сл
со ю
00
со оэ
Изобретение относится к автоматическому управлению и может быть использовано для управления объектами в условиях действия возмущений, например, в промышленных роботах или в летательных аппаратах.
Цель изобретения - повышение точности работы системы в условиях действия возмущений.
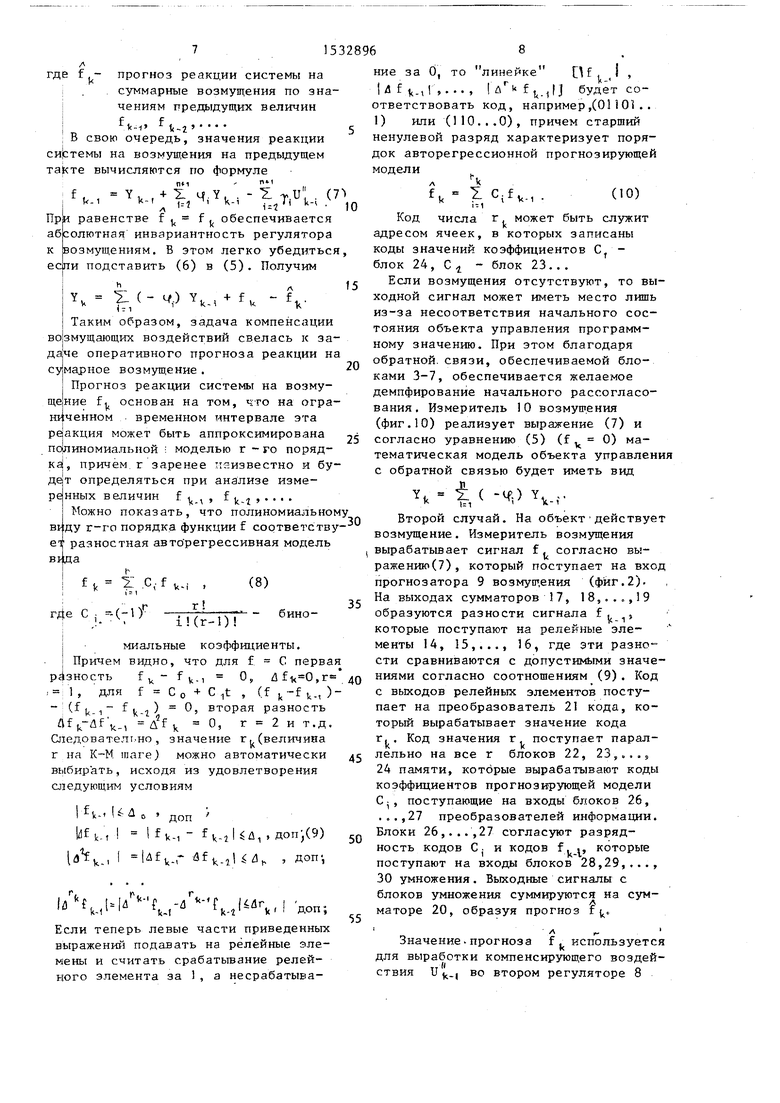
