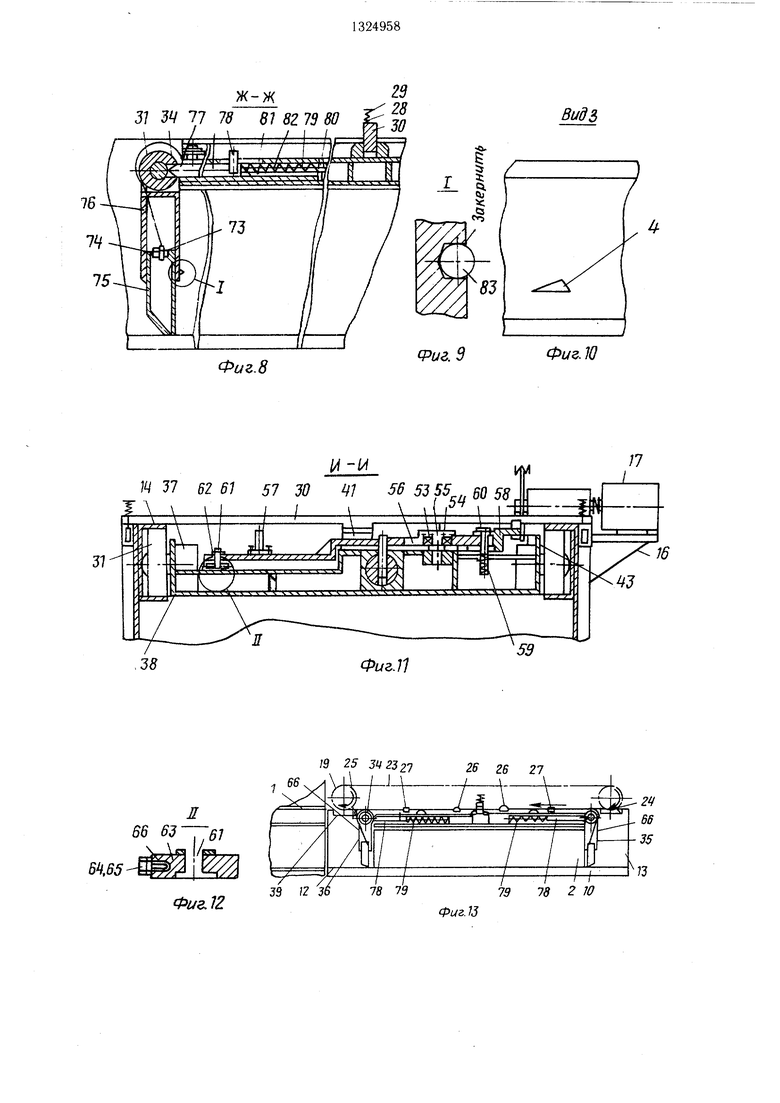
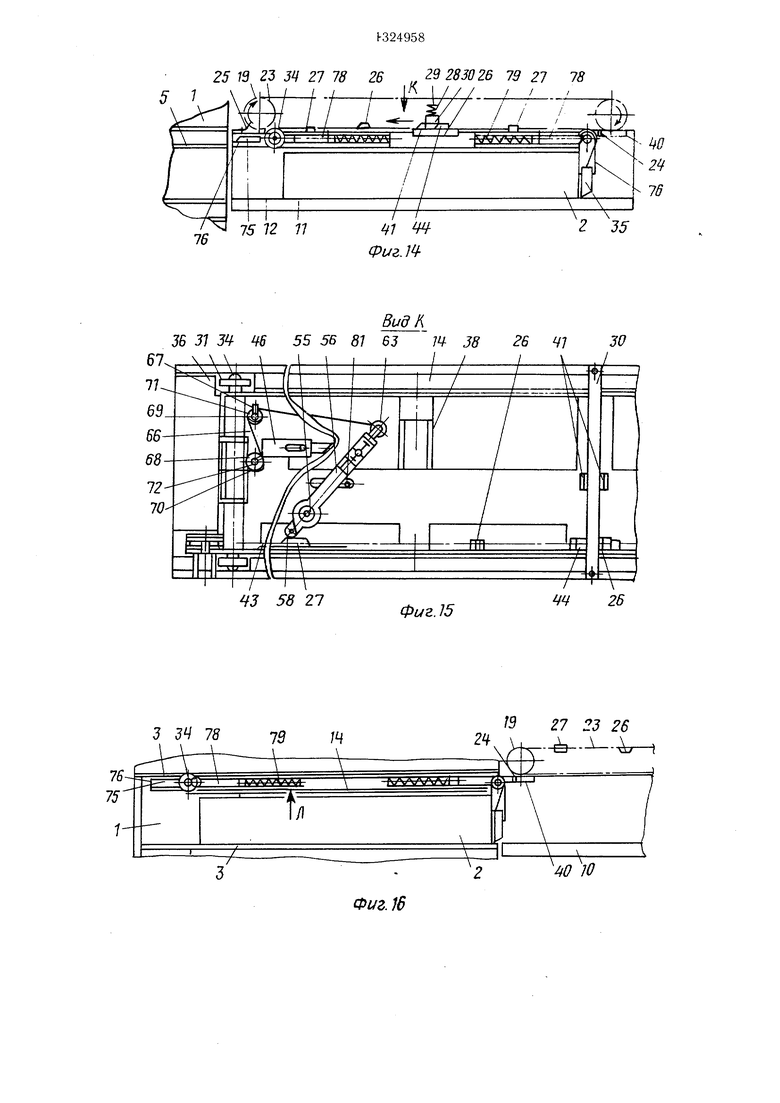
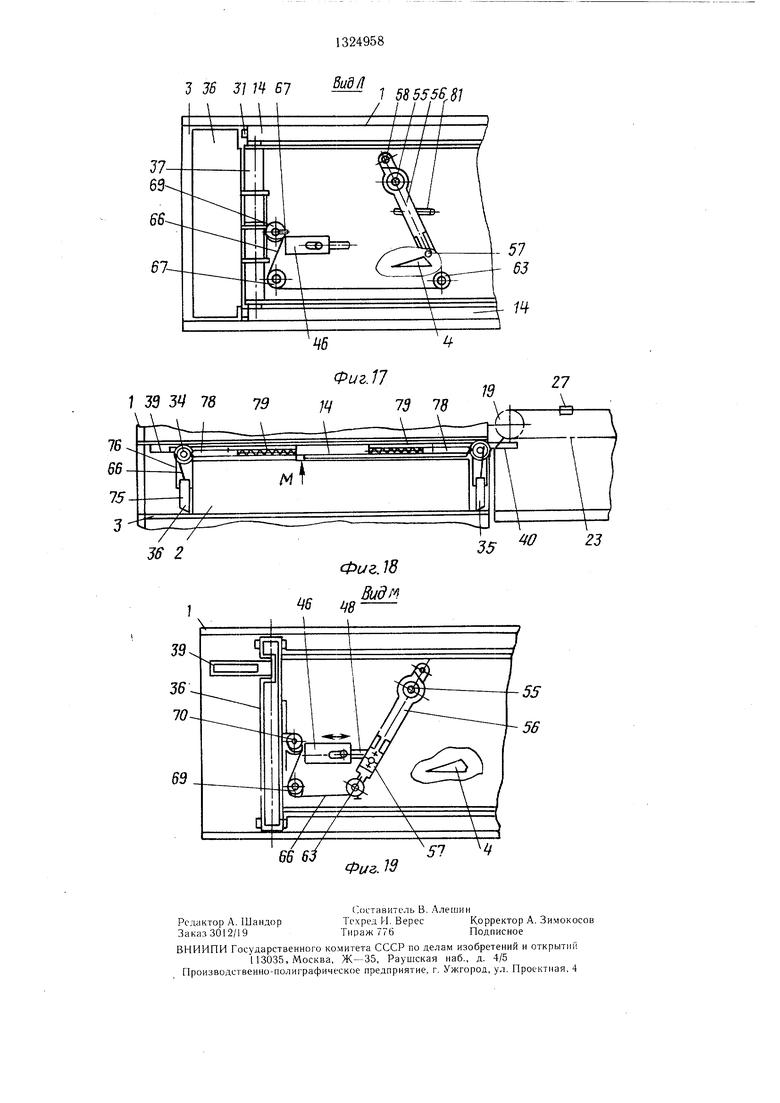
На фиг. 1 схематически показан склад со стеллажами, обслуживаемыми краном- иггабелером с грузоподъемной площадкой и грузозахватным приспособлением, исходное положение; на фиг. 2 - вид А на фиг. 1 (на грузоподъемную площадку с грузозахватным приспособлением, в исходном положении); на фиг. 3 - сечение Б-Б на фиг. 2 (по оСям роликов механизма подъема грузозахватного приспособления); на фиг. 4 - сечение В-В на фиг. 2 (но пазу рамы грузозахватного приспособления и торцовой телескопической стенке); на фиг. 5 - сечение Г-Г на фиг. 2 (по катку и его креплению на оси в раме грузозахватного приспособления); н-а фиг. 6 - сечение Д-Д на фиг. 2 (по подпружиненному упору грузозахватного приспособления); на фиг. 7 - сечение Е-Е на фиг. 2 (вдоль грузозахватного приспособления); на фиг. 8 - сечение Ж-Ж на фиг. 2 (по телескопической торцовой стенке и подпружиненной защелке рамы грузозахватного приспособления); на фиг. 9 - узел I на фиг. 8; (шаровой упор по поверхности торцовой телескопической стенки); на фиг. 10 - вид 3 фиг. 1 (на упор в стеллаже); на фиг. 11 - сечение И-И на фиг. 2 (по рычагу механизма подъема и раме грузозахватного приспособления); на фиг. 12 - узел II на фиг. 11 (на крепление троса к ролику); на фиг. 13 - грузоподъемная площадка с грузозахватным приспособлением,общий вид в исходном положении, вид сбоку; на фиг. 14 - то же, в момент окончания подъема левой торцовой стенки; на фиг. 15 - вид К на фиг. 14 (на положение механизма подъема и упора в ячейке в момент окончания подъема левой торцевой стенки); на фиг. 16 - то же, в момент начала вытягивания грузозахватного приспособления из ячейки