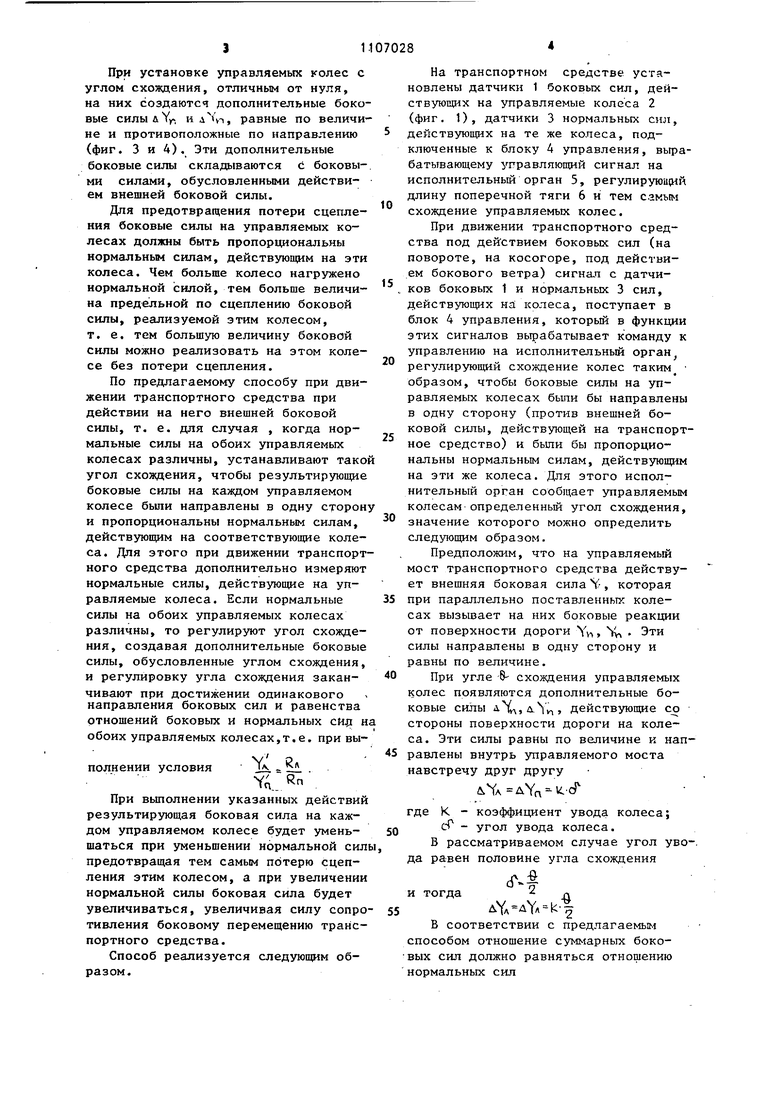
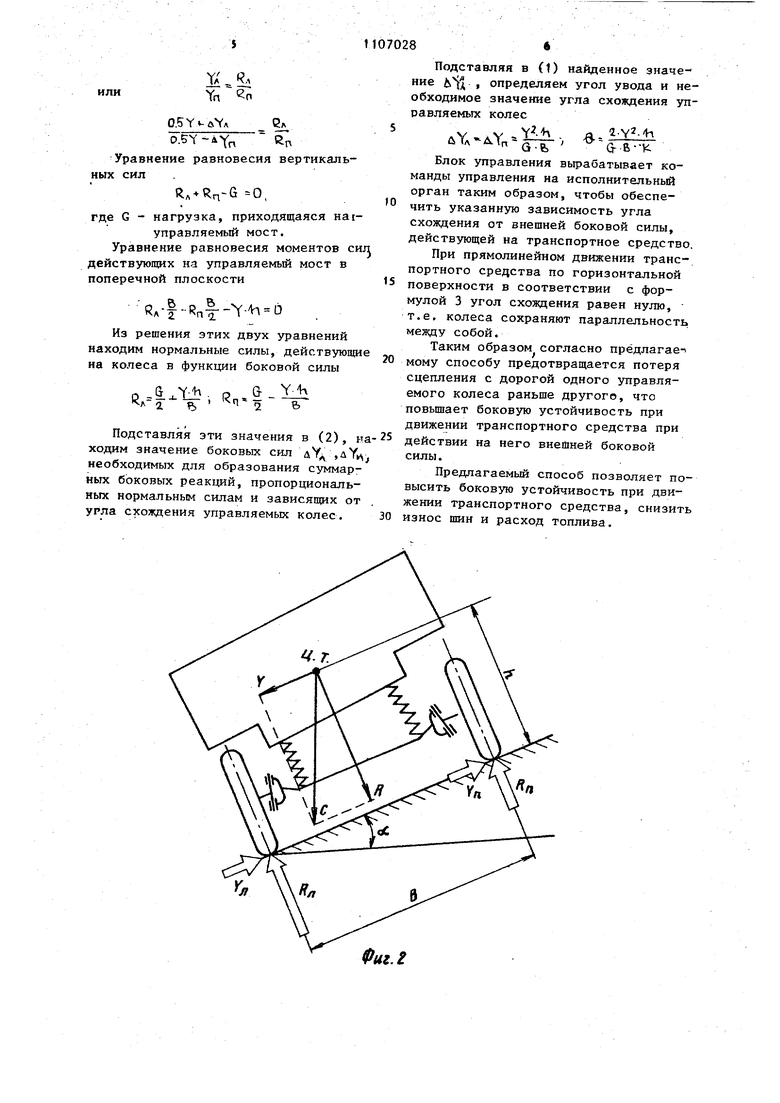
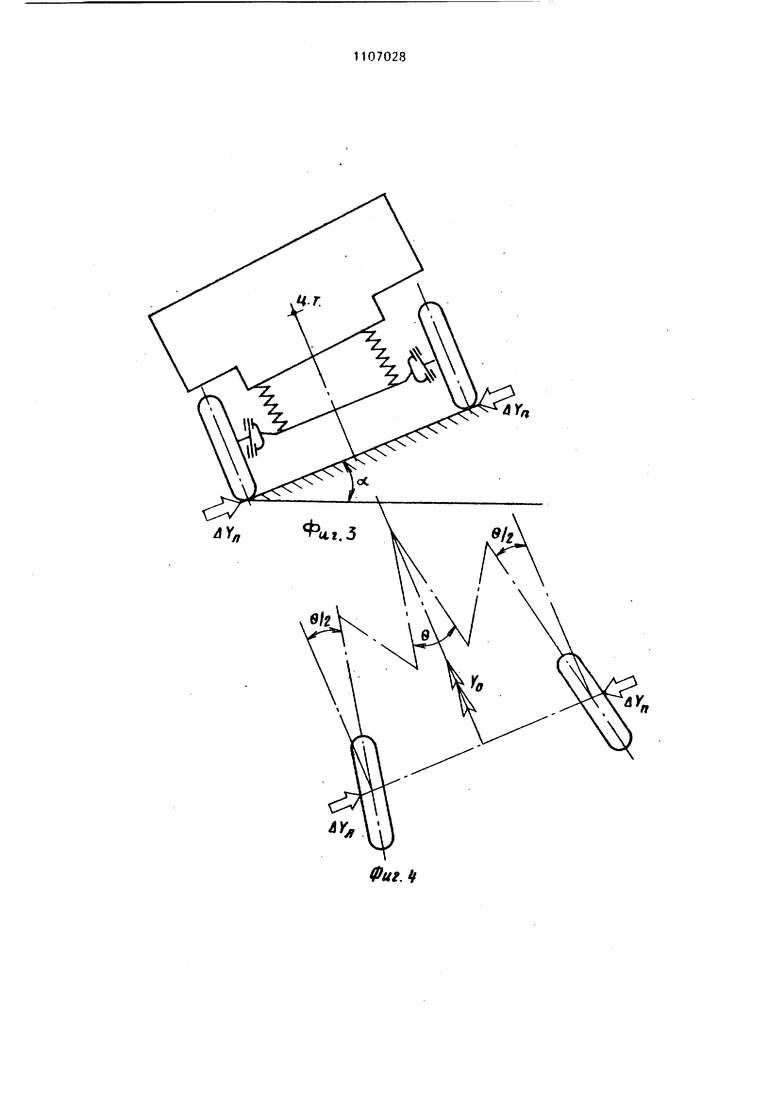
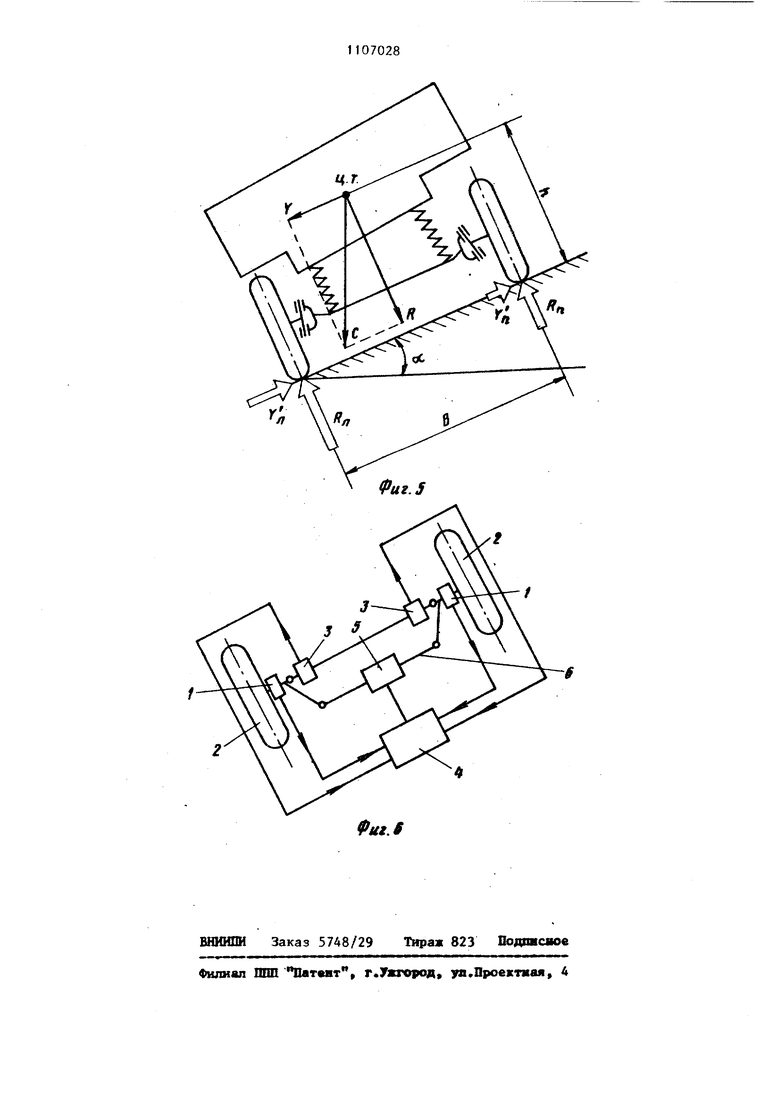
1 Изобретение относится к транспорт ному машиностроению и может быть использовано в исследованиях по выбору оптимального схождения управляемых колес транспортных средств, а также в конструкциях автомобилей. Известен способ установки оптимал ного схождения управляемых колес транспортного средства, заключающийс в том, что измеряют боковые силы на обоих управляемых колесах при движении и регулируют угол схождения в зависимости от величины направления этих сил. В известном способе регули ровку угла схождения заканчивают при достижении нулевых значений величины i боковых сил на обоих управляемых колесах tl .; Недостатком известного способа установки оптимального угла схождения управляемых колес является недос таточная боковая устойчивость при движении транспортного средства под дейст вием внешних боковых сил,например при движении на косогоре, повороте и т.д Это связано с тем, что не обеспечивается создание на каждом управляемом колесе максимальной суммарной боковой реакции, препятствующей отклонению направления движения транспортного средства от заданного из-за воздействия внешних боковых ci. Цель изобретения - повьшение попе речной устойчивости по скольжению транспортного средства при воздейстВИИ на него внешней боковой силы. Эта цель достигается тем, что сог ласно способу установки оптимального угла схождения управляемых колес транспортного средства, по которому измеряют боковые.; силы на обоих управляемых колесах при движении и регулируют угол схождения в зависимости от величины и направления этих сил, дополнительно измеряют воздействуюгдие. на оба управляемых колеса силы, нормальные к поверхности дороги, устанавливают величину угла схож дения при которой направления боковых сил совпадают, а отношение величины боковых сил равно отношению величин сил нормальных к поверхности дороги. На фиг. 1 изображено устройство, реализующее способ на фиг. 2 - схема сил, действующих на управляемые колеса при угле схождения, равном ну лю при движении транспортного сред28ства по косогору; на фиг. 3 - схема боровых сил на управляемых колесах, обусловленных установкой управляемых колес с углом схождения S-, вид сзади; на фиг. 4.