(Л
СП СП
сд
со
Изобретение относится к землеройной технике, а конкретнее к одноковшовым экскаваторам-погрузчикам.
Известен экскаватор-погрузчик, включающий колесное шасси, на котором смонтировано рабочее оборудование погрузчика и экскаватора «обратная лопата 1.
Наиболее близким к предложенному является экскаватор-погрузчик, включающий полноповоротную платформу, установленную на поворотном круге опорной рамы, на которой оппозитно смонтированы поворотные ковши погрузчика и обратной лопаты посредством механизма их перемещения в вертикальной плоскости с гидроприводом 2. Общим недостатком известных экскаваторов-погрузчиков является ограниченная область применения из-за низкой проходимости.
Цель изобретения - расширение технологических возможностей и проходимости. Цель достигается тем, что в экскаваторепогрузчике, включающем платформу, установленную на полноповоротном круге опорной рамы, на которой оппозитно смонтированы ковщи погрузчика и обратной лопаты с механизмом их перемещения в вертикальной плоскости, последний выполнен в виде установленной на платформе вертикальной приводной телескопической надстройки и соединенных с ее верхней частью горизонтальных приводных и телескопических стрел, концы которых посредством вертикальных приводных телескопических рукоятей связаны с ковшами.
Кроме того, телескопические рукоятки выполнены в виде шанирных многократных параллелограммов.
На фиг. 1 изображен экскаватор-погрузчик, вид сбоку; на фиг. 2 - то же, вид в плане.
Экскаватор включает платформу 1, на которой смонтирован полноповоротный круг 2, получающий вращение от гидродвигателя 3 через трубчатое зацепление. На полноповоротном круге монтирована кабина с приводными механизмами 4, с полноповоротным кругом связана телескопическая надстройка 5, выполненная в виде шарнирных многократных параллелограммов, ползуны которых 6 и 7 перемещаются по направляющим 8 и 9. Направляющая 8 связана с направляющими 10 и 11, которые прикреплены к площадке 12, по направляющим 10 и 11 перемещаются ползуны 13 и 14 шарнирных механизмов телескопических стрел 15 и 16, шарнирно связанных с направляющими 17 и 18 и перемещаемых по ним ползунами 19 и 20. Направляющая 17 связана с направляющей 21, соединены площадкой 22, направляющая 18 связана с направляющей 23, соединены площадкой 24. К направляющим 21 и 23 шарнирно присоединены телескопические рукояти в виде шарнирных
параллелограммов 25 и 26 с ползунами 27 и 28, причем нижний конец параллелограмма 25 шарнирно связан с ковшом 29 направляющей 30 и ползуном 31, направляющая 30 щарнирно связана с гидроцилиндром 32, щток которого щарнирно связан с ковшом 29. Нижний конец параллелограмма 26 шарнирно связан с ковшом 33 погрузчика, направляющей 34, ползуном 35, в свою очередь направляющая 34 щарнирно
связана с гидроцилиндром 36, шток которого шарнирно связан с ковшом 33 для поворота ковща. Шарнирные многократные параллелограммы перемещаются посредством гидроцилиидров 37-41.
Экскаватор-погрузчик работает следующим образом.
Платформа 1 и ковщ 33 погрузчика оперты на землю, параллелограммы 16, 26, 15 находятся в удобном для работы сжатом состоянии, затем гидроцилиндром 39 па0 раллелограммный механизм 15 выдвигается вперед с ковшом 29 над разрабатывае.мым грунтом, после чего ковш 29 посредством гидроцилиндра 32, параллелограмма 25 гидроцилиндра 38 внедряется в грунт на
5 необходимую глубину, далее путем сжатия механизма 15 с последующим поворотом ковща 29 гидроцилиндром 32 и сжатием параллелограммного механизма 25 производится разработка грунта с последующим подъемом ковша 33 параллелограм0 мным .механизмом 26 посредством гидроцилиндра 41 и поворотом платформы 2 с помощью гидродвигателя 3 и зубчатого зацепления в сторону разгрузки. Разгрузка ковша 29 осуществляется путем его поворота гидроцилиндром 32. Цри работе погруз5 чиком ковщ погрузчика параллелограммным механизмом 26 опускается на необходимую глубину копания, затем механизмом 16 продвигается вперед до набора ковшом грунта, поднимается и с помощью гидр роцилиндра 36 разгружается. Подчистка траншей или планируемой площади производится путем протягивания ковщей 29 или 33 от длины развернутых рычагов параллелограммиого механизма 15 или 16 до длины в их сжатом состоянии с дальнейшим пов5 торением цикла разработки грунта. Разработка откосов ведется путем одновре.менного сжатия механизма 15 и 25 ковшом экскаватора или погрузчика с одновременным разворачиванием кривошипно-ползунной системы и сжатии системы 26, угол откоса зависит соответственно от скоростей движения ковшей 29 и 33, и площадок 22 и 24.
Перемещение экскаватора-погрузчика 5 осуществляется следующим образом.
