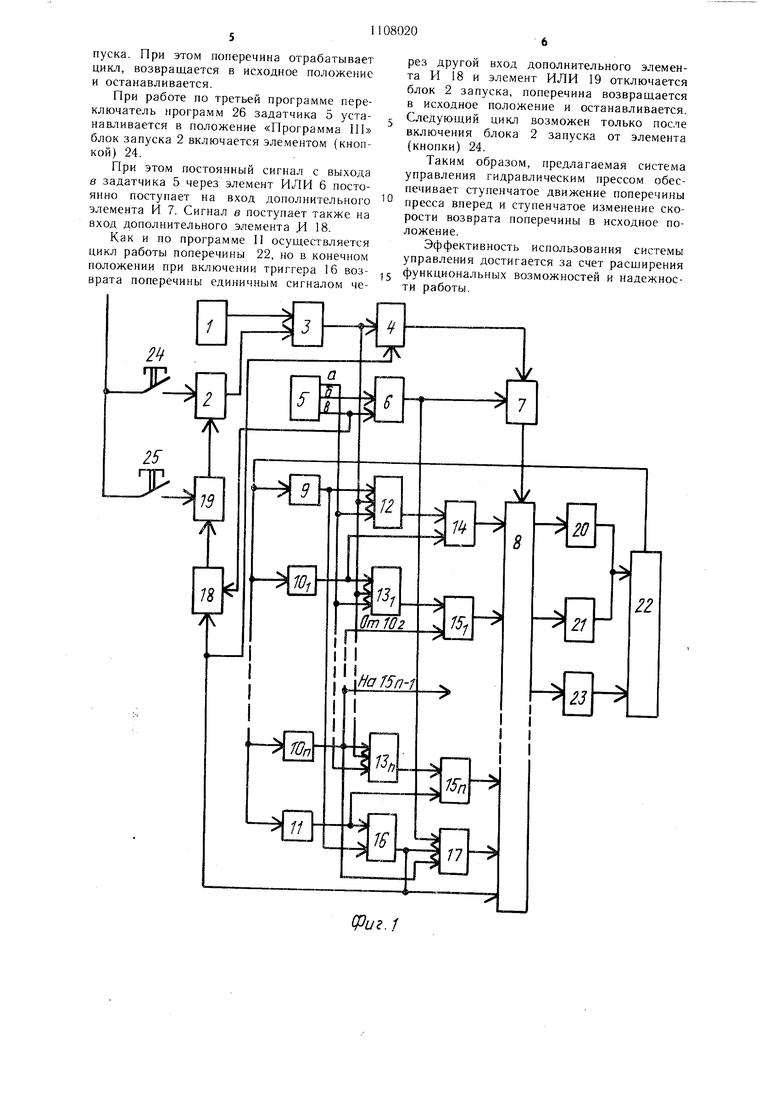
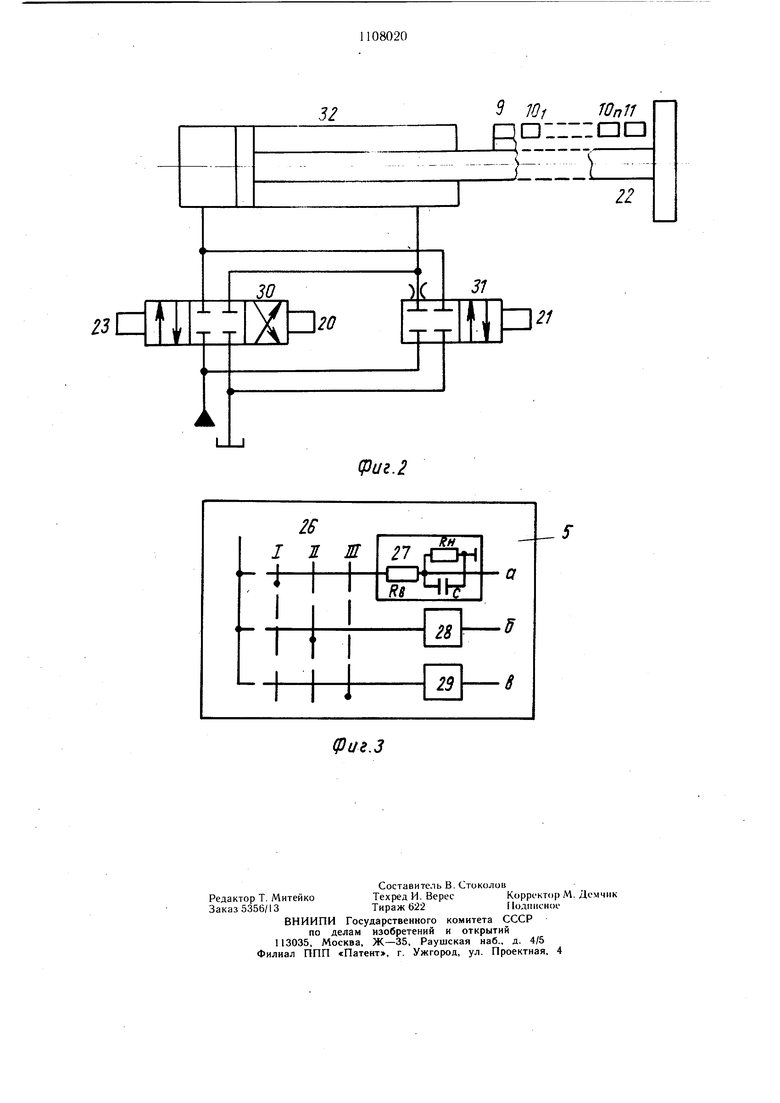
Изобретение относится к машиностроению, в частности к конструкции оборудования для обработки давлением. Известна система управления гидравлическим прессом, сЬдержащая блок запуска с элементами включения и отключения и формирователь сигналов, подключенные через элемент И к триггеру управления, дешифратор, датчики конечных положений исполнительного механизма, выполненного в виде поперечины пресса с цилиндром, а также электромагнитные приводы с гидроусилителями перемеш.ения поперечины 1. Однако известная система управления не обеспечивает изменения скорости возвратного хода поперечины и ступенчатого перемещения ее при рабочем ходе, что ограничивает функциональные возможности использования системы и снижает надежность ее работы. Целью изобретения является расширение функциональных возможностей и повышение надежности системы. Указанная цель достигается тем, что система управления гидравлическим прессом, содержащая блок запуска с элементами включения и отключения и формирователь сигналов, подключенные через элемент И к триггеру управления, дешифратор, датчики конечных положений исполнительного механизма выполненного в виде поперечины пресса с цилиндром, а также электромагнитные приводы с гидроусилителями перемещения поперечины, снабжена датчиками промежуточных положений поперечины с трехвходовыми элементами И по числу положений поперечины, тремя дополнительными элементами И и двумя элементами ИЛИ, задатчиком программ, триггерами подачи и возврата поперечины и электромагнитным приводом, гидроусилителем замедления обратного движения поперечины, подключенным параллельно гидроусилителю возврата поперечины в исходное положение, причем датчики промежуточных положений поперечины пресса выходами подключены к входам сброса триггеров подачи и к первым входам соответствующих трехвходовых элементов И, датчик исходного положения поперечины выходом подключен к входу сброса триггера возврата поперечины и первому входу первого трехвходового элемента И, вторыми входами трехвходовые элементы И подключены к выходу элемента И, входы которого подключены к выходам формирователя сигнала и блока запуска и третьими входами подключены к первому выходу задатчика программ, а выходами соединены с входами запуска соответствующих триггеров подачи, которые единичными выходами подключены к управляющим входам дешифратора, задатчик программ вторым выходом соединен с первым входом первого элемента ИЛИ, а третьим выходом - с вторым входом первого элемента ИЛИ и первым входом третьего дополнительного элемента И, второй вход которого соединен с входом сброса