Изобретение относится к автоматике и может быть использовано при создании автоматизированных систем управления технологическими процессами и объектами, например агрегатными линиями.
Целью изобретения является расширение области применения.
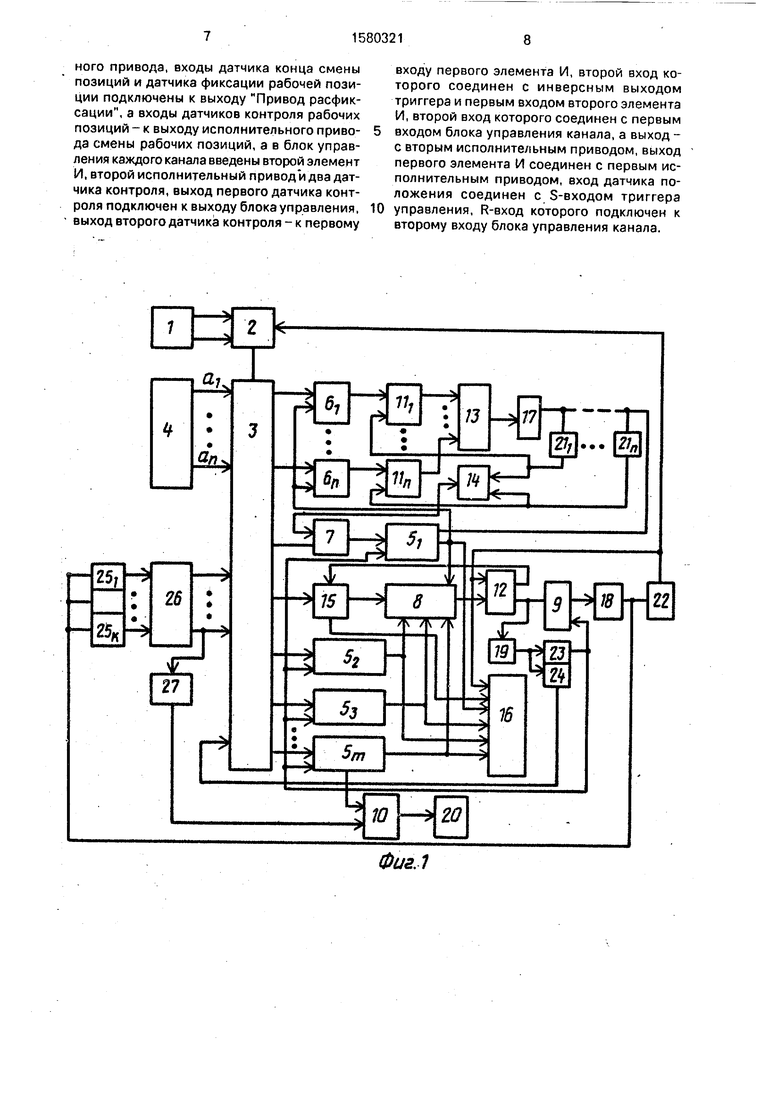
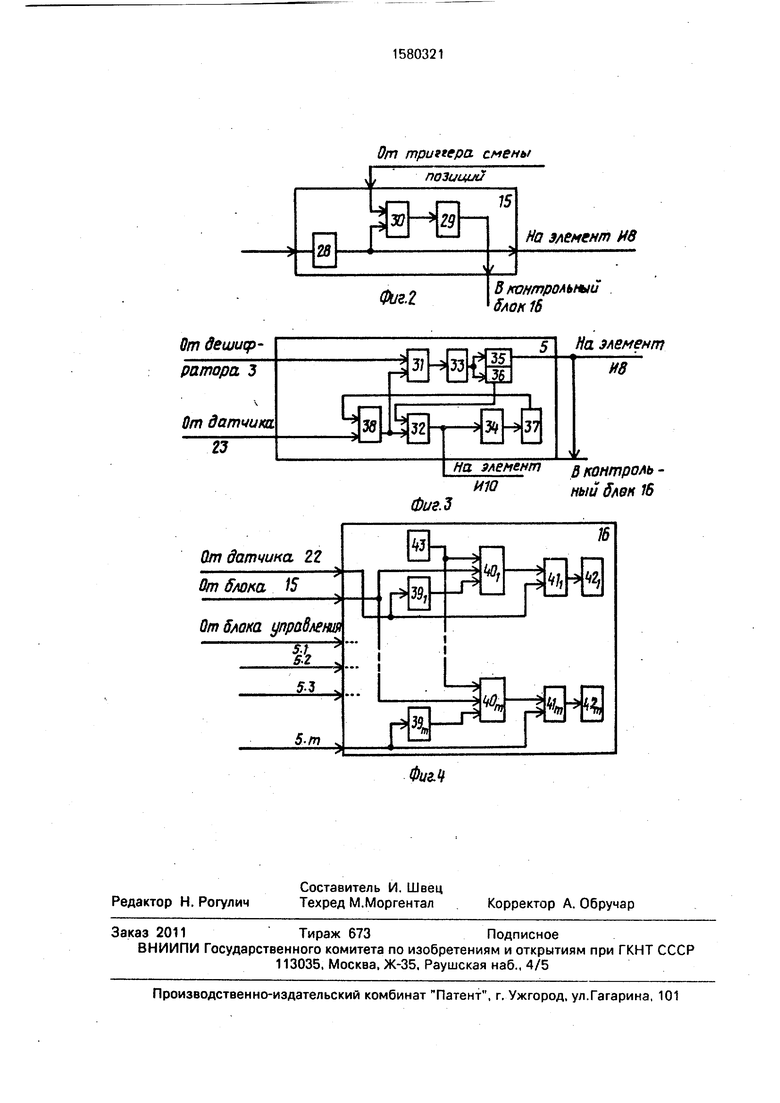
На фиг. 1 приведена структурная схема многоканального устройства; на фиг. 2 - схема блока выбора режима; на фиг. 3 - схема блоков управления; на фиг. 4 - схема цепей индикации в контрольном блоке.
Многоканальное устройство для программного управления содержит пульт 1 управления, блок 2 выбора режима, дешифратор 3, блок 4 задания программ, блок 5i...5m управления, группу элементов И
6i...6n, элементы И 7-10, группа триггеров 11i...11n адреса, триггер 12 смены позиций, элементы ИЛИ 13 и 14, блок 15 ритма, контрольный блок 16, исполнительный привод 17 манипулятора, исполнительные приводы 18...20, датчики 21i.,.21n контроля положения манипулятора, датчик 22 конца перемещения, датчик 23 конца смены позиций, датчик 24 фиксации рабочей позиции, датчики 25i...25k контроля рабочих позиций объекта, шифратор 26 и счетчик 27 импульсов.
Блок 15 ритма содержит элементы 28 и 29 задержки и элемент И 30.
Блок 5 управления содержит две после- довательно соединенных цепи из элементов И 31 и 32, исполнительных приводов 33 и 34,
сл
00
о со го
датчиков 35...37 положения и триггер 38 управления.
Контрольный блок 16 содержит последовательно соединенные цепи инверторов 39i...39m, элементов И 4СН,,,40т, элементов ИЛИ 411...41т и индикаторов 42i...42m по числу блоков управления и дополнительных исполнительных приводов с датчиками контроля, а также генератор 43 импульсов.
Устройство работает следующим образом.
