(54 МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулирующее устройство к обрабатывающей машине | 1983 |
|
SU1107947A1 |
| Захват кузнечного манипулятора | 1980 |
|
SU912391A1 |
| Манипулятор для перемещения заготовок | 1983 |
|
SU1138209A1 |
| Станок для резки непрерывно движущейся ленты на мерные изделия | 1984 |
|
SU1240601A1 |
| Линия для оребрения труб методом спиральной навивки ленты | 1989 |
|
SU1690885A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Устройство для неразрушающего контроля изделий | 1986 |
|
SU1388787A1 |
| Устройство для подачи штамповок | 1987 |
|
SU1473895A1 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЛИННОМЕРНОЙ ТРУБЫ | 1969 |
|
SU234179A1 |
| Установка для продольной и поперечной резки бумажного полотна | 1987 |
|
SU1532306A1 |
1
Изобретение относится к вспомогательно.му оборудованию производства изготовления изделий, а именно к манипулирующим устройствам.
Известно манипулирующее устройство, содержащее основной и дополнительный захватные органы, выполненные в виде двух приводных бесконечных гибких ветвей, расположенных с возможностью встречного вращения на каретках, одна из которых выполнена подвижной 1.
Недостатком известного манипулирующего устройства является невозможность его использования для .манипулирования заготовками в процессе их осадки на ковочном оборудовании..
Цель изобретения - расщирение технологических возможностей устройства за счет обеспечения возможности манипулирования заготовками в процессе их осадки на ковочном оборудовании.
Цель достигается тем, что в манипулирующем устройстве, содержащем основной и дополнительный захватныеорганы, выполненные в виде двух приводных бесконечных гибких ветвей, расположенных с возможностью встречного вращения на каретках.
одна из которых выполнена подвижной, вторая каретка также выполнена подвижной, бесконечные гибкие ветви подпружинены относительно обрабатываемой заготовки, при этом приводы вращения гибких ветвей выполнены в виде щаговых двигателей, один из которых снабжен конечным выключателем, раз.мещенны.м с возможностью взаимодействия с соответствующей гибкой ветвью.
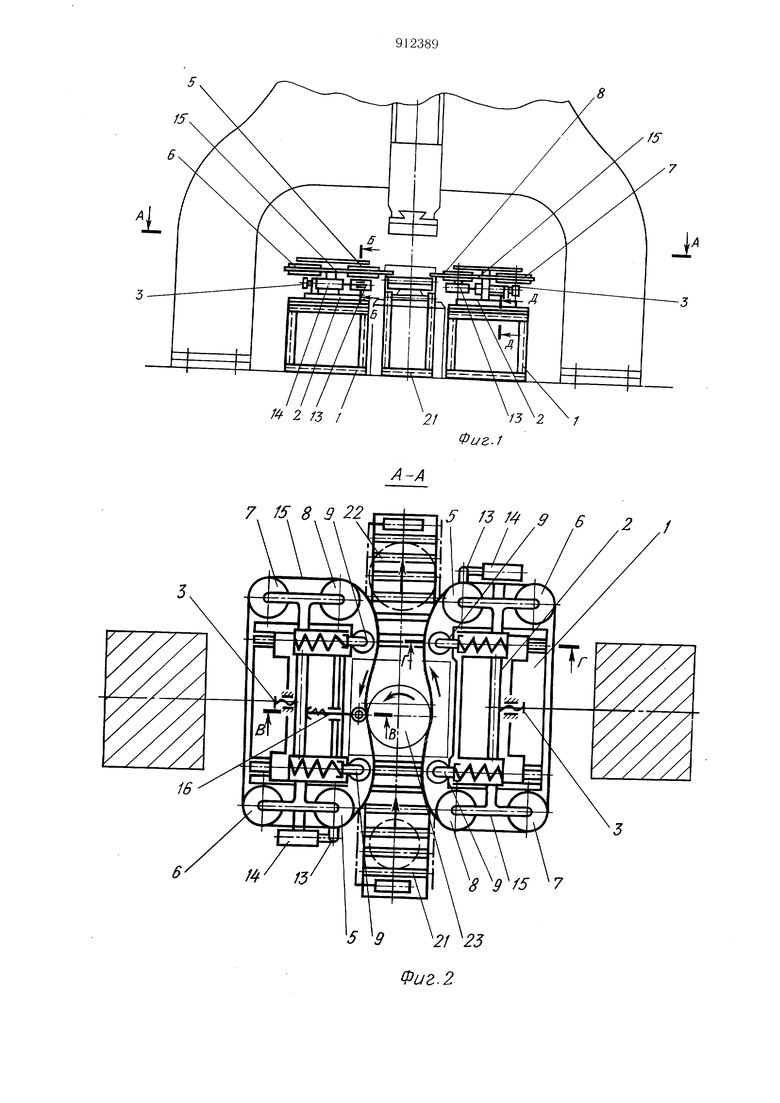
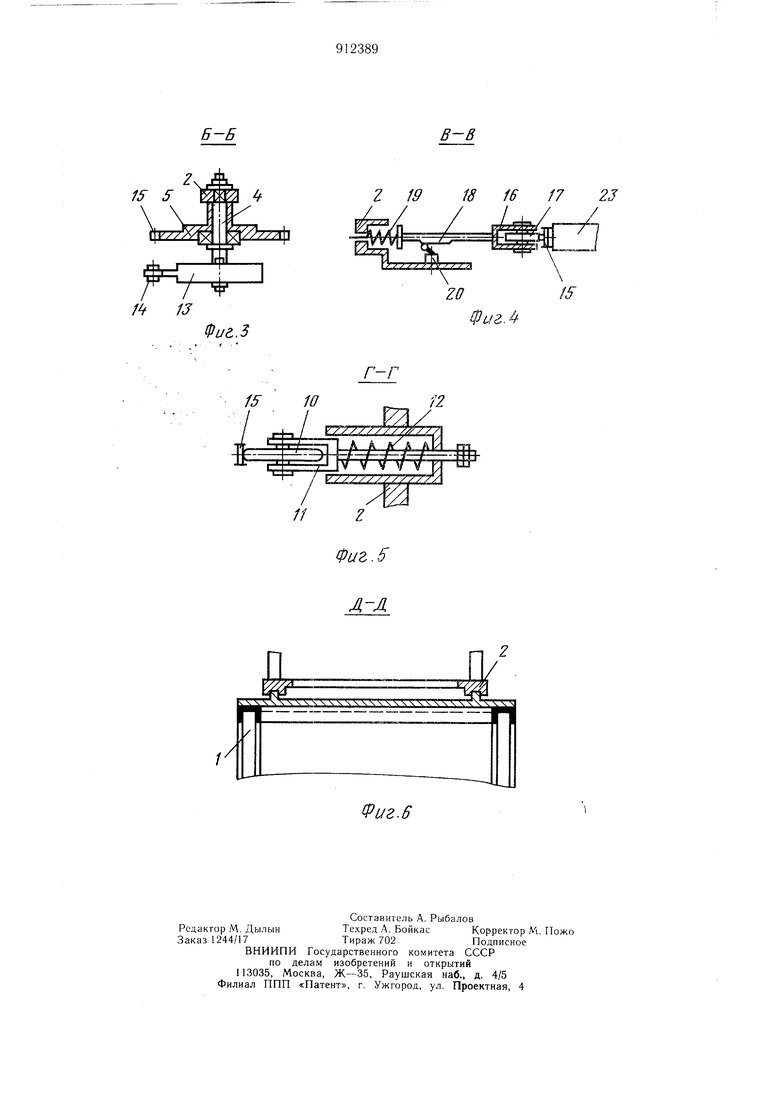
На фиг. 1 изображено манипулирующее устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. б - разрез Д-Д на фиг. 1.