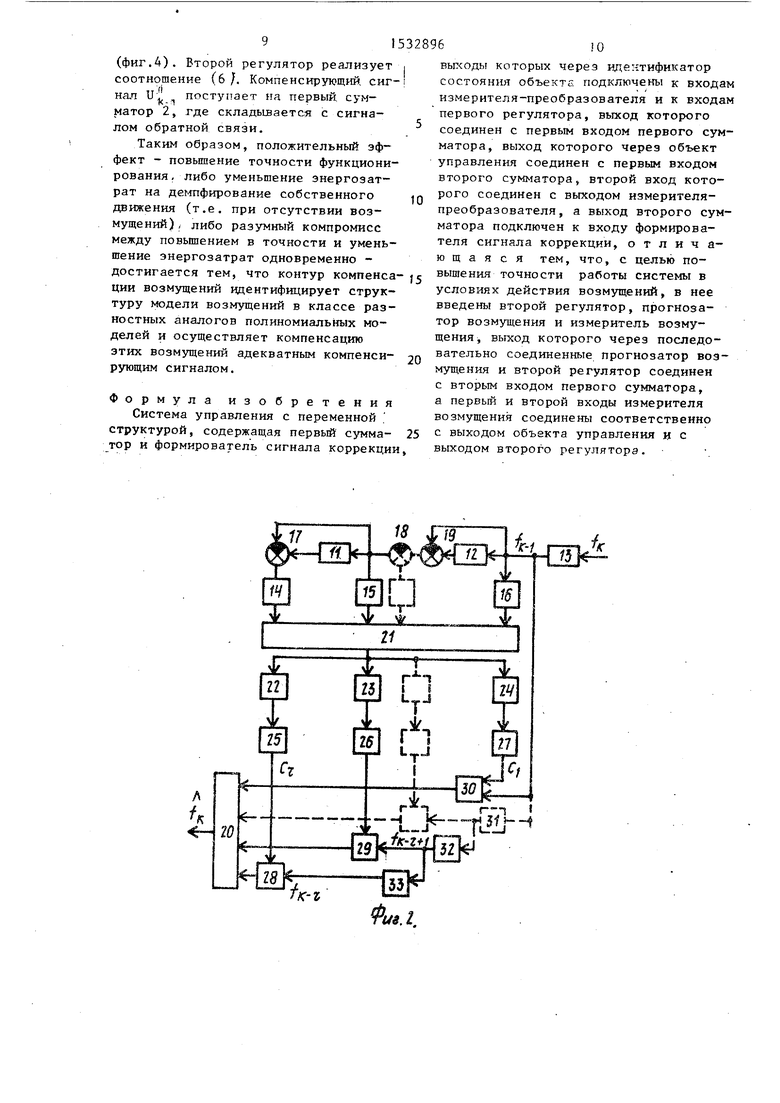
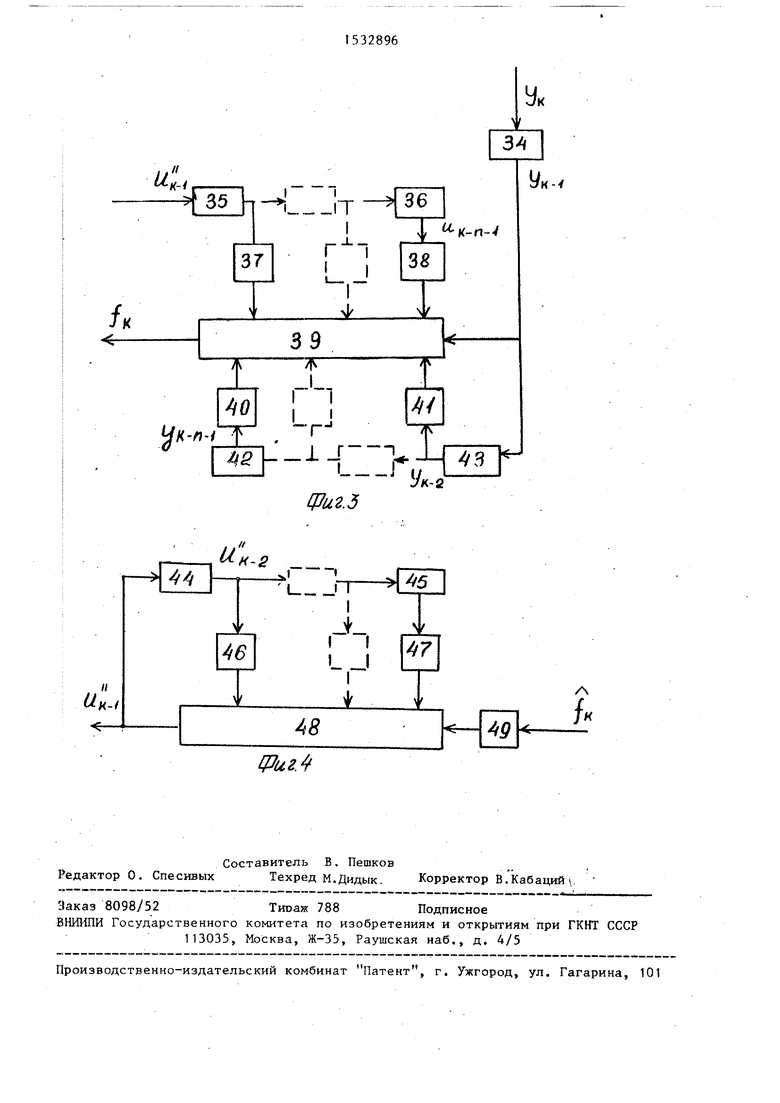
На фиг. 1 приведена функциональная схема системы управления с переменной структурой; на фиг.2 - функциональная схема прогнозатора возмущений; на фиг. 3 - функциональная схема из- мерителя возмущений; на фиг. 4 - функциональная схема второго регулятора.
