со со
1
Изобретение относится к астропри боростроению и может быть использовно при управлении оптическими телескопами.
Цель изобретения - повьшение бысродействия системы.
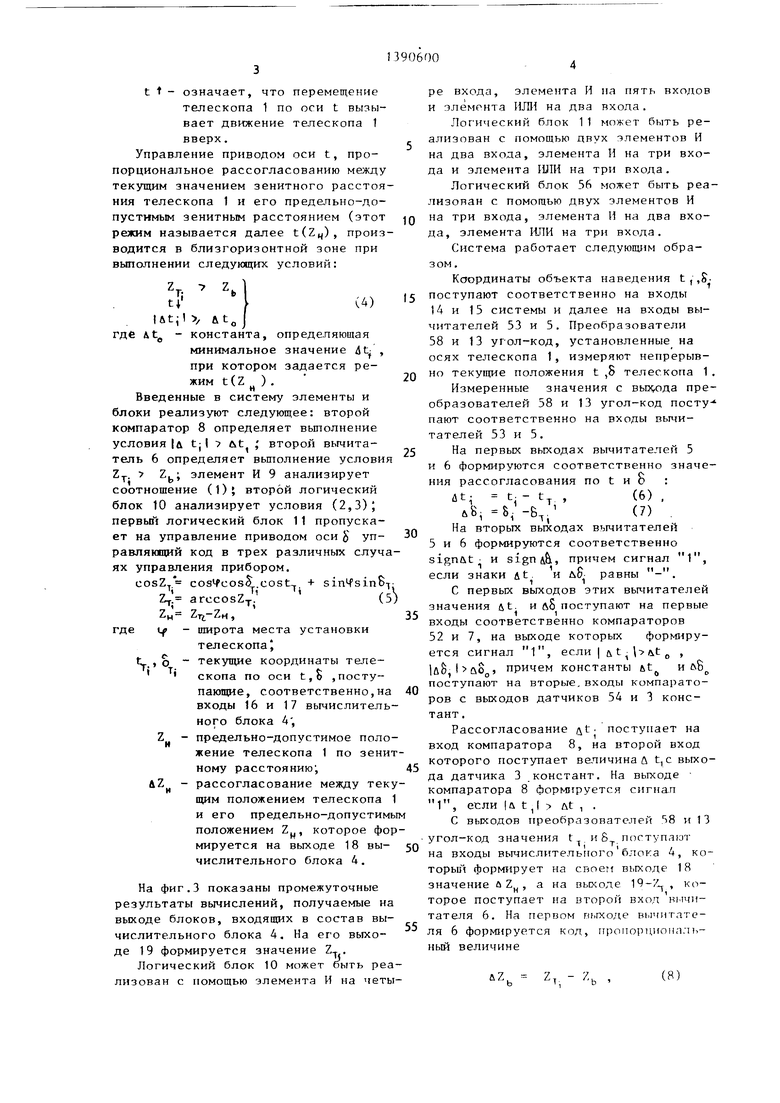
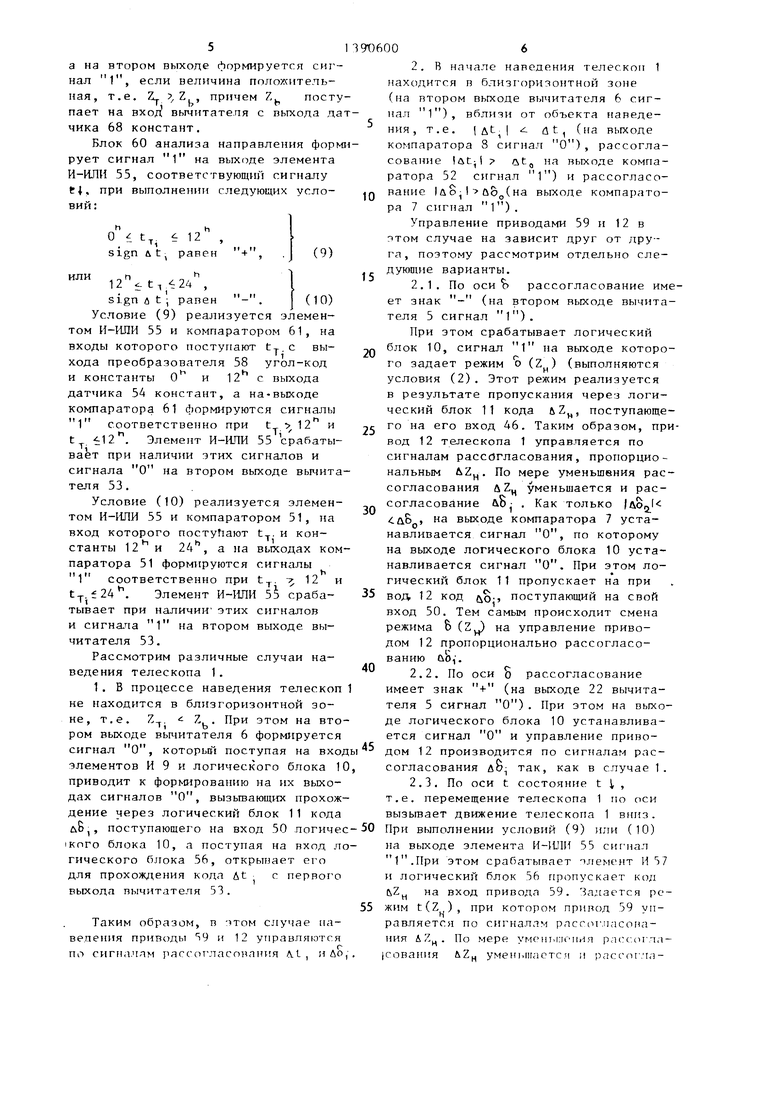
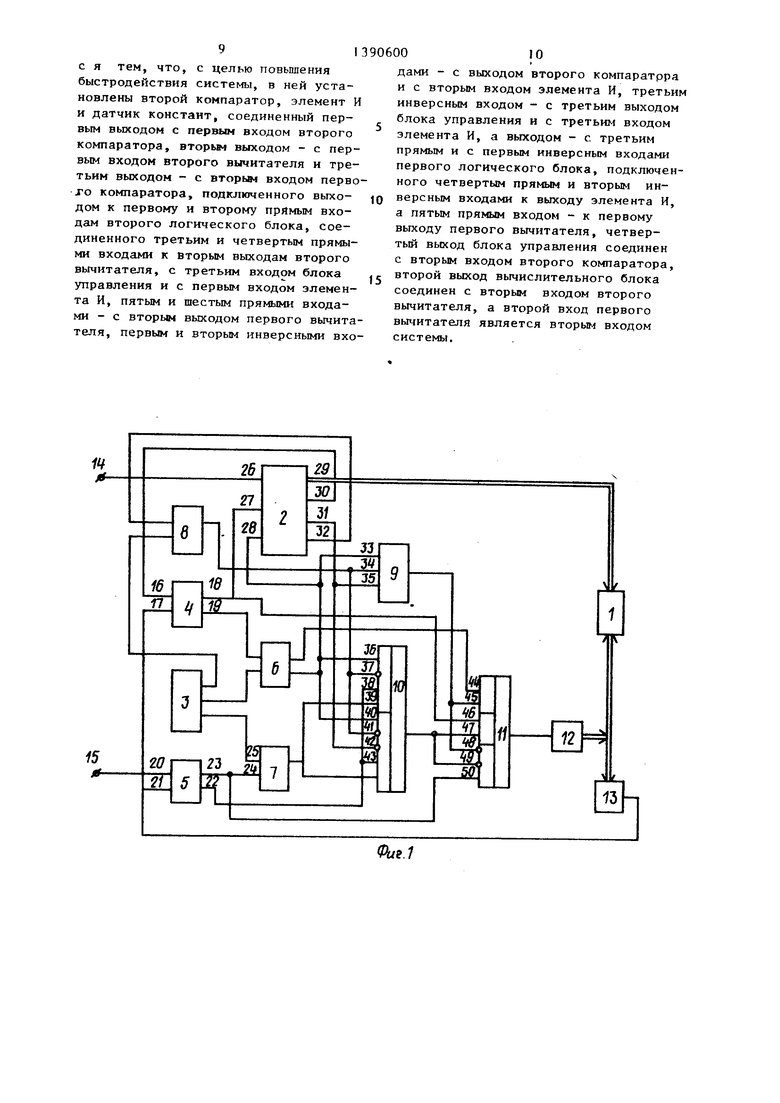
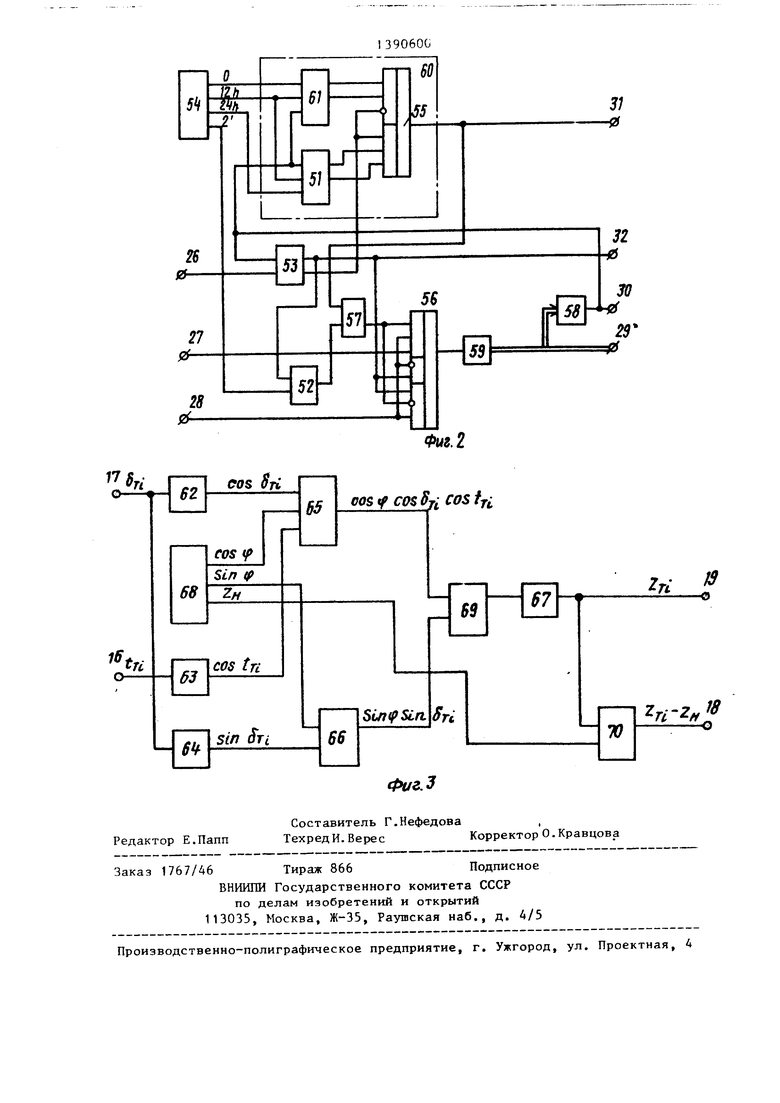
На фиг.1 представлена функционалная сх вма системы на фиг. 2 - функциональная схема блока управления, на фиг.З - функциональная схема вычислительного блока.