триггера управления с единичным выходом триггера возврата поперечины и дешифратором, а выход соединен с первым входом второго элемента ИЛИ, выход которого соединен с входом отключения блока запуска, второй вход второго элемента ИЛИ подключен к элементу отключения блока запуска, при этом первый дополнительный элемент И своим первым входом соединен с первым входом второго дополнительного элемента И и выходом первого элемента ИЛИ, вторым входом соединен с выходом триггера управления, а выходом подключен к управляющему входу дешифратора, второй дополнительный элемент И своим вторым входом подключен к единичному выходу триггера возврата поперечины, третьим входом соединен с выходом одного из датчиков промежуточного положения поперечины, а,выходом подключен к управляющему входу дешифратора. На фиг. 1 приведена блок-схема системы управления гидравлическим прессом; на фиг. 2 - схема привода поперечины пресса; на фиг. 3 - схема задатчика программ. Система управления гидравлическим прессом содержит формирователь сигналов 1 запускающих импульсов и блок 2 запуска, подключенные параллельно к входам элемента И 3, триггер 4 управления, входом запуска подключенный к выходу элемента И 3, задатчик 5 программ, первый элемент ИЛИ 6, первый дополнительный элемент И 7, дешифратор 8, датчик 9 исходного положения поперечины, датчики промежуточных положений поперечины 101- Юн и конечного положения ее 11, трехвходовые элементы И 12, 13т-13ч, триггеры 14, ISf-lSn подачи, триггер 16 возврата поперечины, второй 17 и третий 18 дополнительные элементы И, второй элемент ИЛИ 19, электромагнитные приводы 20 возврата, и замедления 21 поперечины 22, а также электромагнитный привод 23 подачи вперед поперечины 22. Элементы включения 24 и отключения 25 блока 2 запуска выполнены в виде кнопок. Задатчик программ 5 содержит переключатель 26 и преобразователи сигналов 27, 28 и 29, каждый из которых состоит из резисторов RB и R делителя напряжения и конденсатора С, подключенного параллельно резистору низкого потенциала R. Электромагнитные приводы 20 и 23 выполнены в виде электромагнитов, смонтированных на гидроусилителе 30, а привод 21 - в виде электромагнита, смонтированного на гидроусилителе 31. Поперечина 22 закреплена на штоке гидроцилиндра 32. Система управления гидравлическим прессом работает следующим образом. В исходном состоянии блок 2 запуска отключен, на выходе элемента И 3 сигнал нулевого потенциала, триггеры 4, 14, 15i 15f| и 16 находятся в сосгоянии сброса, датчик 9 исходного положения включен, электромагнитные приводы 20, 21 и 23 обесточены. При работе по первой программе переключатель 26 задатчика 5 устанавливается в