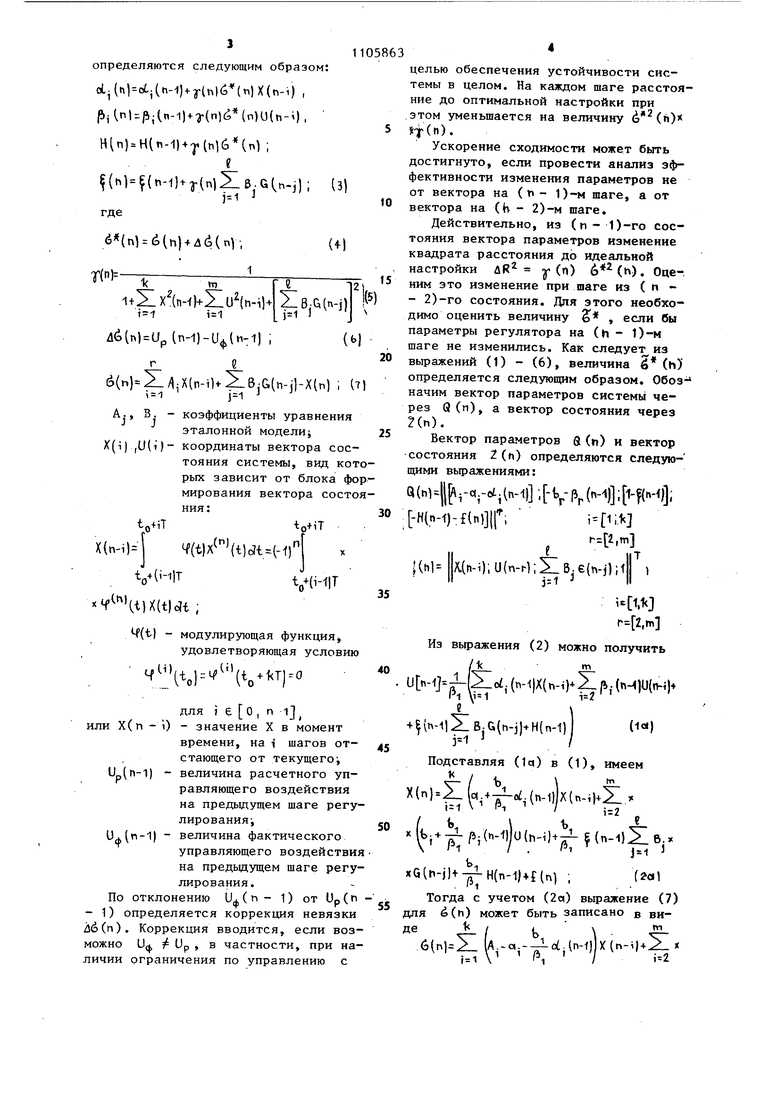
Изобретение относится к автоматическим системам управления общепромьгашенного назначения и может быть испольэовано в самонастраивающихся системах управления технологическими процессами. Известна система адаптивного упра ления, содержащая блок формирования коэффициента передачи контура коррек ции параметров, последовательно соединенные блок формирования функции чувствительности, вычислительное устройство, блок переменных коэффициентов, регулятор и объект управления. Последовательно с объектом система содержит фильтры, сумматор и блок памяти. Выходы блока переменных коэффициентов и регулятора через блок Коррекции функции чувствительности -соединены с входом блока формирования функции чувствительности, выход блока формирования коэффициента передачи контура коррекции соединен с входом вычислительного устройс ва, входы блока формирования коэффициента передачи контура коррекции параметров, вычислительного устройст ва и блока переменных коэффициентов соединены с выходом генератора компенсирующ1-гк сигналов. Вход фильтров через коммутаторы соединен с выходами объекта управления и регулятора, а выходы фильтров через сумматор соединены с блоком памяти, выходы которого соединены с соответствующими входами блока формирования функции чувствительности, вычислительного устройства, блока переменных коэф фициентов, блока формирования коэффициента передачи контура коррекции параметров 13Недостатками данной системы являются низкое быстродействие и точность. Цель изобретения - повышение быст родействия и точности системы. ита цель достигается тем, что система адаптивного управления, содерясащая блок формирования коэффициейта передачи контура коррекции па раметров, последовательно соединенные блок формирования функции чувствительности, вычислительное устройст во, блок переменных коэффициентов, регулятор, подключенный выходом ко входу объекта регльпирования, выход которого соединен с первым входом .блока формирования вектора состояния, соединенного в-.кодом с входом первого блока памяти, второй вход блока формирования вектора состояния соединен с выходом регулятора, выходы блока переменных коэффициентов и регулятора через блок коррекции функции чувствительности соединены с первым входом блока формирования функции чувствительности, выход блока формирования коэффициента передачи контура коррекции параметров соединен с вторым входом вычислительного устройства, первьм вход блока формирования коэффициента передачи контура коррекции параметров, третий вход вычислительного устройства и второй вход блока переменных коэффициентов соединены с выходом генератора компенсирующих сигналов, а выход первого блока памяти соединен с вторым входом блока формирования функции чувствительности, вторым входом блока формирования коэффициента передачи коррекции параметров, четвертым входом вычислительного устройства и третьим входом блока переменных коэффициентов, дополнительно содержит второй блок памяти и последовательно соединенные третий блок памяти и блок коррекции вычислительного устройства, вькод которого соединен с пятым входом вычислительного устройства, второй вход блокакоррекции вычислительного устройства соединен с выходом второго