- то же, вид сверху; на фиг. 5 - схема результирующих боковых сил на управляемых колесах, обусловленных совместным влиянием внешней боковой силы f и углом схождения &; на фиг. 6 - блок-схема устройства. При движении транспортного средст по косогору с параллельно установленными колесами, угол схождения равен нулю (фиг.-2), на обоих управляемых колесах будут создаваться равные боковые реакции,определяемые по формуле X-V2Gsino(. |oic: SiHQt, где пл - масса транспортного средства, приходящаяся на рассматриваемую ось; Q - ускорение свободного падения; 1.-. угол наклона дороги в поперечной плоскости. Нормальные реакции на левом и правом управляемых колесах будут различны и равны соответственно. RA-ftCOSO SOi)) Rr |CcosoL-|s(), - высота центра тяжести транспортного средства над поверхностью дороги; Ь - колея транспортного средства. Предельные по сцеплению боковые силы на каждом управляемом колесе определяются по формулам Улуч1ах -«А И Ynmay - n, где и - коэффициент сцепления. Так как верхнее правое колесо нагружено меньшей нормальной силой , то при увеличении внешней боковой силы (в данном случае силы, равной гла5т 4) верхнее правое управляемое колесо потеряет сцепление с дорогой раньше, чем нижнее левое управляемое колесо, нагруженное большей нормальной силой. Потеря сцепления верхнего правого управляемого колеса с дорогой сопровождается скачкообразным уменьшением силы трения колеса с дорогой, то уменьшает суммарную боковую реакцию на обоих колесах, препятствующую боковому перемещению транспортного средства. При установке управляемых колес с углом схождения, отличным от нуля, на них создаются дополнительные боковые силыйУ, , равные по величине и противоположные по направлению (фиг. 3 и 4). Эти дополнительные боковые силы складываются с боковыми силами, обусловленными действием внешней боковой силы. Для предотвращения потери сцепления боковые силы на управляемых колесах должны быть пропорциональны нормальньм силам, действующим на эти колеса. Чем больше колесо нагружено нормальной