без груза; на фиг. 17 - вид Л на фиг. 16 (на положение механизма подъема и упор в ячейке в момент начала вытягивания грузозахватного приспособления из ячейки без груза); на фиг. 18 - то же, в момент окончания опускания торцовой стенки за грузом, находящимся в ячейке, для его изъятия; на фиг. 19 - вид М на фиг. 18 (на положение механизма подъема и упор в ячейке в момент окончания опускания торцовой стенки за грузом, находящимся в ячейке для его изъятия).
Склад состоит из стеллажей 1 с грузом 2, лежащим на направляющих 3. В ячейках склада установлены упоры 4 и направляющие 5, являющиеся элементами стеллажа. Стеллажи обслуживаются краном- штабелером 6, снабженным приводом 7 горизонтального перемещения и приводом 8 ве|5тикального перемещения в направляющих 9 грузоподъемной площадки 10, размещенной перпендикулярно оси прохода.
Грузоподъемная площадка 10 содержит раму 11 с направляющей 12 и боковыми стенками 13, на которых установлены на0 правляющие 14, кронщтейны 15 и 16. На кронщтейнах 15 и 16 размещен конвейер, состоящий из привода 17 с муфтой 18, звездочек 19, установленных на осях 20 и 21 подшипниковых узлов 22, тягового органа 23. На тяговом органе 23 закрепле ны толкатели 24 и 25 и выступы 26 и 27. Пружинами 28, установленными на осях 29, прикрепленных к боковым стенкам, прижаты планки 30 к раме.
В направляющих на боковых стенках ра0 мы грузоподъемной площадки установлены катки 31 на подшипниках 32, закрепленных пружинными упорными кольцами 33 на осях 34. На осях 34, проходящих через правые 35 и левые 36 торцовые телескопические стенки, установлено грузозахватное при5 способление 37, включающее в себя раму 38 с пазами 39 и 40, с упорами 41 и боковыми направляющими 42 и 43, нижние направляющие 44 и подпружиненные