(5) АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Система адаптивного управления | 1980 |
|
SU932461A1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| Система адаптивного управления | 1982 |
|
SU1105863A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2015 |
|
RU2605946C1 |
1
Изобретение относится к автоматическому регулированию и управлению и может быть использовано в самонастраивающихся системах управления технологическими процессами.
Известна беспоисковая самонастраивающаяся система, использующая элементы в контуре самойастройки, которые содержат регулятор с подстраиваемым коэффициентом передачи, модель, устройство сравнения, блок памяти или дифференцирующие устройства, сумматоры 1.
Недостаток указанной системы - ее малые точность и устойчивость.
Наиболее близкой по технической сущности к предлагаемой является адаптивная система управления, содержащая последовательно соединенные формирователь функции чувствительности, генератор сигнала подстройки, регулятор, масштабирующий блок, цифроаналоговый преобразователь, объект управления и аналогоцифровой преобразователь, второй вход регулятора соединен с первым входом блока переменных коэффициентов и вторым входом формирователя функции чувствительности, а третьи входы - с соответствующими входами блока переменных коэ(1к|)ициентов, вторые входы которого соединены с выходом формирователя функции чувствительности, а третьи входы - с соответствующими выходами регулятораf2l.
Недостаток известной системы - малые точность и устойчивость работы.
Цель изобретения - повышение точности, устойчивости и надежности системы за счет использования дискретного способа сбора и обработки информации, легко реализуемого на стандартных цифровых элементах.
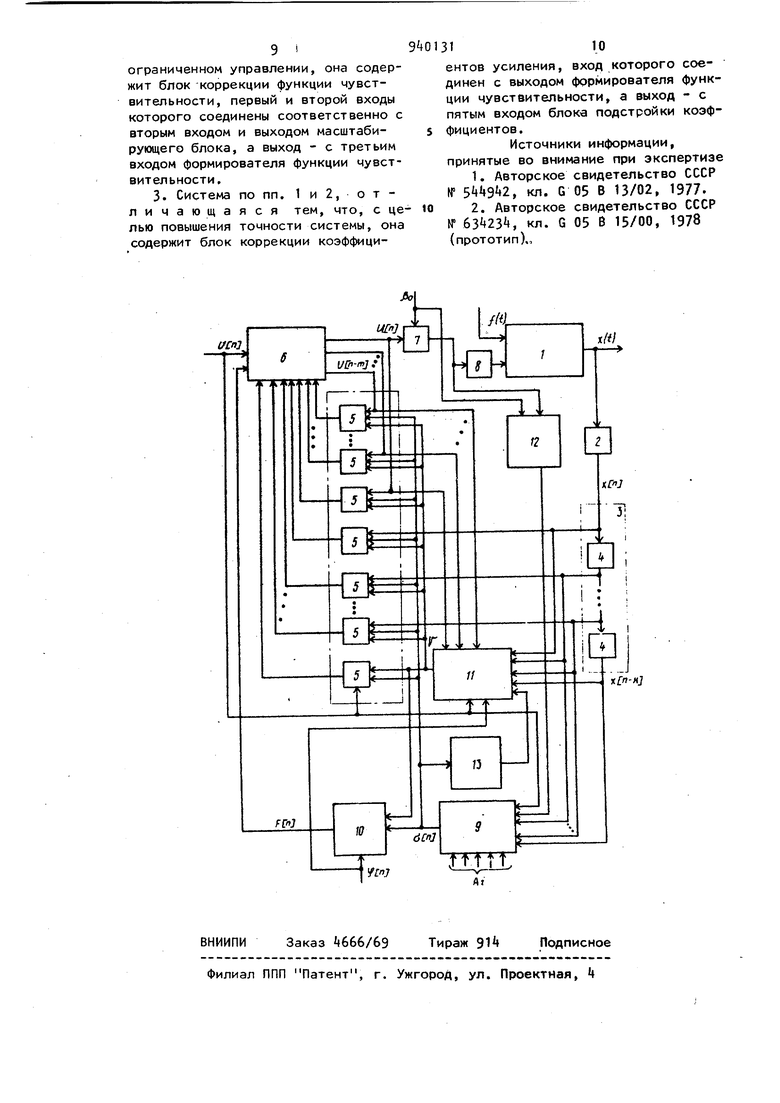
Указанная цель достигается тем, что устройство содержит последовательно соединенные блок памяти и i блок подстройки коэффициентов, выход 3 которого соединен с четвертыми вход ми блока переменных коэффициентов и вторым входом генератора сигнала подстройки, вторые входы блока пере менных коэффициентов соединены с со ответствующими выходами регулятора, третий вход - с вторым входом регулятора, а четвертый вход - с третьим входом генератора сигнала подстройки, вход блока памяти соеди нен с выходом аналого-цифрового пре образователя, а выходы - с соответствукхцими пятыми входами блока переменных коэффициентов. Система содержит блок коррекции функции чувствительности, первый и второй входы которого соединены соответственно с вторым входом и выхо дом масштабирующего блока, а выход с третьим входом формирователя функ ции чувствительности. Система содержит блок коррекции коэффициентов усиления, вход которого соединен с выходом формирователя функции чувствительности, а выход - с пятым входом блока подстройки коэффициентов. На чертеже показана структурная схема адаптивной системы управления она может состоять из трех контуров. Основной контур - контур управления состоит из объекта 1 управления, аналого-цифрового преобразователя 2, блока 3 памяти, состоящего из к последовательно соединенных регистров i сдвига, блока переменного коэффициента, состоящего из блоков 5 с переменным коэффициентом, регулятора 6, масштабирующего блока 7 и цифроаналогового преобразователя 8. Параметрический контур - контур подстройки коэффициентов регулятора состоит из объекта 1 управления аналого-цифрового преобразователя 2, блока 3 памяти, формирователя 9 функции чувствительности, генератора 10 сигнала подстройки, блоков с переменным коэффициентом и регулятораТретий контур - контур подстройки коэффициентов