силой, тем больше величина предельной по сцеплению боковой силы, реализуемой этим колесом, т. е. тем большую величину боковой силы можно реализовать на этом колесе без потери сцепления. По предлагаемому способу при движении транспортного средства при действии на него внешней боковой силы, т. е. для случая , когда нормальные силы на обоих управляемых колесах различны, устанавливают тако угол схождения, чтобы результирующие боковые силы на каждом управляемом колесе были направлены в одну сторон и пропорциональны нормальным силам, действующим на соответствующие колеса. Для этого при движении транспорт ного средства дополнительно измеряют нормальные силы, действующие на управляемые колеса. Если нормальные силы на обоих управляемых колесах различны, то регулируют угол схождения, создавая дополнительные боковые силы, обусловленные углом схождения, и регулировку угла схождения заканчивают при достижении одинакового направления боковых сил и равенства отношений боковых и нормальных сщ н обоих управляемых колесах,т.е. при вы полнении условия Yn «п При выполнении указанных действий результирующая боковая сила на каждом управляемом колесе будет уменьшаться при уменьшении нормальной сил предотвращая тем самым потерю сцепления этим колесом, а при увеличении нормальной силы боковая сила будет увеличиваться, увеличивая силу сопро тивления боковому перемещению транспортного средства. Способ реализуется следующим образом. На транспортном средстве установлены датчики 1 боковых сил, действующих на управляемые колеса 2 (фиг, 1), датчики 3 нормальных сил, действующих на те же колеса, подключенные к блоку 4 управления, вырабатывающему управляющий сигнал на исполнительный орган 5, регулируюи{нй длину поперечной тяги 6 и тем самым схождение управляемых колес. При движении транспортного средства под действием боковых сил (на повороте, на косогоре, под действием бокового ветра) сигнал с датчиков боковых 1 и нормальных 3 сил, действующих на колеса, поступает в блок 4 управления, который в функции этих сигналов вырабатывает команду к управлению на исполнительный орган регулирующий схождение колес таким образом, чтобы боковые силы на управляемых колесах