В исходном положении блок 2 выбора режима отключен, обнулены все выходы дешифратора 3, отключены все блоки 5 управления и исполнительные приводы 18...20.
Для включения устройства в работу необходимо задать программу работы на бяо- ке 4. В простейшем случае блок задания программ содержит коммутирующие элементы по числу рабочих позиций, например, стола агрегатного или спутников с обрабатываемыми изделиями или пресс-формами. Включением коммутирующих элементов вводят в работу рабочие позиции или спутники.
Включением блока 2 режима с пульта 1 осуществляют пуск устройства. При фиксированном положении стола агрегата или спутников и наличии сигнала с датчика 24, фиксированное положение рабочих позиций сигналами датчиков 25i...25k через шифратор 26 в виде управляющего сигнала поступает на дешифратор 3 и в зависимости от сигналов ai.,.an задания программы, при наличии сигнала управления с блока 2 и сигнала датчика 24 единичными сигналами с выходов дешифратора 3 включает блоки 52...5т управления с исполнительными приводами 33 и 34 и датчиками 35...37 в каждом блоке, обеспечивающими обработку включенных рабочих позиций или спутников, на которые заданы программы работы.
Сигналом с дешифратора 3 через элемент И 31 включается привод 33 перемещения механизма с отключением датчика 35 до включения датчика 36. По сигналу последнего через элемент И 32 включается привод 34 до включения датчика 37, сигналом которого переключается триггер 38, снимая управляющие сигналы с выходов элементов И 31 и 32 и механизмы возвращаются в исходное положение. Сигналом датчика 35 на элемент И 8 дается разрешение на смену позиций или спутников, а в блоке 16 сигналом через элемент ИЛИ 41 постоянным светом загорается индикатор 42, указывая окончание работы блока управления.