упоры 45 и 46. Подпружиненные упоры состоят из корпуса 47, упора 48 со штифтом 49, вхо0 дящим в пазы 50 корпуса, и резьбовой втулки 51, регулирующей величину сжатия пружины 52, упирающейся одним концом в щтифт, а другим - в резьбовую втулку. На раме установлены правые и левые механизмы подъема торцовых телескопи5 ческих стенок.
Механизм подъема и опускания состоит из установленного на подшипнике 53 и закрепленного подпружиненными упорными кольцами 54 на оси 55 рычага 56. На
0 последнем установлен упор 57 и подпружиненный с возможностью ограниченного поворота упор 58, прижатый к рычагу пружиной 59 кручения и поворачивающийся на оси 60 только в сторону, показанную стрелкой. На оси 61, закрепленной на рыча5 ге гайкой 62, установлен ролик 63 с зажатым зажимным элментом 64 с контргайкой 65 тросом 66. Трос 66 проходит через ограничители 67 и 68, не позволяющие ему выйти из канавки роликов 69 и 70, установленных на осях 71 и 72, закреплен0 ных в раме грузозахватного приспособления, а также по торцовой телескопической стенке, и крепится с помощью винтов 73 и зажима 74 к ее элементу 75, входящему во внутреннюю полость ее элемента 76.
Для фиксации положения элемента 76 торцовой телескопической стенки в ней имеется отверстие 77, куда входит подпружинен10
ная защелка 78 под действием пружины 79 сжатия, один конец которой упирается в перегородку 80 рамы, а другой - в ось 81 защелки, входящей в паз 82 рамы. На поверхности торцовой телескопической стенки установлены шаровые упоры 83 для умень- щения трения при движении торцовых стенок по направляющим. Направляющие 5 выполнены с опорными направляющими элементами для грузов и размещенными с зазором относительно задней стенки стеллажа направляющими для стенок 35 и 36.