Система управления (фиг.1) содержит объект 1 управления, первый сум- матор 2, первый регулятор 3, идентификатор 4 состояния объекта, измеритель- преобразователь 5, формирователь 6 сигнала коррекции, второй сумматор 7, второй регулятор 8, прогнозатор 9 возмущения и измеритель 10 возмущения.
Прогнозатор возмули .ля (фиг. 2) содержит г блоков 11, . ..,12, 13 задержки, г релейных элементов 14, 15,...,16 (г-1) сумматоров 17,18,...19 на два входа, сумматор 20 на г входов, преобразователь 21 кода, г блоков 22,23,.. 24 памяти, г преобразователей 25, 26,...,27 информации, г блоков 28, 29 ,... ,30 умножения и (г-1)блоков 31,. . . 32,33 задержки, причем г -блоков 13,. . . , 31 ,32,33 задержки соединены последовательно таким образом,что вход первого блока 13 задержки является входом прогнозатора 9, а выходы остальных блоков подключены также соответственно к первым входам г блоков 30, ...,29,28 уменожения, выход первого блока 33 задержки подключен также к (г-1) последовательно соединенным одинаковым звеньям, состоящим из Последовательно соединенных блока задержки (например, 12) и сумматора на два входа (например, 19), причем вход блока 12 задержки подключен также к вторым входам сумматоров (например, вход 12 подключен к входу 19), выход первого блока 13 задержки подключен также к первому релейному элементу 16, а остальные (г-1) релейных элемента 15,.„.,16 входами подключены к выходам (г-I) сумматоров 19,..., 18, 17, а выходы всех г релейных элементов 16,,.., 15,
Q «
5
4 подключены к г входам преобразователя 21 кода, выход которого через г последовательно соединенных блоков 22, 23,...,24 памяти, преобразователей 25, 26,...,27 информации4 подключены к вторым входам г блоков 28, 29,...,30 умножения, выходы которых подключены к г входам сумматора 20, выход которого является выходом прогнозатора 9.
Измеритель возмущения (фиг.3) содержит (п+1) блоков 34,35,...,36 задержки, п блоков 37,...,38 умножения на константу, сумматор 39 на (2п+1) входа, п блоков 40,...,41 умножения на константу и п блоков 42,...,43 задержки, причем к первому входу измерителя 10 возмущения подсоединены последовательно соединенные (п+1) блоков 34, 43,...,42 задержки, выход первого из них 34 непосредственно, а выходы остальных п блоков 43, ...,42 через п блоков 41 ,.. . , 40 умножения на константу подключены к (п+1) входам сумматора 39 на (2п+1) вход, а остальные п входов сумматора 39 через п других блоков 37,...,38 умножения на константу подключены к выходам остальных п последовательно соединенных блоков 35,.,,36 задержки, причем вход первого из них (блок 35) является вторым входом измерителя 10 возмущения, а его вы- . ходом является выход сумматора 39.
Второй регулятор (фиг,4) содержит последовательно соединенные (п-1) блоков 44,...,45 задержки, (п-1) блоков 46, ... ,47 умножения на константу, сумматор 48 на (n-J) входов и блок 49 умножения ка константу, причем один из входов сулмато- ра 48 подключен через блок 49 умно- жения на константу к входу второго регулятора 8, а остальные (п-1) входов также подключены через блоки 46,...,47 умножения на константу и выходам (п-1) последовательно соединенных блоков 44,... ,45 задержки, первый из которых 44 подключен к выходу сумматора 48 и выход которого является выходом второго регулятора 8,
Система управления с переменной структурой работает следующим образом.
В системе создано три контура.
Контур основной обратной связи, состоящий из первого сумматора 2., объекта 1 управления, идентификатора
10
15
20
4 состояния объекта и первого регулятора 3. Назначение этого контура - обеспечение больших запасов устойчивости, даже если это потребует зна- чительного уменьшения коэффициента передачи данного разомкнутого контура.
