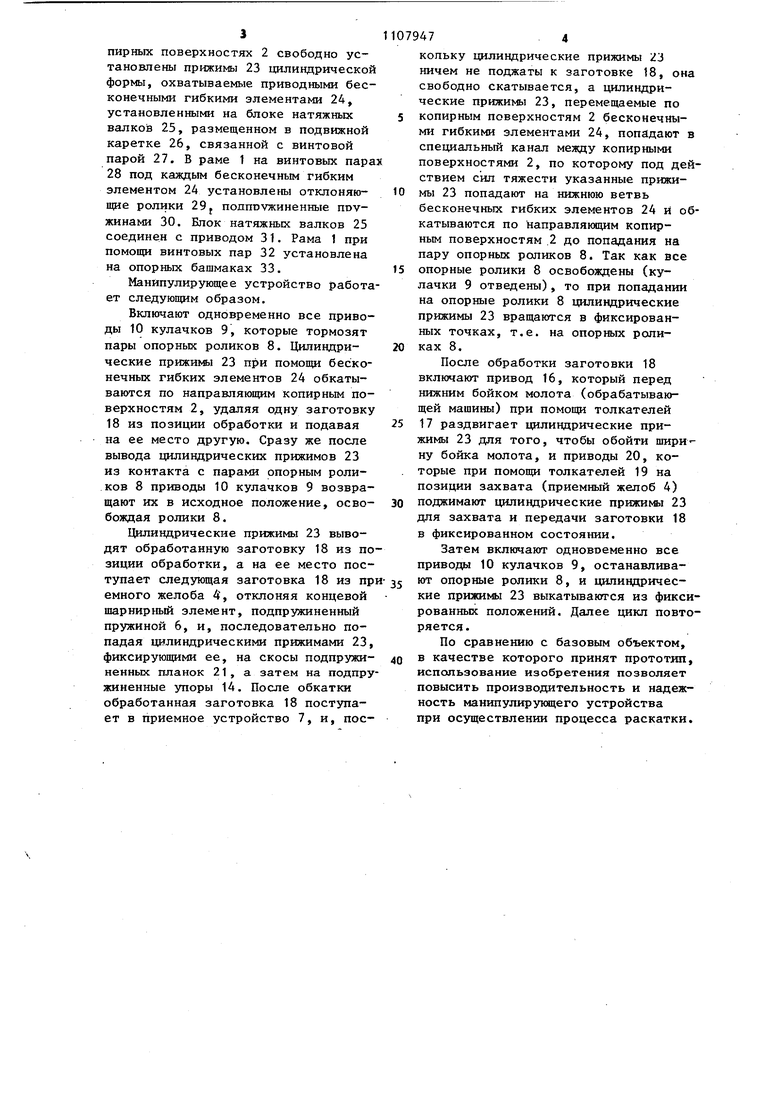
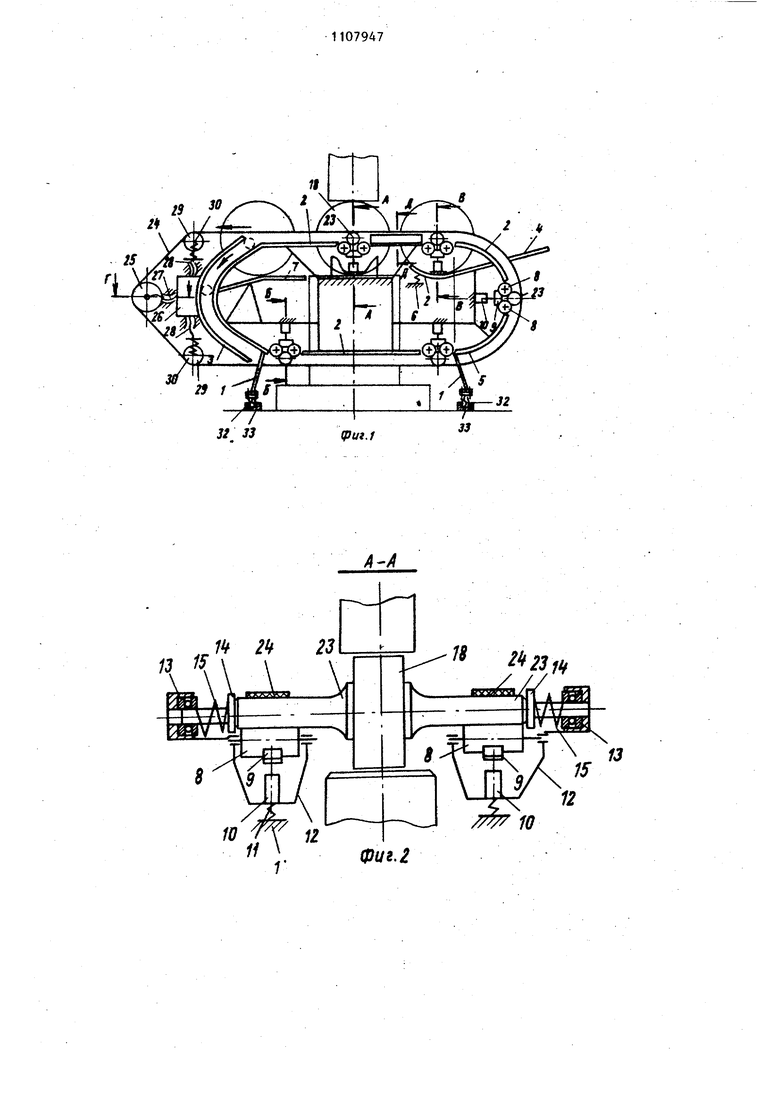
I Изобретение относится к вспомогательному оборудованию кузнечно-п совых цехов, а именно, к манипулирующим устройствам, и быть и пользовано при механизации процесса обкатки дискообразных заготовок Известно манипулирукщее устройство, используемое при осадке заго вок, содержащее зажимные губки, в торых подвижно смонтированы каретк несущие захваты IJ. Недостаток известного устройства - ограниченный диапазон размеро по диаметру обрабатываемых заготовок. Наиболее близким к изобретению по технической сущности и достигае мому результату является манипулир щее устройство к обрабатывающей ма шине, содержащее раму, два бесконе ных гибких элемента, выполненных подвижными между позициями захвата заготовки и ее обработки и расположенных по обе стороны относитель но направления перемещения заготов ки на приводных и натяжных валках, смонтированных на каретках 121. Недостатки данного манипулирующего устройства заключаются в невысокой его производительности и ма лой надежности при осуществлении процесса обкатки заготовок. Цель изобретения - повыщение пр изводительности и надежности манипулирующего устройства при обкатке заготовок. Указанная цель достигается тем, что манипулирующее устройство к обрабатывающей машине, преимущественно для обкатки дискообразных заготовок, содержащее раму, два бе конечных гибких элемента, вьтолненных подвижными между позициями захвата заготовки и ее обработки и расположенных по обе стороны относительно направления перемещения заготовки на приводных и натяжных валках, смонтированных на каретках снабжено комплектом попарно соосных прижимов заготовки цилиндрической формы, размещенных в каретках перпендикулярно направлению перемещения гибких элементов, опорными роликами с приводными тормозными узла ми, размещенныт м в каждой каретке вдоль гибкого элемента, приводными толкателями и подпружиненными упорами, установленными соответственно 947 на позициях захвата и обработки заготовки с возможностью взаимодей- ствия с нерабочими торцами прижимов, а также подпружиненными планками, размещенными между позициями захвата и обработки заготовки с