Склад используют следующим образом.
Для загрузки груза 2 в ячейку стеллажа 1 грузозахватное приспособление 37 с грузом 2, расположенным между боковыми стенками рамы 11 и торцовыми телескопическими стенками 35 и 36 и лежащим на направляющей 12 грузоподъемной площадки 10, приводом 7 горизонтального перемещения и приводом 8 вертикального перемещения крана-щтабелера 6 подается к соответ- 20 ствующей ячейке, например, левого стеллажа 1.
В исходном положении подающий элемент 24 тягового органа 23 конвейера касается элементов рамы 38 грузозахватного
мещаться по ней. В этот момент правый выступ 26, опираясь на нижнюю направляющую 44, поднимет своим скосом планку 30 над упорами 41. Подающий элемент 25 выйдет из паза 39, а подающий элемент 24 соприкоснется с элементами рамы 38 грузозахватного приспособления 37 (фиг. 14 и 15).
Грузозахватное приспособление 37 начнет перемещаться, согласно движению тягового органа и правой телескопической торцовой стенкой 35 будет передвигать груз 2 по направляющей 12 в ячейку стеллажа 1. Поднятый левый элемент 76 торцовой телескопической стенки 36 войдет в направляю- 15 щие 5 ячейки стеллажа 1. В этот момент выступ 27 сойдет с подпружиненного с ограниченным поворотом упора 58 и левый рычаг 56 осью 81, перемещаемый пружиной 79, будет поворачиваться вокруг оси 55, пока защелка 78 не упрется в элемент 76 (фиг. 16). При этом элемент 76 торцовой телескопической стенки 35 ляжет щаро- выми упорами 83 на нижние элементы направляющей 5 ячейки стеллажа 1.
При дальнейщем передвижении грузозахватного приспособления по направляющим
приспособления 37, подпружиненная план- 5 упор 57 рычага 56 подойдет к упору 4
ка 30 находится между упорами 41. При этом подпружиненные защелки 78 правого и левого механизмов подъема пружинами 79 введены в отверстие 77 элементов 76 правой 35 и левой 36 торцовых телескопических стенок, а элементы 75 торцовых телескопических стенок касаются направляющей 12 грузоподъемной площадки 10 и удерживаются тросами 66 механизмов подъема в этом положении (фиг. 13), причем подпружиненные упоры 46 удерживают рычаги 56 в положении, соответствующем фиг. 2. Включается привод 17 конвейера.
30
35
в ячейке стеллажа 1 и переместится им до положения согласно фиг. 17. Рычаг 56, поворачиваясь вокруг оси 55, будет перемещать ось 81 и не только отведет защелку 78 элемента 76, но и будет удерживать левую торцовую телескопическую стенку 36 в положении, согласно фиг. 16. Привод 17 отключается. Получив сигнал на реверс, привод 17, изменив направление вращения, отключается. Грузозахватное приспособление 37 оставляет груз 2 в ячейке стеллажа 1, с поднятой левой телескопической стенкой 36 начнет выходить из ячейки. Изменив направление движения, подающий элемент 24, пройдя по пазу 39, упрется в элемент 38 грузозахватного приспов ячейке стеллажа 1 и переместится им до положения согласно фиг. 17. Рычаг 56, поворачиваясь вокруг оси 55, будет перемещать ось 81 и не только отведет защелку 78 элемента 76, но и будет удерживать левую торцовую телескопическую стенку 36 в положении, согласно фиг. 16. Привод 17 отключается. Получив сигнал на реверс, привод 17, изменив направление вращения, отключается. Грузозахватное приспособление 37 оставляет груз 2 в ячейке стеллажа 1, с поднятой левой телескопической стенкой 36 начнет выходить из ячейки. Изменив направление движения, подающий элемент 24, пройдя по пазу 39, упрется в элемент 38 грузозахватного приспоТяговый орган 23 с подающими элементами 24 и 25 и выступами 26 и 27 начинает перемещаться по звездочкам 19 в на- 40 собления 37 и начнет вытягивать его из правленил, показанном стрелкой на фиг. 13, ячейки. При этом, упор 57 рычага 56 не причем длина пазов 39 и 40 позволяет ле- будет отходить от упора 4 ячейки стелла- вому выступу 27, скользя по боковой на- жа 1 до тех пор, пока на оси 55 рычаг 56 правляющей 43 и упираясь в подпружинен- будет поворачиваться под действием пружи- ный упор 58, поворачивать вместе с ним ны 79. Под действием пружины 79 на оси 55 рычаг 56 вокруг оси 55. При этом тросом 66, рычаг 56 будет поворачиваться до тех пор, один конец которого закреплен в ролике 63 зажимным элементом 64 с контргайкой 65, а другой с помощью зажимов 74 и винтов 73 к элементу 75 втягивается внутрь элемента 76 до упора в него, а рычаг 56 перемещает ось 81 в пазу 82 рамы грузозахватного приспособления 37, вытягивая защелку 78 из отерстия 77 элемента 76 левой торцовой телескопической стенки 36. Телескопическая стенка 36 поворачивается вокпока защелка 78 не подойдет к элемен- , ту 76. При этом элемент 76 будет дви- гаться по нижним элементам направляющих 5 ячейки стеллажа.