Контур коррекции идентификатора состояния объекта, состоящий из идентификатора 4 состояния объекта, измерителя-преобразователя 5, второго сумматора 7 и формирователя 6 сигнала коррекции. Назначение этого контура - обеспечить желаемое качество демпфирования ошибок идентификатора состояния объекта.
Контур компенсации возмущений, состоящий из первого сумматора 2, объ екта 1 управления, измерителя 10 возмущения, прогнозатора 9 возмущения
и второго регулятора 8. Этот контур предназначен для выработки сигнала компенсации возмущения, причиной которого являются как изменения окружающей 25 среды, так и параметрическое отклоне- ния. Причем сигнал компенсации, вырабатываемый этим контуром, по структуре , и величине адекватен уровню и структуре действующих возмущений. Та- 30 ким образом, если возмущение меняет свою структуру, то меняет свою структуру и контур компенсации возмущения,
что делает систему переменной структуры. Следовательно,энергия для подавления возмущений расходуется лишь в случае появления таковых. При отсутствии возмущений (отработка ненулевых начальных условий) работают лишь контур основной обратной связи и контур Q коррекции идентификатора состояния объекта, в которых параметры выбраны из соображения обеспечения больших запасов устойчивости.
При появлении возмущений вклю- ., чается в работу контур компенсации возмущений, который вырабатывает адекватный компенсирующий сигнал. t управления, обеспечивающий высокую точность регулирования. Такая ор- 50 ганизация работы системы с переменной структурой позволяет экономить энергоемкость на интервалах времени, когда возмущения отсутствуют, и достигать ВЫСОКОЙ ТОЧНОСТИ В УСЛОВИЯХ cj
возмущений.
Объект управления и идентификатор состояния объекта управления описы- ваются разностными уравнениями
«Л
HkXk,
+ и
ч , ,.
fc-i + r V-i
(2)
(I)
0
5
ФЬХ
k-1
г(.1 +иЈ)
(3)
f KV IY, - „,+ 1(и + и;., )jp
где X, - п мерный вектор состояния объекта управления;
Y - выходной сигнал объекта управления;UK-I -сигналы управления, формируе
мые регуляторами 3 и 8; - оценка вектора состояния объекта управленияj
1;
0
5 0
Ф
k
Ч
г t -вектор возмущения-, Г,,
к,хв общем случае переменные матрицы соответствующей разности. Регулятор 3 реализует алгоритм
С-ТХ
и
k-l
Л
X,
V-i
(4)
для чего вектор у задерживается на I шаг дискретности, а затем скалярно перемножается с вектором коэффициентов . Измеритель-преобразователь 5 вычисляет прогноз измерения Yj,: Y ь
н rVuU ,.
В блоке 7 вычисляется разность v k B блоке 6 вычисляется произведение Kk(), а в блоке 4 вычисляется оценка Xv
Уравнения (I) - (4)можно привести к разностной форме для выходной координаты Y k:
Y |,( -4,v-, +|,U +fk. (5)
где t/. коэффициенты разностной модели объекта управления с учетом идентификатора состояния и первого регулятора, обеспечивающие желаемые запасы устойчивости (), jpj -коэффициенты эффективности компенсирующих управляющих воздействий;
f - суммарное проявление воэму- шающих воздействий на объект .
Выберем закон формирования сигнала компенсации возмущений в виде:
Ut . Zb,U, +
14
1 ,
т,
k-i Ъ.
Vk .
ъ--Ь
1 Т,
(6)
2,п,
где f J прогноз реакции системы на суммарные возмущения по значениям предыдущих величин
f .2 5
В свою очередь, значения реакции системы на возмущения на предыдущем такте вычисляются по формуле
ПМ Ч
f , - Y. + 1. ч Y. . - Z TU (71 k-tЬ- л ,., м, k, т( ц-i 1Q
При равенстве f fk обеспечивается
5328968
ние за 0, то линейке Ј . 1 , Uf.,1,..., Urkft 1|J будет соответствовать код, например ,(01 i 01 .. 1) или (110...0), причем старший ненулевой разряд характеризует порядок авторегрессионной прогнозирующей модели
Т C,f
аб|
Код
i i числа г
L V-l
(10)
может быть служит
солютная инвариантность регулятора возмущениям. В этом легко убедиться,
адресом ячеек, в которых записаны коды значений коэффициентов Ст - блок 24, С 4 - блок 23.. .