быпи бы направлены в одну сторону (против внешней боковой силы, действующей на транспортное средство) и были бы пропорциональны нормальным силам, действующим на эти же колеса. Для этого исполнительный орган сообщает управляемым колесам определенный угол схождения, значение которого можно определить следующим образом. Предположим, что на управляемый мост транспортного средства действует внешняя боковая сила , которая при параллельно поставленных колесах вызывает на них боковые реакции от поверхности дороги Yv Эти силы направлены в одну сторону и равны по величине. При угле 8- схождения управляемых колес появляются дополнительные боковые силы aX, действующие с стороны поверхности дороги на колеса. Эти силы равны по величине и направлены внутрь управляемого моста навстречу друг другу A AYn-VCCr где К - коэффициент увода колеса; сГ - угол увода колеса. В рассматриваемом случае угол уво-, да равен половине угла схождения и тогда | В соответствии с предлагаемым способом отношение суммарных боковых сил должно равняться отношению нормальных сил :ii 05Ул-лУА Уравнение равновесия вертикаль ных сил й,Ял-а 0, где G - нагрузка, приходящаяся Ha управляемый мост. Уравнение равновесия моментов действующих на управляемый мост в поперечной плоскости Н - р .ii- -V-b П ,. 2 fi а Из решения этих двух уравнений находим нормальные силы, действую на колеса в функции боковой силы «Л-.«-|Подставляя эти значения в (2) ходим значение боковых сил дУд ,д необходимых для образования сумма ных боковых реакций, пропорционал ных нормальным силам и зависящих угла схождения управляемых колес 8 Подставляя в (1) найденное значение , определяем угол увода и необходимое значение угла схождения управляемых колес А лУл ТпБлок управления вырабатывает команды управления на исполнительный орган образом, чтобы обеспечить указанную зависимость угла схождения от внешней боковой силы, действующей на транспортное средство. При прямолинейном движении транспортного средства по горизонтальной поверхности в соответствии с формулой 3 угол схождения равен нулю, т.