блока памяти, а третий вход соединен с выходом первого блока памяти, вход третьего блока памяти соединен с выходом блока формирования функции чувствительности, а второй вход - с выходом вычислительного устройства, вход второго блока памяти соединен с выходом первого блока памяти. В системе адаптивного управления коэффициенты регулятора реализующего для объекта, описываемого уравнением (.X(n-i).U(n-)f(nl; закон управления в виде k-1 m-1 X(n-i)+A-.fl.U(n-i) U(n). (п-Л + Н(п1 1105863 определяются следующим образом: . , ; . , ,. , ,4. ..,, .. oL.lnh-i n-ll yt (4X(n-i) , р. (nlrpj(n-l) + y(n)6(n)U{n-) , )H(n-1)-t-7« (h)(:)(r) ; с/ с/ I / , S 1 . , I (h)(t.-l)t(n)A.B.G(n-,) ; (3) р тт л п - d( м1 + лй( nV( 1 ту, 5 1 + $LxV-f)(h-ih ) И t-1 J ,) Up п-1)-иф1п-1) , (Ь1 р / I V А v( л Q л( -1 v( /-,. 6(n).X(n-i)Bj&(n-jl-X(n) , (7) А., S. - коэффициенты уравнения эталонной мoдeлиi 25 X(i) ,U{i)- координаты вектора соетояния системы, ввд которых зависит от блока формирования вектора состоя....Т . . )((n-i)l (t)(t)(-i) X J , J V(,-11T y(i.|j (t)X(ticfii 4(t| - модулирующая функция Mj .jr щ Hj ч , удовлетворяющая условию :1ЧИ ( для i е о, n или X(n-i) - значение X в момент времени, на i шагов стающего от текущего Up(n-1) - величина расчетного управляющего воздействия на предыдущем шаге регулирования,50 у (г1-1| - величина фактического управляющего воздействияна предьиущем шаге регулирования. По отклонению U.(п - 1) от Up(n - 1) определяется коррекция невязки Лб(п). Коррекция вводится, если возможно UH. Up , в частности, при г пииии пгпяничрния пп vпг ЯRЛPHИЮ С личии ограничения по управлению с 5 . целью обеспечения устойчивости системы в целом. На каждом шаге расстоя j,g д оптимальной настройки при этом уменьшается на величину d(h)x )i;-j(n). Ускорение сходимости может быть достигнуто, если провести анализ эффективности изменения параметров не „ лектора на (,. - 1)-м шаге, а от вектора на (Н - 2)-м шаге. . Действительно, из (п- 1)-го состояния вектора параметров изменение квадрата расстояния до идеальной настройки ЛК У М (h). Оце-. ним это изменение при шаге из ( п - 2)-го состояния. Для этого необходимо оценить величину б , если бы параметры регулятора на (h - 1)-м шаге не изменились. Как следуе-г, из выражений (1) - (6), величина 6 (h) определяется следующим образом. Обоз р параметров системы через (Э(п), а вектор состояния через 2(п) Вектор параметров S (г,) и вектор .состояния 2(h) определяются следую выражениями: .,. .. Q(l4f Г Г 1 0ГV r Ol tf(-.f()tri I, е i(M kM;u(n-r).e(H);t -11 J II M ,m „ /„ч вьфажения (2) можно получить / k m UM-J- Xo.{n4)X(n-ihZ/,.M)U(H+ J- - tA-1|2 Bj.G(n-j)+H(n-1) I () . , Подставляя (1а) в (1), имеем / Ъ Х(п) 21 o(. + -,. (п-1)Ь((п-4)+Х )( Р-, / j. / (1-1))и(г1-1) + (n-l) В.х ч / . i xQ(.j)t L H(n.i|+f (, ; (га . i Тогда с учетом (2а) выражение (7) для ё(п) может быть записано в виДб Ji- / t .6( lA.-ci---r oijln-1)U ( : 1 Р, I 1-2 I- i ,M)uM(i-J(nH)z U.G(n-j| H{«iil).