если подставить (6) в (5). Получим
- Ј(-„,)
Yk-, U
- F
15
V
25
| Таким образом, задача компенсации возмущающих воздействий свелась к задаче оперативного прогноза реакции на
сумарное возмущение.
Прогноз реакции системы на возмущение f, основан на том, чго на огра25
20
ниченном временном интервале эта реакция может быть аппроксимирована полиномиальной моделью г - го порядка, причем г заренее т иэвестно и бу- дв|Т определяться при анализе изме- ре|нных величин f и , f k , . ...
Можно показать, что полиномиальному r-го порядка функции f соответству25
et
разностная авторегрессивная модель
BJ-да
f i, Т с.
k-i
(8)
С , (
г
Шг-1)
бино35
миальные коэффициенты. Причем видно, что для f С первая разность fk fk., О, ,r
1, для f С
+ c.t
k-f u-, )- (f k-i fk-i ° вт°Рая разность flfk-flf k., A2f k 0, r 2 и г.д. Следователтно, значение г.(величина г на К-М шаге) можно автоматически выбирать, исходя из удовлетворения следующим условиям
доп
f k-i f k-il Л, доп (9)
50
1
k |4f k uf k.,,U и,, , Доп ,
.,. доп;
ЕСЛИ теперь левые части приведенных выражений подавать на релейные эле- мены и считать срабатывание релейного элемента за 1, а несрабатыва
Т C,f
i i числа г
L V-l
(10)
может быть служит
адресом ячеек, в которых записаны коды значений коэффициентов Ст - блок 24, С 4 - блок 23.. .
Если возмущения отсутствуют, то выходной сигнал может иметь место лишь из-за несоответствия начального состояния объекта управления программному значению. При этом благодаря обратной связи, обеспечиваемой блоками 3-7, обеспечивается желаемое демпфирование начального рассогласования. Измеритель 10 возмушения (фиг.10) реализует выражение (7) и согласно уравнению (5) (fv 0) математическая модель объекта управления с обратной связью будет иметь вид
Ј ( -Ч, Yv -.
Второй случай. На объект действует возмущение. Измеритель возмущения вырабатывает сигнал f, согласно выражению (7) , который поступает на вход прогнозатора 9 возмущения (фиг.2). На выходах сумматоров 17, 18,...,19 образуются разности сигнала f , 5 которые поступают на релейные элементы 14, 15,..., 16, где эти разности сравниваются с допустимыми значениями согласно соотношениям (9). Код с выходов релейных элементов поступает на преобразователь 21 кода, который вырабатывает значение кода г,. Код значения г, поступает параллельно на все г блоков 22, 23S...S 24 памяти, которые вырабатывают коды коэффициентов прогнозирующей модели GI} поступающие на входы блоков 26, ...,27 преобразователей информации. Блоки 26,...,27 согласуют разрядность кодов С( и кодов f. ,, которые поступают на входы блоков 28,29,,.., 30 умножения. Выходные сигналы с блоков умножения суммируются на сумматоре 20, образуя прогноз f.
1л г-
Значение.прогнозa ffc используется
для выработки компенсирующего воздействия U k.( во втором регуляторе 8
(фиг.4). Второй регулятор реализует соотношение (6/. Компенсирующий сигнал Ui поступает на первый сумматор 2, где складывается с сигналом обратной связи.
Таким образом, положительный эффект - повышение точности функционирования, либо уменьшение энергозатрат на демпфирование собственного движения (т.е. при отсутствии возмущений) , либо разумный компромисс между повышением в точности и уменьшение энергозатрат одновременно - достигается тем, что контур компенса ции возмущений идентифицирует структуру модели возмущений в классе разностных аналогов полиномиальных моделей и осуществляет компенсацию этих возмущений адекватным компенсирующим сигналом.