При дальнейшем движении грузозахватного приспособления 37. выступ 27 тягового элемента повернет, подпружиненный с возможностью ограниченного поворота левый упор 58 пройдет под планкой 30. Затем правый выступ 26 своим скосом под50
руг оси 34, занимая положение согласно55 имет планку 30 и пройдет под ней. По- фиг. 14. Защелка выходит из отверстия 77,том пройдет правый упор 41 и своим скосом а подпружиненный с ограниченным пово-поднимет планку 30 и она попадет между ротом упор 58 выйдет по скосу на ров-правым и левым упорами 41. Грузоподъемную поверхность выступа 27 и будет пере-ное приспособление 37 зафиксируется отно0
0
мещаться по ней. В этот момент правый выступ 26, опираясь на нижнюю направляющую 44, поднимет своим скосом планку 30 над упорами 41. Подающий элемент 25 выйдет из паза 39, а подающий элемент 24 соприкоснется с элементами рамы 38 грузозахватного приспособления 37 (фиг. 14 и 15).
Грузозахватное приспособление 37 начнет перемещаться, согласно движению тягового органа и правой телескопической торцовой стенкой 35 будет передвигать груз 2 по направляющей 12 в ячейку стеллажа 1. Поднятый левый элемент 76 торцовой телескопической стенки 36 войдет в направляю- 5 щие 5 ячейки стеллажа 1. В этот момент выступ 27 сойдет с подпружиненного с ограниченным поворотом упора 58 и левый рычаг 56 осью 81, перемещаемый пружиной 79, будет поворачиваться вокруг оси 55, пока защелка 78 не упрется в элемент 76 (фиг. 16). При этом элемент 76 торцовой телескопической стенки 35 ляжет щаро- выми упорами 83 на нижние элементы направляющей 5 ячейки стеллажа 1.
При дальнейщем передвижении грузозахватного приспособления по направляющим
5 упор 57 рычага 56 подойдет к упору 4
5 упор 57 рычага 56 подойдет к упору 4
30
35
в ячейке стеллажа 1 и переместится им до положения согласно фиг. 17. Рычаг 56, поворачиваясь вокруг оси 55, будет перемещать ось 81 и не только отведет защелку 78 элемента 76, но и будет удерживать левую торцовую телескопическую стенку 36 в положении, согласно фиг. 16. Привод 17 отключается. Получив сигнал на реверс, привод 17, изменив направление вращения, отключается. Грузозахватное приспособление 37 оставляет груз 2 в ячейке стеллажа 1, с поднятой левой телескопической стенкой 36 начнет выходить из ячейки. Изменив направление движения, подающий элемент 24, пройдя по пазу 39, упрется в элемент 38 грузозахватного приспо40 собления 37 и начнет вытягивать его из ячейки. При этом, упор 57 рычага 56 не будет отходить от упора 4 ячейки стелла- жа 1 до тех пор, пока на оси 55 рычаг 56 будет поворачиваться под действием пружи- ны 79. Под действием пружины 79 на оси 55 рычаг 56 будет поворачиваться до тех пор,
40 собления 37 и начнет вытягивать его из ячейки. При этом, упор 57 рычага 56 не будет отходить от упора 4 ячейки стелла- жа 1 до тех пор, пока на оси 55 рычаг 56 будет поворачиваться под действием пружи- ны 79. Под действием пружины 79 на оси 55 рычаг 56 будет поворачиваться до тех пор,
пока защелка 78 не подойдет к элемен- , ту 76. При этом элемент 76 будет дви- гаться по нижним элементам направляющих 5 ячейки стеллажа.