параметрического контура состоит из объекта 1 управления, АЦП 2, блока 3 памяти, регулятора 6, блока 11 подстройки коэффициентоа (параметрического контура), блоков 5 с переменными коэффициентами и регулятора 6„ 14 Кроме того, устройство содержит блок 12 коррекции функции чувствительности и блок 13 коррекции коэффициентов усиления (параметрического контура). Сигнал с выхода объекта 1 управления через аналого-цифровой преобразователь 2 и блок 3 памяти, состоящий из к последовательно соединенных регистров 4 сдвига, поступает на первые входы блоков 5 с переменным коэффициентом, а также на соответствующие входы формирователя |9 функции чувствительности и блока 1 1 подстройки коэффициентов (параметрического контура). Вторыми входами функции формирователя 9 чувстви- ельности служат установки желаемых динамических параметров объекта и вектор задания движения системы . Выход формирователя 9 соединен с входом генератора 10, формирующего параметр сигнальной настройки ГГп, и с вторыми-входами однотипных блоков 5 с переменным коэффициентом, выходы которых связаны с соответствующими входами регулятора 6. Выход регулятора 6 через масштабирующий блок 7 и цифроаналоговый преобразователь 8 соединен с входом объекта 1 управления. Одним из основных блоков, обеспечивающим устойчивую работу системы в целом, является блок 11 подстройки коэффициентов усиления параметрического контура, входами которого служат все величины, коэффициенты при которых настраиваются, а выход соединен с третьими входами блоков 5 с переменными коэффициентами. Дополнительным блоком, обеспечивающим устойчивую работу системы адаптивного управления в случае наличия ограничения на величину управляющего воздействия, является блок 12 коррекции функции чувствительности, вход которого подключен к выходу масштабирующего блока 7 регулятора 6, а выход - к дополнительному входу формирователя 9 функции чувствительности. Дополнительным блоком, обеспечивающим улучшение динамических свойств системы, является блок 13 коррекции коэффициента передачи параметрического контура, вход которого подключен к выходу формирователя 9 функции чувствительности, а выход - к дополкоэффициентов передачи параметрического контура. Предлагаемая система работает по изложенному ниже алгоритму, блоки 5,6,9-13 легко реализуем на стандартных типовых элементах вычислительной техники, в частности на управляющей вычислительной машине. Устройство работает следующим об разом. Согласно выбранному принципу ада тации для объекта, описываемого раз ностным уравнением. .хспчз.., где а и Ь- - неизвестные параметры объекта; сигнальное возмущение представляемое в виде g Ft C d-tnlM-Cn iг V где некоторая система линейно независимых функций. Управляющее воздействие, .формируемо оегулятором 6, выбирается в виде ад4(р ,-х п-1 ср игп-зз : .4.Cn3 . I такое, чтобы желаемое движение системы, которое задается уравнением ., где Л{ - параметры модели системы х- обобщенное задающее воздействие-. «УГНЗ - задающее воздействие. Т.е адаптивная система должна обес чить выполнение условия . Мерой выполнения этого условия служит функция невязки ($Н Г1 у. xCti-iJW n -xCn3, ции чувствительности о При . Для определения искомых значений коэффициентов, реализуемых блоками 5 с переменными коэффициентами, используется градиентный метод самонастройки, минимизирующий функционал , согласно которому d.Cn d n-l3+f n}6 n.xCnH i tl-l WбС U fn-j - С d,,tn..yrn..cf,Cn3. Величина шага настройки параметрического контура п, формируемая блоком 11 выбирается из усяовия устойчивости системы, согласно второму методу Ляпунова. Если выбрать функцию Ляпунова в виде , где Q - эа1«лидова норма параметрических рассогласований, Q |IV«i-cC, ; /. п г т/ Tt ч .