Система включает телескоп 1, блок 2 управления, датчик 3 констан вычислительный блок 4, вычитатели 5 и 6, компараторы 7 и 8, элемент И 9, второй 10 и первый 11 логические блоки, привод 12, преобразователь 13 угол-код, первьш 14 и второй 15 входы системы, первьп 16 и второй 17 входы и первьп1 18 и второй 19 выходы вычислительного блока 4, второй 29 и первьй 21 входы и второй 22 и первый 23 выходы первго вычитателя 5, первый 24 и второй 25 входы первого компаратора 7, первый 26 и второй 27 и третий 28 входы, вал 29 и первый 20, второй 31 и третий 32 выходы блока 2 управления, первый 33, второй 34 и третий 35 входы элемента И 9, третий прямой 36, первьш инверсный 37, пятый прямой 38, первый прямой 39, четвертьш прямой 40, второй инверсный 41, третий инверсный 42 и шестой прямой 43 входы второго логического блока 10, второй прямой 44, четвертьш прямой 45, первьй прямой 46, третий прямой 47, второй ин- версньш 48, первьп инверсный 49, пятьп прямой 50 входы первого логического блока 11, компараторы 51 и вычитатель 53, датчик 54 констант, элементы И-ИЛИ 55, логический блок 56, элемент И 57, преобразователь угол-код 58, привод 59, блок 60 анализа направления вращения, компаратор 61, блоки 62 и 63 вычисления косинуса, блок 64 вычисления синуса, блоки 65 и 66 умножения, блок 67 вычисления агссоэ, датчик 68 констант, сумматор 69, вычитатель 70.
Принцип действия системы основан на следующем.
В близгоризонтной зоне в случае большого рассогласования по оси t и движения по этой оси вниз управления приводом оси S производится пропорционально рассогласованию меж
ду положением телескопа 1 по зенитному расстоянию и верхней границей близгоризонтной зоны. Этот режим, называемый 8 (2), обеспечивает удержание телескопа 1 около верхней границы близгоризонтной зоны.
Этот режим задается, если выполняются одновременно следующие условия:
(1)
5 где
0
5
0
5
0
Z. ut.
t, - tl текущее зенитное расстояние телескопа 1
величина верхней границы близгоризонтной зоны; текущее значение рассогласования по оси t , константа;
означает, что перемещение телескопа 1 по оси t вызывает движение телескопа 1 вниз, т.е. в направлении . увеличения Z.
Управление приводом оси S , пропорциональное рассогласовани1Ь между текущим значением зенитного расстояния телескопа и предельно-допустимым зенитным расстоянием телескопа 1, производится в близгоризонтной зоне только при нахождении телескопа 1 по оси t вблизи об ьекта наведения.
Этот режим, называемый далее (Z), задается при выполнении или условии:
Z-T. 7 Z,
Ut/Uut,(2)
signii j равен - /u8.,, или условий
(,, 11
SignA
8;
I Л Oi I 7/ GO ,
равен -
(3)
где ло- - текущее значение рассогласования по оси о , signuo-- знак рассогласования (при нахождении телескопа 1 в близгоризонтной зоне знак - соответствует движению трубы телескопа вниз);
константа, определяющая минимальное значение & t-, при котором задается режим
S(z,,),
л8„ t t - означает, что перемещение телескопа 1 по оси t вызывает движение телескопа 1 вверх.
Управление приводом оси t, пропорциональное рассогласованию между текущим значением зенитного расстояния телескопа 1 и его преде,пьно-до- пустнмым зенитньм расстоянием (этот режим называется далее t(Z) , производится в близгоризонтной зоне при вьтолнении следующих условий:
tVУ(4)
lutjl / &t где At - константа, определяющая
минимальное значение , при котором задается режим t (Z ) .
Введенные в систему элементы и блоки реализуют следующее: второй компаратор 8 определяет вьтолнение условия Iл tj I 7 ut ; второй вычита- тель 6 определяет выполнение условия т- ь элемент И 9 анализирует соотношение (1); второй логический блок 10 анализирует условия (2,3); первьй логический блок 11 пропускает на управление приводом оси управляющий код в трех различных случаях управления прибором.
cosZ. .cost-J, + sin fsinSf 2. arccosZy. (5)
Zm , где tf - широта места установки
телескопаJ
С,о текущие координаты теле- скопа по оси t,S ,поступающие, соответственно,на входы 16 и 17 вычислительного блока А ,
предельно-допустимое положение телескопа 1 по зенитному расстоянию; рассогласование между теку 1ЦИМ положением телескопа 1 и его предельно-допустимы положением Z, которое формируется на выходе 18 вычислительного блока 4.