возможностью взаимодействия с нерабочими торцами прижимов, при этом бесконечные гибкие элементы вьшолнены в виде параллельно расположенных ветвей, перпендикулярных осям прижимов, каретки выполнены с направляющими копирными поверхностями, образующие которьк параллельны осям прижимов, а прижимы размещены между соответствующими направляющими копирными поверхностями кареток и ветвями гибких элементов с возможностью взаимодействия с ними своими боковыми поверхностями. Каждый из тормозных узлов опорных роликов может быть вьшолнен в виде кулачка. На фиг. 1 изображено манипулирующее устройство, общий вид; на фиг. 2 - сечение А-А на фиг. 1j на фиг. 3 - сечение Б-Б на фиг. Г, на фиг. 4 -г сечение В-В на фиг. 1, на фиг. 5 - сечение Г-Г на фиг. 1J на фиг. 6 - сечение Д-Д на фиг. 1. Устройство содержит раму 1, выполненную с направляющими копирными поверхностями 2 и 3, приемный желоб 4 с концевым шарнирным элементом 5, подпружиненным пружиной 6, и приемное устройство 7. В разрывах между копирными поверхностями 2 в опорах вращения рамы 1 установлены опорные ролики 8, а под каждой парой роликов 8 установлены тормозные узлы в виде кулачков 9 с приводами их перемещения 10. 1 С обеих сторон позиции обработки над парой опорных роликов 8 в подвижньк подпружиненных пружинами 11 рамках 12 установлены в опорах вращения 13 упоры 14, подпружиненные пружинами 15. В зоне выхода з копирных поверхностей 3 под паой опорных роликов 8 установлен ривод 16 с толкателями 17. В позиции захвата заготовок 18 над опорными роликами 8 с обеих сторон становлены толкатели 19 с приводаи 20. Перед позицией обработки с беих сторон установлены планки 21, одпружиненные пружинами 22, на ко3
пирных поверхностях 2 свободно установлены прижимы 23 цилиндрической формы, охватываемые приводными бесконечными гибкими элементами 24, установленными на блоке натяжных валков 25, размещенном в подвижной каретке 26, связанной с винтовой парой 27. В раме 1 на винтовых пара 28 под каждым бесконечным гибким элементом 24 установлены отклоняющие ролики 29J подппужиненные novжинами 30. Блок натяжных валков 25 соедине:н с приводом 31. Рама 1 при помощи винтовых пар 32 установлена на опорных башмаках 33.