положение «Программа I. При этом, с выхода а подается постоянный единичный сигнал на третьи входы трехвходовых элементов И 12, 13j-13it . Элементом включения 24 включается блок 2 запуска, на выходе которого появляется постоянный единичный сигнал, поступающий на второй вход элемента И 3. При появлении импульса с формирователя 1 сигнала, поступающего через первый вход элемента И 3 на вторые входы элементов И 12, 13i - 13, и сигнала датчика 9 исходного положения - через первый вход элеме 1та И 12, запускается триггер 14 и через дещифратор 8 включает электромагнитный привод 23 гидроусилителя 30 подачи поперечины 22 (цилиндром 32), которая перемещается до датчика lOi промежуточного положения. Сигналом датчика lOj сбрасывается триггер 14, и через дещифратор .8 отключается привод 23. Поперечина 22 останавливается. Следующий импульс с формирователя 1 сигнала через элемент И 3 вновь поступает на вторые входы элементов И 12, 13i-13n. От элемента И 13i, имеющего соответственно на первом и третьем входах сигналы от датчика lOj и задатчика 5 программ, включается триггер IS-j подачи, а через дещифратор 8 - привод 23. Поперечина 22 перемещается до следующего датчика промежуточного положения, по сигналу которого сбрасывается триггер I5i и отключается привод 23. Поперечина 22 вновь останавливается. Аналогично ооеспечивается включение привода 23 и движение поперечины 22 от всех последующих датчиков промежуточных положений до датчика 11 конечного положения. При этом осуществляется последовательное ступенчатое прессование изделия. При включении датчика 11 конечного положения сбрасывается триггер 15|| и включается триггер 16 возврата поперечины, единичным сигналом которого через дешифратор 8 включается привод 20 возврата поперечины в исходное положение. Поперечина 22 цилиндром 32 возвращается до датчика 9 исходного положения. По сигналу датчика 9 сбрасывается триггер 16, отключается привод 20 и поперечина 22 останавливается в исходном положении. Цикл прессования закончен. В качестве промежуточных lOi -lOn и конечного 11 датчиков положений могут применяться путевые бесконтактные переключатели, датчики давления, а также элементы времени. При применении датчиков давления остановки поперечины в промежуточных положениях осуществляются при достижении заданного давления каждой ступени прессования. При применении элементов времени остановки поперечины в промежухочиых положениях осуществляются через заданные промежутки времени. При поступлении следующих импульсов с формирователя 1 сигналов циклы прессования повторяются. Отключение пресса осуществляется подачей сигнала элементом отключения 25 (кнопкой) через элемент ИЛИ 19 на