Формула изобретения
Система управления с переменной структурой, содержащая первый сумма- 25 тор и формирователь сигнала коррекции,
0
$
0
5
выходы которых через идентификатор состояния объекте подключены к входам измерителя-преобразователя и к входам первого регулятора, выход которого соединен с первым входом первого сумматора, выход которого через объект управления соединен с первым входом второго сумматора} второй вход которого соединен с выходом измерителя- преобразователя, а выход второго сумматора подключен к входу формирователя сигнала коррекции, отличающаяся тем, что, с целью повышения точности работы системы в условиях действия возмущений, в нее введены второй регулятор, прогноза- тор возмущения и измеритель возмущения, выход которого через последовательно соединенные прогнозатор возмущения и второй регулятор соединен с вторым входом первого сумматора, а первый и второй входы измерителя возмущения соединены соответственно с выходом объекта управления и с выходом второго регулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Бинарная система управления | 1984 |
|
SU1140095A1 |
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| Система автоматического управления периодическим процессом ферментации | 1989 |
|
SU1666538A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
| Аналого-цифровой регулятор тока | 1979 |
|
SU864242A1 |
Изобретение относится к системам автоматического управления и может быть использовано для управления объектами в условиях действия возмущений, например промышленными роботами или летательными аппаратами. Система управления с переменной структурой обеспечивает повышение точности контура компенсации возмущений, который идентифицирует структуру модели возмущений в классе разностных аналогов полиномиальных моделей и осуществляет компенсацию этих возмущений адекватным компенсирующим сигналом. Устройство содержит объект управления 1, два сумматора 2, 7, два регулятора 3, 8, идентификатор 4 состояния объекта, формирователь 6 сигнала коррекции, измеритель-преобразователь 5, прогнозатор возмущения 9 и измеритель возмущения 10. 4 ил.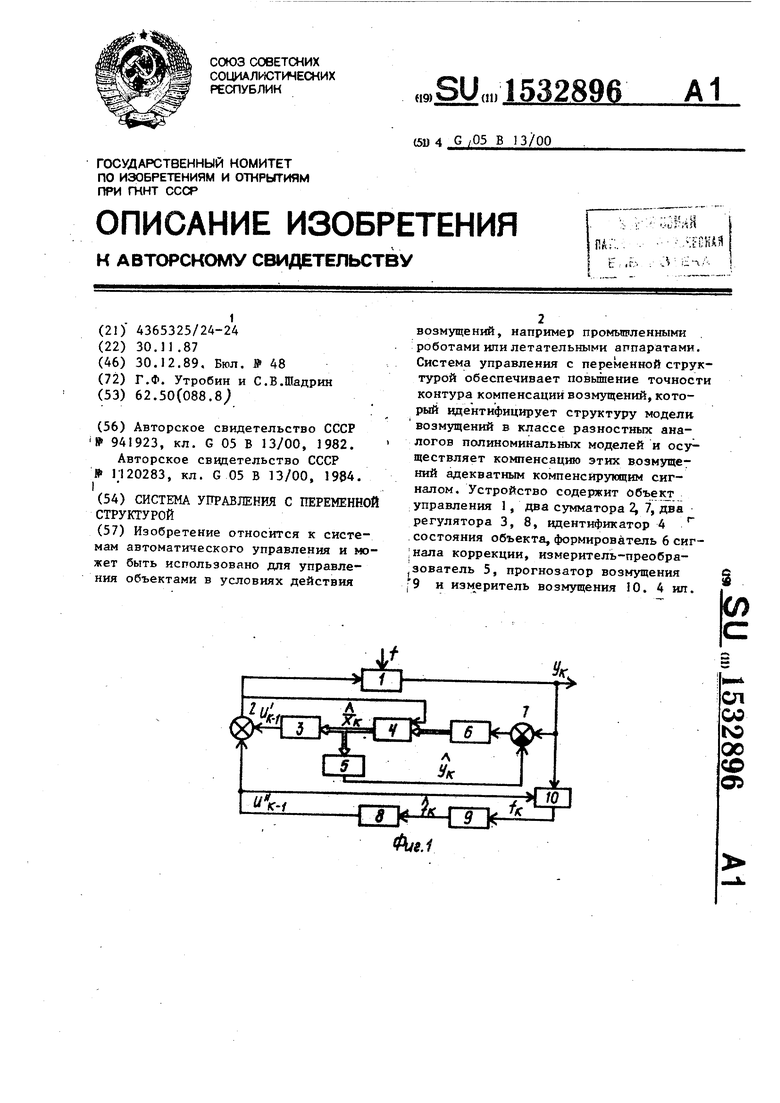
из
А К
Н
г/Г-1
ггл
hH
Фш. I
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