При дальнейшем движении грузозахватного приспособления 37. выступ 27 тягового элемента повернет, подпружиненный с возможностью ограниченного поворота левый упор 58 пройдет под планкой 30. Затем правый выступ 26 своим скосом под50
55 имет планку 30 и пройдет под ней. По- том пройдет правый упор 41 и своим скосом поднимет планку 30 и она попадет между правым и левым упорами 41. Грузоподъемное приспособление 37 зафиксируется относителыю рамы 11 грузоподъемной плошадки 10 в исходном положении (фиг. i3 и 2). При этом подающий элемент 25 войдет в паз 39 и подойдет к элементам рамы 38, а подающий элемент 24 остановится у края рамы 38. Левая торцовая телескопическая стенка 36 сойдёт с направляющи.х ячейки стеллажа 1 и под собственным весом повернет вокруг оси 34 и займет исходное положение (фиг. 13). Элемент стенки 75 из элемента 76 выйдет и коснется направляю- щ:их 12. Защелка 78 под действием пружины 79 войдет в .отверстие 77, фиксируя положение торцовой телескопической стенки 35, рычаг 56 через трос 66, поворачиваясь под действием стенки 35, упрется в подпружиненный упор 46, который под действием пружины 52 займет исходное положение.
При выгрузке груза 2 из ячейки левого стеллажа 1 цикл работ подъема торцовой телескопической стенки 36, движения грузозахв 1тного приспособления 37, привода 17 конвейера аналогичен описанной операции загрузки груза 2 в ячейки левого стеллажа I, но при подходе к упору 4 упора 57 привод 17 не включается. Рычаг, связанный с упором 57, будет поворачиваться вокруг оси 55, одновременно натягивая роликом 63 трос 66 и воздействуя на ось 81, отводит защелку 78, сжимая пружину 75. Упор 57 проскакивает верхнюю точку упора 4. В это время телескопическая стенка 36 выйдет из направляющих 5 и, поворачиваясь вокруг оси 34, под собственным в.есом олустится вниз. При этом элемент 75 выходит из элемента 76 левой торцовой телескопической стенки 36 под собственным весом. Тросом 66 рычаг 37 возвращается к упору 48 (фиг. 19). Зап1,ел- ка 78 под действием пружины 81 войдет в отверстие 77, фиксируя положение левой торцовой телескопической стенки 36. В этот момент привод 17 выключается и подается сигнал на- его реверс. Привод 17, изменив направление вращения, включится. Подающий элемент 24, пройдя вдоль паза 40 и дойдя до элементов рамы 38 грузозахватного приспособления 37, начнет выдвигать его из ячейки стеллажа 1. При этом . груз 2 будет также выдвигаться по направляющим 3 из ячейки стеллажа, опущенной зафиксированной торцовой телескопической стенкой 36, повторяющей внутренний профиль ячейки стеллажа, на направляюнхую 12 грузоподъемной площадки 10.
При установке грузозахватного приспособления 37 в исходное положение (фиг. 13). С взятым из левой ячейки грузом 2 на грузоподъемной площадке И) цикл работы ме- ханизма подъема привода 17 конвейера и подающих элементов 24 и 25 аналогичен описанной операции возвращения разгруженного грузозахватио о приспособления 37 в йгс ходное положение на грузоподъемную площадку (фиг. 13.
Из исходного положения (фиг. 13) грузоподъемная площадка с грузом 2 или без
него с помощью привода 8 вертикального
перемещения и привода. 7 горизонтального
перемещения крана-щтабелера 6 подается К
местам выгрузки или загрузки груза 2, предд
ставляющим собой открытые сверху для ук
ладки в них груза подъемно-транспортными механизмами ячейки стеллажа.
Цикл загрузки и выгрузки груза 2 из них аналогичен описанным операциям загрузки и выгрузки груза из ячеек стеллажа 1.
При загрузке и выгрузке из ячеек пра вого стеллажа 1 грузов 2 цикл аналогичен тем же операциям, описанным для левого, стеллажа 1.
20
Формула изобретения
Склад для хранения щтучных грузов, содержащий стеллажи с опорными направляющими для грузов, и задающими упорами, кран-щтабелер с грузоподъемной площадкой
5 и смонтированным на ней грузозахватным приспособлением, на раме которого, расположенной вдоль площадки, закреплены торцовые стенки, механизм их перемещения в вертикальной плоскости, имеющий рычаги, соединенные с торцовыми стенками и свя0 занные подпружиненными защелками с подпружиненными и установленными с возможностью ограниченного поворота упорами, подпружиненную в вертикальном направлении планку и привод перемещения грузозахватного приспособления внутрь стеллажей, вклЮ
5 чающий в себя тяговый гибкий орган с толкателями для взаимодействия с рамой грузозахватного приспособления, отличающийся тем, что, с целью повыщения надежности, торцовые стенки закреплены на раме
д грузозахватного приспособления с возможностью поворота вокруг горизонтальных осей посредством гибких органов соединены с рычагами механизма их перемещения в вертикальной плоскости, которые закреплены с воз можностью ограниченного поворота, тяговый
5 гибкий орган привода перемещения грузО захватного приспособления выполнен с выступами для взаимодействия одних из них с подпружиненными упорами, а других - с подпружиненной планкой, при этом в ячейках стеллажей с зазором относительно их задних
0 стенок и параллельно опорным направляЮ щим для грузов смонтированы направляющие для торцовых стенок и рамы грузо- захватного приспособления, а задающие упо. ры в ячейках стеллажей выполнены со ско- Сами и размещены с возможностью взаимо5 действия с рычагами упомянутого механизма перемещения стенок.