Экскаватор погрузчик оперт на ковщ 29, 33 и платформу 1, кривошипно-ползунная система находится в развернутом состояНИИ, затем она под воздействием гидроцилиндра 3/ сжимается, платформа 1 поднимается, гидроцилиндрами 39 и 40 кривошипно-ползунная система сжимается и разворачивается, площадка 12 перемещается в сторону ковща 29 и вместе с ней платформа 1, затем под воздействием гидроцилиндра 37 платформа 1 опускается на грунт и поднимает над грунтом ковщи 29 и 33, механизм 16 сжимается, а 15 разворачивается, перемещая площадки 22 и 24 в сторону движения, в этот период может быть осуществлена перемена направления движения путем поворота полноповоротного круга 2 гидродвигателя 3 совместно с ковщами 29 и 33 в сторону движения, затем ковши 29 и 33 опускаются и далее цикл повторяется.
Применение изобретения расширяет технологические возможности экскаватора и улучщает его проходимость.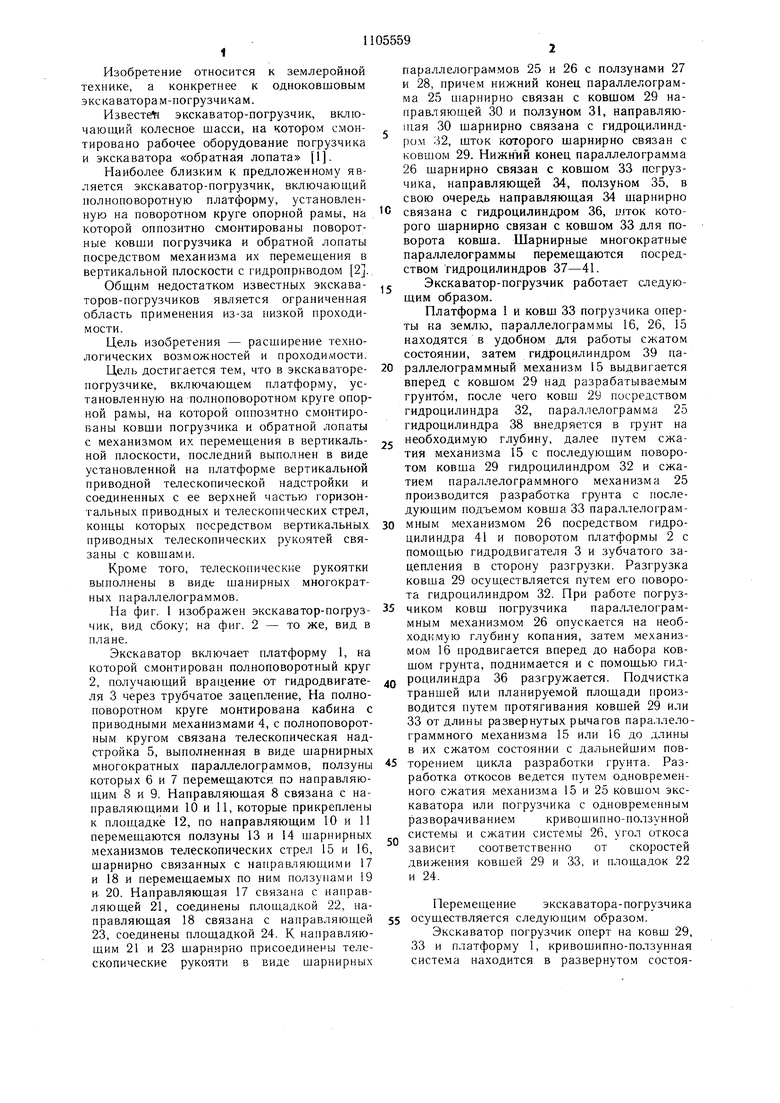
| название | год | авторы | номер документа |
|---|---|---|---|
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Рабочее оборудование прямая лопата гидравлического экскаватора | 2024 |
|
RU2829702C1 |
| Гидравлический одноковшовый экскаватор | 1979 |
|
SU823503A1 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
| Рабочее оборудование экскаватора-планировщика | 2023 |
|
RU2803183C1 |
| Экскаватор | 1986 |
|
SU1362789A1 |
| Траншейный экскаватор | 1979 |
|
SU815154A1 |
| Экскаватор | 1939 |
|
SU58598A1 |
| Экскаватор | 1977 |
|
SU753995A1 |
1. ЭКСКАВАТОР-ПОГРУЗЧИК, включающий платформу, установленную на полноповоротном круге опорной рамы, на которой оппозитно смонтированы ковши погрузчика и обратной лопаты с механизмом их перемещения в вертикальной плоскости с гидроприводом, отличающийся тем, что, с целью расщирения технологических возможностей и проходимости, механизм перемещения ковщей в вертикальной плоскости выполнен в виде установленной на платформе вертикальной приводной телескопической надстройки и соединенных с ее верхней частью горизонтальных приводных телескопических стрел, концы которых посредством вертикальных приводных телескопических рукоятей связаны с ковщами. 2. Экскаватор-погрузчик по п. 1, отличающийся тем, что телескопические рукоятки выполнены в виде щарнирных многогранных параллелограммов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИВОГО СЕЧЕНИЯ ГАЗОРАСПРЕДЕЛИТЕЛЬНОЙ РЕШЕТКИ | 1991 |
|
RU2091153C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Франции № 1556243, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