Манипулирующее устройство работает следующим образом.
Включают одновременно все приводы 10 кулачков 9, которые тормозят пары опорных роликов 8. Цилиндрические прижимы 23 при помощи бесконечных гибких элементов 24 обкатываются по направляющим копирным поверхностям 2, удаляя одну заготовку 18 из позиции обработки и подавая на ее место другую. Сразу же после вывода циливдрических прижимов 23 из контакта с парами опорным роликов 8 приводы 10 кулачков 9 возвращают их в исходное положение, освобождая ролики 8.
Цилиндрические прижимы 23 выводят обработанную заготовку 18 из позиции обработки, а на ее место поступает следующая заготовка 18 из премного желоба 4, отклоняя концевой щарнирный элемент, подпружиненный пружиной 6, и, последовательно попадая цилиндрическими прижимами 23, фиксирующими ее, на скосы подпружиненных планок 21, а затем на подпружиненные упоры 14. После обкатки обработанная заготовка 18 поступает в приемное устройство 7, и, пос474
копьку цилиндрические прижимы 23 ничем не поджаты к заготовке 18, она свободно скатывается, а цилиндрические прижимы 23, перемещаемые по копирным поверхностям 2 бесконечными гибкими элементами 24, попадают в специальный канал мелоду копирными поверхностями 2, по которому под действием сил тяжести указанные прижимы 23 попадают на нижнюю ветвь
бесконечных гибких элементов 24 и обкатываются по направляюпщм копирным поверхностям .2 до попадания на пару опорных роликов 8. Так как все
опорные ролики 8 освобождены (кулачки 9 отведены), то при попадании на опорные ролики 8 цилиндрические прижимы 23 вращаются в фиксированных точках, т.е. на опорных роликах 8.
После обработки заготовки 18 включают привод 16, который перед нижним бойком молота (обрабатывающей машины) при помощи толкателей
17 раздвигает цилиндрические прижимы 23 для того, чтобы обойти шири-ну бойка молота, и приводы 20, которые при помощи толкателей 19 на позиции захвата (приемный желоб 4)
поджимают цилиндрические прижигл 23 для захвата и передачи заготовки 18 в фиксированном состоянии.
Затем включают одновременно все приводы 10 кулачков 9, останавливают опорные ролики 8, и цилиндрические прижимы 23 выкатываются из фиксированных положений. Далее цикл повторяется .
По сравнению с базовым объектом,
в качестве которого принят прототип, использование изобретения позволяет повысить производительность и надежность манипулирукнцего устройства при осуществлении процесса раскатки.