2 2
Фиг.1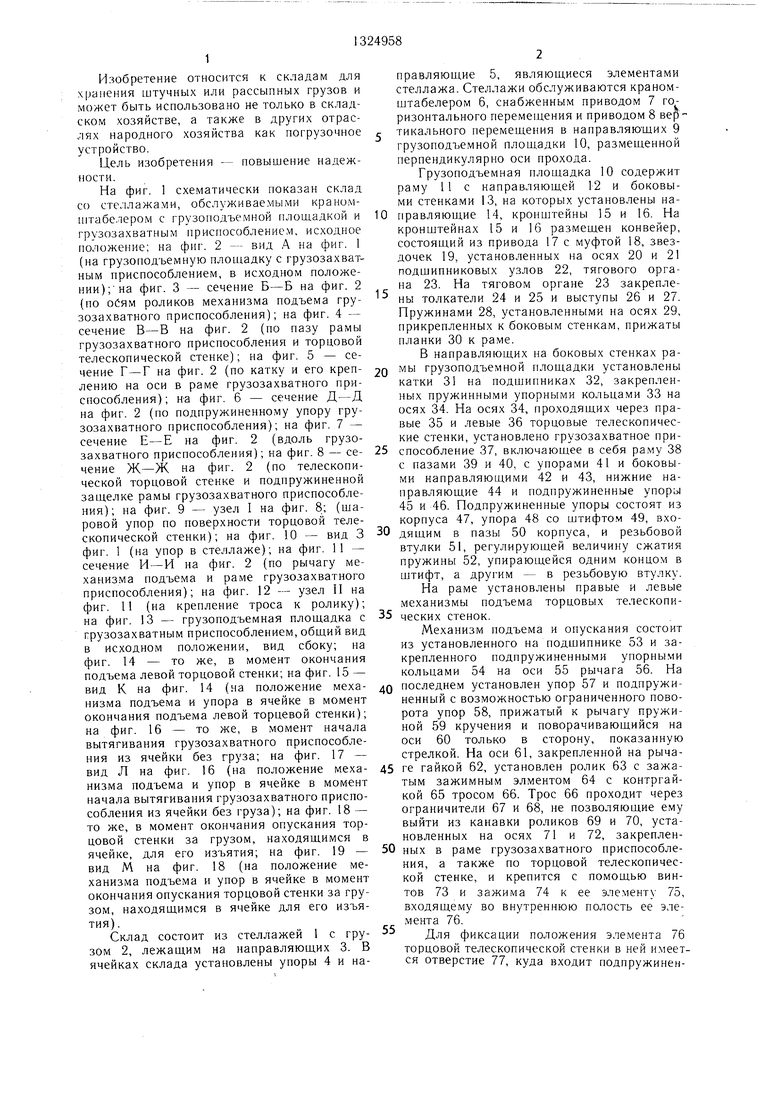
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения штучных грузов | 1984 |
|
SU1211174A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ СЕПАРАЦИИ И СОРТИРОВАНИЯ ОТВАЛЬНЫХ МЕТАЛЛУРГИЧЕСКИХ И ЛИТЕЙНЫХ ШЛАКОВ | 1991 |
|
RU2018372C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Кран для подъема и подачи грузов в оконный проем здания | 1990 |
|
SU1808809A1 |
Изобретение относится к складам для хранения штучных или рассыпных грузов. Цель изобретения - повышение надежности. Склад содержит стеллажи и кран- штабелер с горизонтальной плошадкой и смонтированным на ней грузозахватным приспособлением, имеюшим торцовые стенки 35 и 36, механизм их перемешения в вертикальной плоскости. Торцовые стенки 35 и 36 закреплены на раме грузозахватного приспособления с возможностью пово fC f 7 Г - 26 26 21 2 22 А Фиг2 рота вокруг горизонтальных осей и посредством гибких органов-тросов 66 соединены с рычагами 56. Гибкий тяговый орган привода перемещения грузозахватного механизма выполнен с выступами 26, 27 для взаимодействия одних с подпружиненными упорами, а других - с подпружиненной планкой 30. В ячейках установлены направляю- ш.