|(ny, С учетом обозначений для (и) С учетом обозHat Z(} вьфажение для а (п) примет в i) вьфажение для )г(п, ; ; а{п1«а(п-1)-;(лгё(лн)2{гли) ; Тогда nU(Q(n--f)-y(n)6 V-)ZT(n-i))z(n y(n-1}Z(n)-(n)6(n-i)z.i)z(n 6U)-r(n)fi(h-(1zTtn-1)Z(n) . Поэтому ; 3((n)+-j{nV6 {n-()Z(n-1)Z(ti|. Изменение расстояния от вектор параметров на (и - 2)-м шаге сост вит ; ) , ;а от этой точки при иэменении пар метров вектора на (и - 1)-м шаге изменение составит Лр2 6(п-1)(п-1)+б2(п)Г : Таким образом, при uj ц сообразно воспользоваться для ра та параметров формулой Q(,)GHn-2|H-ylnj6(n)Z(n-l) , , а при обратном знаке неравенства мулой а(п) Q(n-1j-( п) 6 (h)Z (п-Я Вводя алгоритм в веде Q )(f)2ln-, где ; 2(n)6(n)(n)6(n-1)Z(n-l)Z{n) , 1 2(n)7()|(n-i)+6(n)y{n |о ln-1)yMt62(h)y(n видим, что коррекция вычислительного устройства сводится к изменению величины (а и точки отсчета параметров., Как следует из (8), для осуществления коррекции необходимо помнить вектор состояния на предыдущем шаге 2(п - 1), что и осуществляет второй блок памяти, и величину невязки на предыдущем шаге 6 (п - 1) и значения параметров на предыдущем шаге Q(rt - 1), что осуществляет блок памяти третий. БЛОК коррекгщи осуществляет расчет 6 и запись в вычислительное устройство вектора Q (п - 1), соответствующее значению Q. Сходимость ускоряется тем больше, чем больше коррелированы два последовательных вектора состояния системы. Блок-схема системы адаптивного управления представлена на чертеже. Система содержит блок 1 формирования коэффициента передачи контура коррекции параметров, блок 2 формирования функции чувствительности, вычислительное устройство 3, блок переменных коэффициентов 4, регулятор 5, объект 6 регулирования, блок 7 формирования вектора состояния, первый блок памяти 8, блок 9 коррекции функции чувствительности, генератор 10 компенсирующих сигналов, второй 11 и третий 12 блоки памяти и блок 13 коррекции вычислительного устройства. Система работает следующим образом. Задающее воздействие G подается на вход блока 2 формирования функции чувствительности - решанядего устройства любого типа формирующего в соответствии с выражением (7) оценку отклонения динамических свойств системы от заданных по полученным значениям составляющих вектора состояния, поступающих с выхода блока памяти 8. Определение вектора состояния осуществляет блок 7 по выходным сигналам регулятора 5 и объекта управления 6. Блок формирования коэффициента передачи контура коррекции параметров 1 реализует зависимость (5), обеспечивая устойчивость системы. Вычислительное устройство 3 в соответствии с зависимостью (3) определяет новые значения параметров 3 блок переменных коэффициентов 4 их реализует и вычисляет сигнал управления Up , определяемьй выражением (2), по которому регуля5 формирует управляющее воздейстторUj.p , Генератор 10 коьшенсирую виещих сигналов формирует сигналы, компенсирующие возмущения, и форма их определяется формой возмущений. Блок коррекции функций чувствительности 9 обеспечивает устойчивость системы при наличии ограничений на управлени и возмущений, действующих на регулятор, в соответствии с зависимостью (6). Блок памяти 11 запоминает предыдущий вектор состояния, а блок памяти 12 - значение оценки отклонения динамических свойств на предьщущем шаге и параметры ot, , Е на предыдущем шаге, по которым блок коррекции вычислительного устройства 13 определяет начальные значения вектора параметров для работы вычислительного устройства в соответствии с уравнениями (8).