II
.-,,
29
1 -f II ffk /
tpui.f
33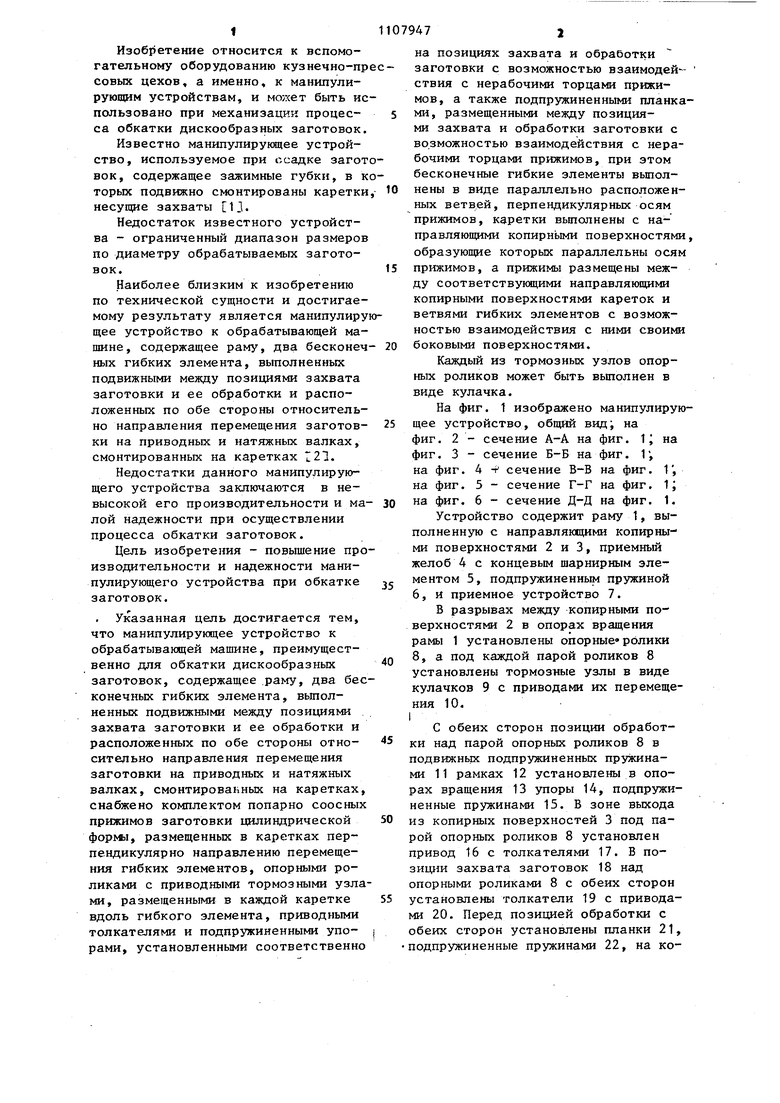
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный кольцераскатныйСТАН | 1979 |
|
SU814530A1 |
| Многопозиционный кольцераскатный стан | 1978 |
|
SU697234A1 |
| Кольцераскатный роторный автомат | 1975 |
|
SU551099A1 |
| Конвейер для межоперационного перемещения заготовок | 1985 |
|
SU1294721A1 |
| УСТРОЙСТВО для ПОШТУЧНОЙ ВЫДАЧИ ДЛИННОМЕРНЫХ ЗАГОТОВОК ИЗ ПАКЕТА | 1967 |
|
SU194640A1 |
| ЭТИКЕТИРОВОЧНАЯ МАШИНА | 2006 |
|
RU2319647C1 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ЗАУСЕНЦЕВ С МЕТАЛЛИЧЕСКИХ ПОЛОС | 1996 |
|
RU2111816C1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Манипулирующее устройство | 1979 |
|
SU912389A1 |
1. МАНИПУЛИРУЩЕЕ УСТРОЙСТВО К ОБРАБАТЫВАЮЩЕЙ МАШИНЕ, преимущественно для-обкатки дискообразных заготовок, содержащее раму, два бесконечных гибких элемента, выполненных подвижными между позициями захвата заготовки и ее обработки и расположенных по обе стороны относительно направления перемещения заготовки на приводных и натяжных валках, смонтированных на каретках, отличающееся тем, что, с целью повышения производительности и надежности, оно снабжено комплектом попарно соосных прижимов заготовки цилиндрической формы, размещенных в каретках перпендикулярно направлению перемеще-, . ния гибких элементов, опорными роликами с приводными тормозными узлами, размещенными в каждой каретке вдоль гибкого элемента, приводными толкателями и подпружиненными упорами, установленными соответственно на позициях захвата и обработки заготовки с возможностью взаимодействия с нерабочими торцами прижимов, а также подпружиненными планками, размещенными между позициями захвата и обработки заготовки с возможностью взаимодействия с нерабочими торцами прижимов, при этом бесконечные гибкие элементы выполнены в виде параллельно расположенных ветвей, перпендикулярных осям прижимов, каретки вьтолнены с направляющими копирными поверхностями, образующие которых параллельны осям, прижимов, а прижимы размещены между соответствующими направляющими копирными пoвepxнocтя вi кареток и ветвями гибких элементов с возможностью взаимодействия с ни ми своими боковыми поверхностями. СО 4 2. Устройство по п. 1, отличающееся тем, что каждый из тормозных узлов выполнен в виде кулачка.
/ / 23
/
12
10
Фиг, I
8
Ж1
/ДГУУТЯЯр
/ /V/vy/v/x/vji
t 1717 г 3
s-s
16,
г
/
(риг.З В-В
20 19
//vx/r/y:; 7
19
ff
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| КЛЕЩИ ДЛЯ КОВОЧНОГО МАНИПУЛЯТОРАLL „LfiJi. I.. .л Т- г.л:;;т.:з --^l т:::;::-м:с::.'пBi'iJA'^j'i JJ'xA I | 0 |
|
SU173104A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Манипулирующее устройство | 1979 |
|
SU912389A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