ие, выполненные с опорными направляю- шими для грузов и размещенными с зазором относительно задней стенки стеллажа направляющими элементами для стенок 35 и 36, а также установлены упоры. При выдвижении грузозахватного приспособления внутрь ячейки стеллажа торцовая стенка 35 или 36 перемещается по элементам направляющих и, дойдя до зазора между ними и стенкой стеллажа, поворачивается и опускается, фиксируясь в данном положении защелкой. 19 ил. S (Л fff/ffA Ц5 со ю 4 СО сд 00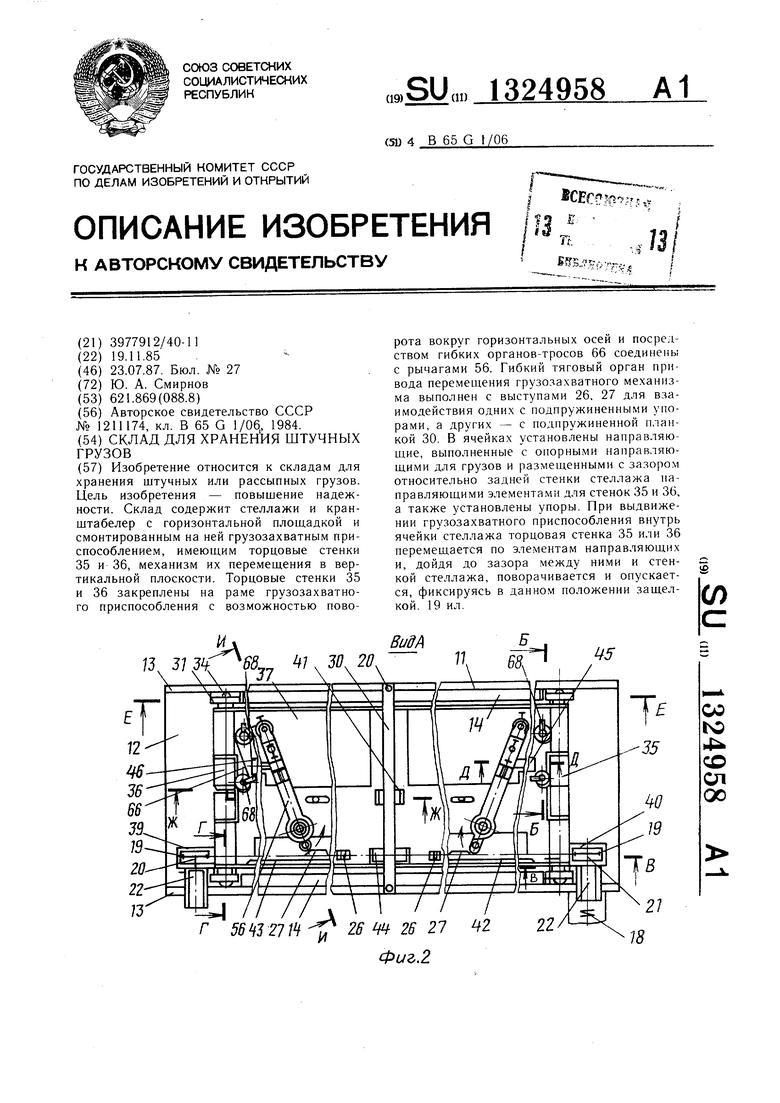
Фиг.З
Фиг.
Фиг. 5
Фиг.1
ж-ж
31 5 77 78 81 82 79 80
Фиг.8
23
Вид
(Риг. 9
Фиг. Ю
ТА
М- 37 6261 57 30 7 5В 5Z55.QO 5S
Л
Фиг.11
19 25 34 23 27
Д 66 6д-б1
Фиг. 12
33 12 36
13
78 7Э
79 78 2 Ю
ФагЛЗ
25 19 23 ЗЦ 27 78 26 29 28JO 26 79 27 78
j 7 i.l / / -Ji1- I //// WH
i/a.;4i
J6 J7 J W 55 56 81 63 W 38 26 41 30
fi7. . i I ./ //V . /
3 58 27
Фиг. 15
3 34 7875 Щ
I N WVgy/l IV V /V4/ yi I A
/1
2
J3 27 23 26
4
W
. /
J Jfi J/ 14 67 Ml .
/III
J6 2
6
Фиг. 18 Budr
39
69
/ /. f-. j
666351
Фиг. ly
( оставитсль В. Алешин
Техред И. ВересКорректор А. Зимокосов
Тнраж 776Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий.
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Склад для хранения штучных грузов | 1984 |
|
SU1211174A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