Результаты опытной проверки показьшают, что предложенная система является более быстродействующей и точной, чем известная система. Её можно реализовать на микропроцессорной технике и использовать в качестве локальных регуляторов в АСУТП.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система адаптивного управления | 1980 |
|
SU932461A1 |
| Адаптивная система управления | 1981 |
|
SU940131A1 |
| Система управления с переменной структурой | 1987 |
|
SU1532896A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ ДЕВИАЦИИ МАГНИТОМЕТРИЧЕСКИХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550774C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ УЗКОПОЛОСНЫХ ШУМОВ В ПАССАЖИРСКОМ САЛОНЕ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2504025C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ РАБОЧИХ ПАРАМЕТРОВ ЯДЕРНОГО РЕАКТОРА И СООТВЕТСТВУЮЩИЙ ЯДЕРНЫЙ РЕАКТОР | 2019 |
|
RU2794140C2 |
| НЕЙРОПРОЦЕССОР, УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИЙ НАСЫЩЕНИЯ, ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И СУММАТОР | 1998 |
|
RU2131145C1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2650534C2 |
СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ, содержащая блок формирования коэффициента передачи контура коррекции параметров, последовательно соединенные блок формирования функции чувствительности, вычислительное устройство, блок переменных коэффициентов, регулятор, подключенный выходом ко входу объекта регулирования, выход которого соединен с первым входом блока формирования вектора состояния, соединенного выходом с входом первого блока памяти, второй вход блока формирования вектора состояния соединен с выходом регулятора, выходы блока переменных коэффициентов и регулятора через блок коррекции функции чувствительности соединены с первым входом блока формирования функции чувствительности, выход блока формирования коэффициента передачи контура коррекции параметров соединен с вторым входом вычислительного устройства, первый вход блока формирования коэффициента передачи контура коррекции параметров, третий вход вычислительного устройства и второй вход блока переменных коэффициентов соединены с выходом генератора компенсирующих сигналов, a выход первого блока памяти соединен с вторым входом блока формирования функции чувствительности, вторым входом блока формирования коэффициента передачи контура коррекции параметров, четвертым входом вычислительного устройства и 8 третьим входом блока переменных коэффициентов, о т л и ч а- ю щ a я. с я тем, что, с целью повышения быстродействия и точности системы, она содержит второй блок памяти и поспе§ .довательно соединенные третий блок шамяти и блок коррекции вычислительного устройства, выход которого соединен с пятым входом вычислительного устройства, второй вход блока О коррекции вычислительного устройстСЛ ва соединен с выходом второго (лока х памяти, a третий вход соединен с 9д М выходом первого блока памяти, вход третьего блока памяти соеданен с выходом блока формирования функции чувствительности, a второй вход - с выходом вычислительного устройства, вход второго блока памяти соединен с выходом первого блока памяти.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система адаптивного управления | 1980 |
|
SU932461A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