вход отключения блока 2 запуска. Отключение может быть осуществлено как в исходном, так и в промежуточных положениях поперечины. При работе по второй программе переключатель программ 26 задатчика 5 устанавливается в положение «Программа И, включается блок 2 запуска элементом (кнопкой) 24. От задатчика 5 nporpaMiyi через выход б и элемент ИЛИ 6 поступает постоянный сигнал на входы элементов И 7 и 17. При появлении импульса с формирователя 1 сигналов через элемент И 3 включается триггер 4 управления, по единичному сигналу которого через элемент И 7 и дещифратор 8 включается привод 23 и поперечина 22 перемещается до датчика конечного положения 11 поперечины. По сигналу датчика 11 включается триггер 16 возврата поперечины, единичным сигналом которого сбрасывается триггер 4 управления, подается сигнал на второй вход дополнительно элемента И 17, и через дешифратор 8 включается привод 20 возврата поперечины в исходное положение. При проходе поперечиной датчика промежуточного положения 10и сигнал датчика поступает на третий вход дополнительного элемента И 17 и через дещифратор 8 отключает привод 20 возврата поперечины 22 и включает привод 21 гидроусилителя 31 замедления хода поперечины. Поперечина замедленно проходит датчик промежуточного положения Юц.. При этом осуществляется протяжка готового изделия. При исчезновении сигнала датчика 10 отключается привод 21 замедления, включается привод 20 возврата и поперечина 22 возвращается в исходное положение. По сигналу датчика 9 исходного положения сбрасывается триггер 16 в нулевое состояние, снимается сигнал сброса с триггера 4 управления, и по сигналу формирователя 1 сигналов цикл работы пресса повторяется. Откаючеиие пресса осуществляется сигналом элемента (кнопки) 25 через элемент ИЛИ 19 на вход отключения блока 2f запуска. При этом поперечина отрабатывает цикл, возвращается в исходное положение и останавливается.
При работе по третьей программе переключатель программ 26 задатчика 5 устанав тивается в положение «Программа ill блок запуска 2 включается элементом (кнопкой) 24.
При этом постоянный сигнал с выхода в задатчика 5 через элемент ИЛИ 6 постоянно поступает на вход дополнительного элемента И 7. Сигнал в поступает также на вход дополнительного элемента J 18.
Как и по программе П осуществляется цикл работы поперечины 22, но в конечном положении при включении триггера 16 возврата поперечины единичным сигналом через другой вход дополнительного элемента И 18 и элемент ИЛИ 19 отключается блок 2 запуска, поперечина возвращается в исходное положение и останавливается. Следующий цикл возможен только после включения блока 2 запуска от элемента (кнопки) 24.