Манипулирующее устройство содержит основные ра.мы 1, на которых установлены подвижные каретки 2, передвигаемые винтами 3. На подвижных каретках 2 установлены в опорах вращения 4 приводные эле2Q менты 5 и неприводные элементы 9, состоящие из роликов 10, вилок-щтоков 11 и пружин 12. Приводные элементы 5 связаны через обгонные муфты 13 с щаговыми приводами, например пневмоцилиндрами 14. Приводные элементы 5 и неприводные элементы 6, 7 и 8 охватываются бесконечными гибкими элементами, например цепями 15. В одной из подвижных кареток 2 установлен исполнительный орган 16, состоящий из ролика 17, вилки-штока с лыжей 18, пружины 19 и конечного выключателя 20. Между корпусами основных рам 1 размещены задающее устройство 21 и приемное устройство 22, выполненные, например, в виде приводных рольгангов, по которым движется заготовка 23. Заготовка 23 подается в зазор между бесконечными гибкими элементами, например цепями 15, один из которых (на фиг. 2 правая ветвь) постоянно движется в направлении зоны обработки задающим устройством, например приводным рольган Ч)м 21. Заготовка 23 захватывается движущимся гибким элементом 15 и обкатывает временно неподвижный гибкий элемент 15, сжимая через ролики 10 и вилкн-щтоки 11 пружину 12, т. е. изменяя положение натяжных элементов 9, увеличивает зазор между гибкими элементами 15 и закатывается в зону обработки. При попадании в зону обработки заготовка 23 через гибкий элемент 15 нажиг 1ает на ролик 17, сжимая пружину 19, и лыжа 18 вилки-штока включает конечный выключатель 20, дающий команду па включение шагового привода, напри.мер ппевмоцилиндра 14 (на фиг. 2 левая ветвь), который в свою очередь через обгонную муфту 13 и приводной элемент 15 приводится в движе ще, обратное движению другого бесконечного 1ибкого элемента 15 (на фиг. 2 левая ветвь). Заготовка 23, охватываемая бесконечны.ми гибкими элементами 15, движущимися навстречу друг другу с одинаковой скоростью, поворачивается вокруг своей оси при HaHeceiHdH удара ковочным агрегатом на угол, заданный величиной хода шаговых приводов 14. После окончания обработки щаговый привод временно неподвижного бесконечного гибкого элемента 15 (на фиг. 2 левая ветвь) останавливается и поковка 23 но не.му обкатывается постоянно движущимся бесконечным гибким элементом 15 до выдачи ее в приемное устройство, например приводной рольганг 22. Одновременно с выдачей готовой поковки задающим устройство.м 21 задается следующая заготовка 23 в зазор между бесконечными гибкими элементами 15, один из которых постоянно движется (на фиг. 2 правая ветвь), и цикл повторяется. Формула изобретения Манипулирующее устройство, содержащее основной и дополнительный захватные органы, выполненные в виде двух приводных бесконечных гибких ветвей, расположенных с возможностью встречного вращения на каретках, одна из которых выполнена подвижной, отличающееся тем, что, с целью расщирения технологических возможностей за счет обеспечения воз.можности манипулирования заготовка.ми в процессе их осадки на ковочном оборудовании, вторая каретка также выполнена подвижной, бесконечные гибкие ветви подпружинены относительно обрабатываемой заготовки, при этом приводы вращения гибких ветвей выполнены в виде щаговых двигателей, один из которых снабжен конечным выключателем, размещенным с возможностью взаимодействия с соответствующей гибкой ветвью. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 483249, кл. В 27 L 1/00, 1973 (прототип). /- 2 /J 7 15 8 3 22 /J / 5I II/ I / 2 f / ,/
Б-Б
в-в
1 5
1 и
Фиг.З
п
fPu3.6