С началом цикла с дешифратора 3 подается сигнал в блок 15 ритма на элемент 28 задержки. По истечении минимально допустимого времени работы блоков 5 управления сигнал с выхода элемента 28 подается на элемент И 8, разрешая смену позиций или спутников. Включается также элемент
29 задержки, рассчитанный на время добавления до максимально допустимого времени работы блоков 5 управления. Сигнал с выхода элемента 29 подается в контрольный блок 16 на элемент И 40 и в случае
0 задержки времени работы блока 5 или при отказе и наличии единичного выхода с элемента 39 пульсирующий сигнал с генератора 43 приводит к миганию индикатора 42 этого блока.
5 При наличии всех сигналов на входах элемента 8 сигналом с его выхода переключается триггер 12, включается привод 19 расфиксации позиций или спутников, отключается датчик 24, исчезают управляю0 шие сигналы с выходов дешифратора 3, включается датчик 23, сигналом которого сбрасываются все триггеры 38 в блоках 5 управления, включается привод 18 перемещения рабочих позиций или спутников до
5 включения датчика 22. Сигналом последнего сбрасывается триггер 12, отключаются приводы 18 и 19, возвращая механизмы в исходное положение, а в блоке 16 постоянным светом индикатор 42i укажет конец
0 смены позиций. В исходном положении вновь включится датчик 24 и отключаются датчики 22 и 23.
Одновременно со сменой рабочих позиций или спутников переключаются датчики
5 25i...25k контроля, которые через шифратор 26 подадут на дешифратор 3 следующий сигнал. Сигналы ai...an с блока 4 задания программ и сигналы с шифратора 26 в дешифратор 3 могут могут передаваться в ви0 де кодов, а шифратор и дешифратор в простейшем случае представляют матрицы с потенциальными выходами и входами.
Изменение сигналов контроля в сочетании с заданной программой приводит к вы5 даче следующих управляющих сигналов с дешифратора 3 на блоки 5 управления, триггеры 11 адреса и блок 15 ритма, включаются в работу блоки управления, имеющие заданную программу, и начинается следующий
0 цикл работы.
Параллельно в определенной последовательности согласно программе через элементы И 6i...6n переключаются триггеры 11i...11n адреса и через элемент ИЛИ 13
5 включают привод 17 манипулятора. Он перемещается до соответствующего датчика 21i...21n, по сигналу которого сбрасывается соответствующий триггер 11, отключается привод 17. Одновременно сигнал сдатчика 211,..21П через элементы ИЛИ 14 и И 7 включает в работу блок 5i управления, который в конце работы возвращает манипулятор в исходное положение, имея через приводы 17 и 34 кинематическую связь с манипулятором: например, привод 17 - движение вперед, а привод 34 - движение манипулятора назад.
В случае задания блоком 4 всех программ в каждом цикле параллельно включаются все блоки 5i.,.5m и один из триггеров 111...11П адреса. Если не заданы программы на спутник или рабочую позицию, по мере движения они не обрабатываются, а управляющие сигналы с дешифратора 3 на соответствующий блок 5 управления или триггер 11 адреса в этом цикле не поступают.
При невключении в работу блоков 5 управления осуществляется перемещение рабочих позиций или спутников без обработки, например, в режиме доработки с ритмом, определяемым элементом 28 задержка в блоке 15 ритма,
Введение в блоки 5 управления датчиков 37 и триггеров 38 упрощает их работу и упрощает дешифратор 3, который выдает на блок 5 управления один управляющий сигнал.
Использование сигнала датчика 24 фиксации рабочих позиций исключает ложные команды в момент смены позиций или спутников до окончания переключения датчиков 25i...25k контроля.
Индикация миганием упрощает и ускоряет определение мест задержек или отказов.
Выключение устройства из работы осуществляется датчиком 22 в конце цикла при наличии команды на останов с пульта 1 управления в блок 2 режима. При этом исчезает управляющий сигнал с блока 2 в дешифратор 3.