На фиг.З показаны промежуточные результаты вычислений, получаемые на выходе блоков, входяш11х в состав вычислительного блока 4. На его выходе 19 формируется значение Z.
Логический блок 10 может быть реализован с помощью элемента И на четыZ &Z
0
15
0
5
0
35
45
40
ре входа, элемента И на пять входов и элемента ИЛИ на два входа.
Логический блок 11 может быть реализован с помощью двух элементов И на два входа, элемента Н на три входа и элемента Ш1И на три входа.
Логический блок 56 может быть реализован с помощью двух элементов И на три входа, элемента И на два входа, элемента ИЛИ на три входа.
Система работает следующим образом .
Координаты объекта наведения t,,S. поступают соответственно на входы 14 и 15 системы и далее на входы вы- читателей 53 и 5. Преобразователи 58 и 13 угол-код, установленные на осях телескопа 1, измеряют непрерывно текущие положения t ,8 телескопа 1.
Измеренные значения с преобразователей 58 и 13 угол-код посту- пают соответственно на входы вьгчи- тателей 53 и 5.
На первых выходах вычитателей 5 и 6 формируются соответственно значения рассогласования по t и о :
ut- t. - t , (6) , ЛИ, S;-B,V (7) .
На вторых выходах вычитателей 5 и 6 формируются соответственно signut и signib,, причем сигнал 1, если знаки ut. и дБ равны -.
С первых выходов этих вычитателей значения ut. и &S поступают на первые входы соответственно компараторов 52 и 7, на выходе которых формируется сигнал 1, если | , 1д& , причем константы bt поступают на вторые, входы компараторов с выходов датчиков 54 и 3 констант .
Рассогласование t. поступает на вход компаратора 8, на второй вход которого поступает величина ft t, с выхода датчика 3 констант. На выкоде компаратора 8 формируется сигна.п
Г
если I л t I At
, tl-Jlrl 1 1Д L ) ци ., ,
с выходов преобразователей 58 и 13 угол-код значения t, и8 поступают
с/
на входы вычислительного блока ч, ко- Topbut формирует на cBoett выходе 18
значение и Z , а на вьсходе
19-7 , ко I
торое поступает на второи вход вычи- тателя 6. На первом г«,гходе В1.1чнтате- ля 6 формируется код, гтронорииома. и,- ный величине
ZT, -
(8)
а на втором выходе формируется сигнал 1, если величина полохситель- ная, т.е. Z причем Z поступает на B x.ofi вычитателя с выхола лат- чика 68 констант.
Блок 60 анализа направления формирует сигнал 1 на выходе элемента И-ИЛИ 55, соответствующий сигналу tI, при выполнении следующих условий :
или
Нh
0 t, 12 , sign л t равен
h
V Ст,24
(9)
2. г - Т 1
sign и t равен -. | (10) Условие (9) реализуется элементом И-ИЛИ 55 и компаратором 61, на входы которого поступают t-.c выI 4
хода преобразователя 58 угол-код и константы 0 и 12 с выхода датчика 54 констант, а на-выходе компаратора 61 формируются сигналы 1 соответственно при t 12 и t . Элемент И-ИЛИ 55 срабатывает при наличии этих сигналов и сигнала О на втором выходе вычитателя 53.
Условие (10) реализуется элементом И-ИЛИ 55 и компаратором 51, на вход которого поступают t. и константы 12 и 24, а на выходах компаратора 51 формируются сигналы
и 4 гг
15
Управление приводами 59 и 12 в этом случае на зависит друг от друга, поэтому рассмотрим отдельно сле- дуюп1ие варианты.