е. колеса сохраняют параллельность, между собой. Таким образом согласно прёдлагаемому способу предотвращается потеря сцепления с дорогой одного управляемого колеса раньше другого, что повьппает боковую устойчивость при движении транспортного средства при действии на него внешней боковой силы. Предлагаемый способ позволяет повысить боковую устойчивость при движении транспортного средства, снизить износ шин и расход топлива.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения коэффициента поперечного сцепления эластичной шины автомобильного колеса | 2017 |
|
RU2661555C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ | 2012 |
|
RU2498271C2 |
| Способ установки схождения управляемых колес транспортного средства | 1978 |
|
SU746242A1 |
| Способ автоматического регулирования схождения управляемых колёс автотранспортного средства в процессе движения | 2024 |
|
RU2824532C1 |
| Передний управляемый мост с изменяемыми углами установки колес транспортного средства | 1980 |
|
SU927614A1 |
| ПОДВЕСКА ЗАДНИХ КОЛЕС И МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2619147C2 |
| Управляемый мост транспортного средства | 1974 |
|
SU1068320A1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ УСТАНОВКИ СХОЖДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС В ПРОЦЕССЕ ДВИЖЕНИЯ | 2006 |
|
RU2333470C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
СПОСОБ УСТАНОВКИ ОПТИМАЛЬНОГО УГЛА СХОВДЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА, по которому измеряют боковые силы на обоих управляемых колесах при движении и регулируют угол схождения в зависимости от величины и направления этих сил, отличающийся тем, что, с цёЛью повьшения поперечной устойчивости по скольжению транспортного средства при воздействии на него внешней боковой силы, дополнительно измеряют воздействующие на оба управляемых колеса силы, нормальные к поверхности дороги, устанавливают величину угла схождения, при которой направления боковых сил совпадают, а отношение величины боковых сил равно отношению величин сил, нормальных к поверхности дороги. (Л с ю оо
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического регулирования схождения управляемых колес транспортного средства | 1980 |
|
SU905692A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