Таким образом, предлагаемая система управления гидравлическим прессом обеспечивает ступенчатое движение поперечины пресса вперед и ступенчатое из.менение скорости возврата поперечины в исходное положение.
Эффективность использования системы управления достигается за счет расширения функциональных возможностей и надежности работы.
3
3 JO,
ГОпП
оа
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления формовочным прессом | 1985 |
|
SU1268435A1 |
| Устройство программного управления шагающим конвейером | 1984 |
|
SU1177237A1 |
| Многоканальное устройство для программного управления | 1988 |
|
SU1580321A1 |
| Устройство для программного управления формовочной линией | 1987 |
|
SU1564591A1 |
| Устройство для регулирования подачи волокна к группе чесальных машин | 1989 |
|
SU1730235A1 |
| Устройство для управления формовочной машиной | 1987 |
|
SU1405945A1 |
| Способ автоматического управления выдвижкой секций базы угледобывающего агрегата и устройство для его осуществления | 1982 |
|
SU1052670A1 |
| Устройство автоматического управления выдвижкой секций базы угледобывающего агрегата | 1983 |
|
SU1120111A1 |
| Электронный блок управления кузнечно-прессовыми машинами | 1976 |
|
SU905125A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ПРЕССОМ, содержащая блок запуска с элементами включения и отключения и формирователь сигналов, подключенные через элемент И к триггеру управления, дешифратор, датчики конечных положений исполнительного механизма, выполненного в виде поперечины пресса с цилиндром, а также электромагнитные приводы с гидроусилителями перемещения поперечины, отличающаяся тем,, что, с целью расширения функциональных возможностей и повышения надежности, она снабжена датчиками промежуточных положений поперечины с трехвходовыми элементами И по числу положений поперечины, тремя дополнительными элементами И и двумя элементами ИЛИ, задатчиком программ, триггерами подачи и возврата поперечины и электромагнитным приводом, гидроусилителем замедления обратного движения поперечины, подключенным параллельно гидроусилителю возврата поперечины в исходное положение, причем датчики промежуточных положений поперечины пресса выходами подключены к входам сброса триггеров подачи и к первым входам соответствующих трехвходовых элементов И, датчик исходного положения поперечины выходом подключен к входу сброса триггера возврата поперечины и первому входу первого трехвходового элемента И, вторыми входами трехвходовые элементы И подключены к выходу элемента И, входы которого подключены к выходам формирователя сигнала и блока запуска и третьими входами подключены к первому выходу задатчика программ, а выходами соединены с входами запуска соответствующих триггеров подачи, которые единичными выходами подключены к управляющим входам дешифратора, задатчик программ вторым выходом соединен с первым входом первого элемента ИЛИ, а третьим выходом - с вторым входом первого элемента ИЛИ и первым входом третьего дополнительного элемента И, второй вход которого (Л соединен с входом сброса триггера управления, с единичным выходом триггера возврата поперечины и дешифратором, а выход соединен с первым входом второго элемента ИЛИ, выход которого соединен с входом отключения блока запуска, второй вход второго элемента ИЛИ подключен к элементу отключения блока запуска, при этом первый дополнительный элемент И своим первым входом соединен с первым входом вто00 рого дополнительного элемента И и выходом первого элемента ИЛИ, вторым вхоо : дом соединен с выходом триггера управления, а выходом подключен к управляющему входу дешифратора, второй дополнительный элемент И своим вторым входом подключен -к единичному выходу триггера возврата поперечины, третьим входом соединен с выходом одного из датчиков промежуточного положения поперечины, а выходом подключен к управляющему входу дешифратора.
U
30
Y
20
А
Фиг.З
31
)С
ц
1Л
f
(Риг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электронный блок управления кузнечно-прессовыми машинами | 1976 |
|
SU905125A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