|;x4n.i au2cn-jhv4n.&4Un -S Следовательно, блок 11 должен реализовать функцию П л б о C. jtO1 1 Генератор 10 реализует функцию сигнальной подстройки в виде .n.4.Cn. 1 1 При наличии ограничений на управляющее воздействие видаЦ „ и п и(, блок 12 коррекции функции чуветвительности осуществляет коррекциюСэГп „а величину . определяемую выражением(}JpCn -Ucplnl)|bo, где ОрМ расчитанное значение упра ления , . ,,l%dx .„ ,, При этом приращение параметров определяется величиной скорректирова ной невязки Oh п + система сохраняет устойчивость в целом Для доказательства рассмотрим снова k jUCnll.c K.-a.-ci.)(V. i 1j::- 4 -f/ PlS-M- 3,-tb) /iVrn r 1iS nluQ n }+jaQtn | ra( .G n}-ZW).jr4n -6 n -l2tti | .() , ,Utn-Jl, , lGlCn lC) ПРИ iainUW)) и тогда , если осуществить коррекцию ii п в соответствии с приведенным выражением, В предлагаемом способе определения величины шага выполняется ус ловие Qt lJ-Z-frl O. При коррелирован ности If n-ffj и 2 Cfi3 целесообразно учитывать постоянство направления вращения вектора Ifn и доворачивать вектор параметрических рассогласований при-постоянстве знака на некотором интервале. Это осуществляет блок 13 коррекции при наличии которого блок 11 реализует функ цию --itSrа блок 13 осуществляет расчет в соответствии с выражением m-i 1 Таким образом, предлагаемая адаптивная система не содержит блоков, выполняющих какие-либо сложные математические операции кроме арифметических, и легко может быть реализована на элементах цифровой техники, что выгодно отличает ее от известной. Использование единой элементной базы, построенной на дискретных элементах вычислительной техники, значительно повышает помехоустойчивость и надежность адаптивного регулятора, а использование алгоритма с переменным шагом настройки параметрического контура в 2-3 раза улучшает динамические характеристики системы - точность, время адаптации. Формула изобретения 1.Адаптивная система управления, содержащая последовательно соединенные формирователь функции чувствительности, генератор сигнала подстройки, регулятор, масштабирующий блок, цифроаналоговый преобразователь, объект управления и аналогоцифровой преобразователь, второй вход регулятора соединен с первым входом блока переменных коэффициентов и вторым входом формирователя функции чувствительности, а третьи входы с соответствующими входами блока переменных коэффициентов, вторые входы которого соединены с выходом формирователя функции чувствительности, а третьи входы - с соответствующими выходами регулятора, отличающаяся тем, что, с целью повышения точности системы, она содержит последовательно соединенные блок памяти и блок подстройки коэффициентов, выход которого соединен с вторым входом генератора сигнала подстройки и четвертыми входами блока переменных коэффициентов, вторые входы которого соединены с соответствующими выходами регулятора, третий вход с вторым входом регулятора, а четвертый вход - с третьим входом генератора сигнала подстройки, вход блока памяти соединен с выходом аналого-цифрового преобразователя, а выходы - с соответствующими пятыми входами блока переменных коэффициентов. 2.Система по п. 1, отличающаяся тем, что, с целью повышения устойчивости системы при
ограниченном управлении, она содержит блок коррекции функции чувствительности, первый и второй входы которого соединены соответственно с вторым входом и выходом масштабирующего блока, а выход - с третьим входом формирователя функции чувствительности.
Источники информации, принятые во внимание при экспертизе