Формула изобретения Многоканальное устройство для программного управления, содержащее пульт управления, соединенный выходами с входами блока выбора режима, блок задания программ, выходами соединенный с первой группой входов дешифратора, а также контрольный блок и в каждом канале блок управления, содержащий триггер управления, первый элемент И, первый исполнительный привод и датчик положения, выход каждого блока управления подключен к соответствующему входу группы входов контрольного блока, первый вход блока управления каждого канала, кроме первого, соединен с первой группой выходов дешифратора, управляющий вход которого соединен с выходом блока выбора режима, отличающееся тем, что, с целью расширения области применения устройства, в него введены группа элементов И, группа триггеров адреса, группа датчиков контроля рабочих 5 позиций объекта, датчики контроля положения манипулятора, привод манипулятора, кинематически соединенный с исполнительным приводом первого блока управления, датчик фиксации рабочих позиций,
0 блок ритма, триггер смены позиции, шифратор и счетчик импульсов а также первый, второй, третий и четвертый элементы И, первый и второй элементы ИЛИ, датчик конца перемещения, первые входы элементов
5 И группы подключены к второй группе выходов дешифратора, вторые входы - к второму выходу блока управления первого канала, к первому входу первого элемента И, второй вход которого соединен с выхо0 дом блока управления второго канала, выходы блоков управления остальных каналов соединены с группой входов первого элемента И, а выход - с информационным входом триггера смены позиций, вход сброса
5 которого соединен с выходом датчика конца перемещения, с вторым входом блока выбора режима и первым входом контрольного блока, прямой выход триггера смены позиций подключен к первому входу второ0 го элемента И и исполнительному приводу смены рабочих позиций, а инверсный выход - к первому входу блока ритма, второй вход которого соединен с третьим выходом дешифратора, первый выход блока ритма
5 соединен с четвертым входом первого элемента И, второй выход блока ритма подключен к второму входу контрольного блока, выходы элементов И группы соединены с входами запуска триггеров адреса группы,
0 единичные выходы которых соединены соответственно с входами первого элемента ИЛИ, выход которого соединен с приводом манипулятора, входы сброса триггеров адреса группы соединены с выходами соответ5 ствующих датчиков контроля положения манипулятора и с соответствующими входами второго элемента ИЛИ, выход которого подключен к первому входу третьего элемента И, второй вход которого соединен с
0 четвертым выходом дешифратора, блокирующий вход которого соединен с выходом датчика фиксации рабочей позиции, а вторая группа входов - с выходами шифратора, выход последнего разряда которого соеди5 нен со счетным входом счетчика импульсов, выход переполнения которого соединен с первым входом четвертого элемента И, второй вход которого подключен к второму выходу блока управления последнего канала, а выход - к входу четвертого исполнительного привода, входы датчика конца смены позиций и датчика фиксации рабочей позиции подключены к выходу Привод расфик- сации, а входы датчиков контроля рабочих позиций - к выходу исполнительного привода смены рабочих позиций, а в блок управления каждого канала введены второй элемент И, второй исполнительный привод и два датчика контроля, выход первого датчика контроля подключен к выходу блока управления, выход второго датчика контроля - к первому
входу первого элемента И, второй вход которого соединен с инверсным выходом триггера и первым входом второго элемента И, второй вход которого соединен с первым
входом блока управления канала, а выход - с вторым исполнительным приводом, выход первого элемента И соединен с первым исполнительным приводом, вход датчика положения соединен с S-входом триггера
управления, R-вход которого подключен к второму входу блока управления канала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления формовочной линией | 1987 |
|
SU1564591A1 |
| Устройство для программного управления | 1986 |
|
SU1363136A1 |
| Устройство для программного управления | 1985 |
|
SU1273883A1 |
| Устройство контроля и управления технологическим комплексом для намотки изделий | 1989 |
|
SU1661721A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1154179A1 |
| Система управления гидравлическим прессом | 1983 |
|
SU1108020A1 |
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
| Устройство программного управления шагающим конвейером | 1984 |
|
SU1177237A1 |
| Устройство для программного управления технологическим оборудованием | 1989 |
|
SU1714575A1 |
Изобретение относится к автоматике и может быть использовано при создании автоматизированных систем управления технологическими процессами и агрегатными линиями. Цель изобретения является расширение области применения. Устройство содержит пульт управления , блок режима, блок задания программы, блоки управления с элементами И, исполнительными приводами и датчиками положения, включенными последовательно, контрольный блок и дешифратор, к входам которого подключены блок задания программ и блок режима с пультом управления, а к выходам - блоки управления, соединенные выходами с контрольным блоком, содержащий инверторы, элементы И и ИЛИ, индикаторы. В него введены дополнительные элементы И, ИЛИ, ЗАДЕРЖКА, триггеры адреса и датчики по числу работающих позиций объекта, привод манипулятора, который механически соединен с исполнительным приводом одного блока управления, блок ритма, триггер смены позиций, датчики контроля позиций, шифратор и счетчик. 4 ил.
Фиг.1
От триггера, смены позиций
| Многоканальное устройство для программного управления | 1977 |
|
SU739476A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления распределенным объектом | 1984 |
|
SU1182487A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