2.1. По оси Ь рассогласование име ет знак - (на втором выходе вычитателя 5 сигнал 1).
При этом срабатывает логический блок 10, сигнал 1 на выходе которого задает режим о (Z) (выполняются условия (2) . Этот реи(им реализуется в результате пропускания через логический блок 11 кода AZ, поступающе- 2г го на его вход 46. Таким образом, при вод 12 телескопа 1 управляется по сигналам рассогласования, пропорциональным ... По мере уменьшения рас20
30
Г
12 и
соответственно при t. . ,„ t. 24. Элемент И-ИЛИ 5 срабатывает при наличии этих сигналов и сигнапа 1 на втором выходе вычитателя 53.
Рассмотрим различные случаи наведения телескопа 1.
1. В процессе наведения телескоп 1 не находится в близгоризонтной зоне, т.е. Z. Z. . При этом на вто 1 b
ром выходе вычитателя 6 формируется сигнал О, KoTopbtfi поступая на входы элементов И 9 и логического блока 10, приводит к формированию на их выходах сигналов О, вызьгоающих прохождение через логический блок 11 кода
35
40
45
н согласования
ЛZц уменьшается и рассогласование Ло - . Как только |Ao, йВ чя выходе компаратора 7 устанавливается сигнал О, по которому на выходе логического блока 10 устанавливается сигнал О. При этом логический блок 11 пропускает на при вод 12 код поступающий на свой вход 50. Тем самым происходит смена режима Ь (Z на управление приводом 12 пропорционально рассогласованию йЬ,.
2.2.По оси о рассогласование имеет знак + (на вькоде 22 вычитателя 5 сигнал О) . При этом на выходе логического блока 10 устанавливается сигнал О и управление приводом 12 производится по сигналам рассогласования до так, как в случае 1.
2.3.По оси t состояние t i , т.е. перемещение телескопа 1 по оси вызьгаает движение телескопа 1 вкиз.
лВ,, поступающего на вход 50 логичес-50 При выполнении условий (9) или (10)
на выходе элемента И-ИЛИ 55 сигнал 1.При этом срабатывает элемент И 57
1КПГО блока 10, а поступая на вход логического блока 56, открывает его
-
3906006
2. В начале наведения телескоп 1 находится в близгоризонтной зоне
5
(на втором выходе вычитателя 6 сигнал 1), вблизи от объекта наведения, т.е. I At I -i flt, (на выходе компаратора 8 сигнал О), рассогласование atg на вькоде компаратора 52 сигнал 1) и рассогласование (на выходе компаратора 7 сигнал 1).
Управление приводами 59 и 12 в этом случае на зависит друг от друга, поэтому рассмотрим отдельно сле- дуюп1ие варианты.
2.1. По оси Ь рассогласование имеет знак - (на втором выходе вычитателя 5 сигнал 1).
При этом срабатывает логический блок 10, сигнал 1 на выходе которого задает режим о (Z) (выполняются условия (2) . Этот реи(им реализуется в результате пропускания через логический блок 11 кода AZ, поступающе- г го на его вход 46. Таким образом, привод 12 телескопа 1 управляется по сигналам рассогласования, пропорциональным ... По мере уменьшения рас0
0
5
0
5
н согласования
ЛZц уменьшается и рассогласование Ло - . Как только |Ao, йВ чя выходе компаратора 7 устанавливается сигнал О, по которому на выходе логического блока 10 устанавливается сигнал О. При этом логический блок 11 пропускает на при вод 12 код поступающий на свой вход 50. Тем самым происходит смена режима Ь (Z на управление приводом 12 пропорционально рассогласованию йЬ,.
2.2.По оси о рассогласование имеет знак + (на вькоде 22 вычитателя 5 сигнал О) . При этом на выходе логического блока 10 устанавливается сигнал О и управление приводом 12 производится по сигналам рассогласования до так, как в случае 1.
2.3.По оси t состояние t i , т.е. перемещение телескопа 1 по оси вызьгаает движение телескопа 1 вкиз.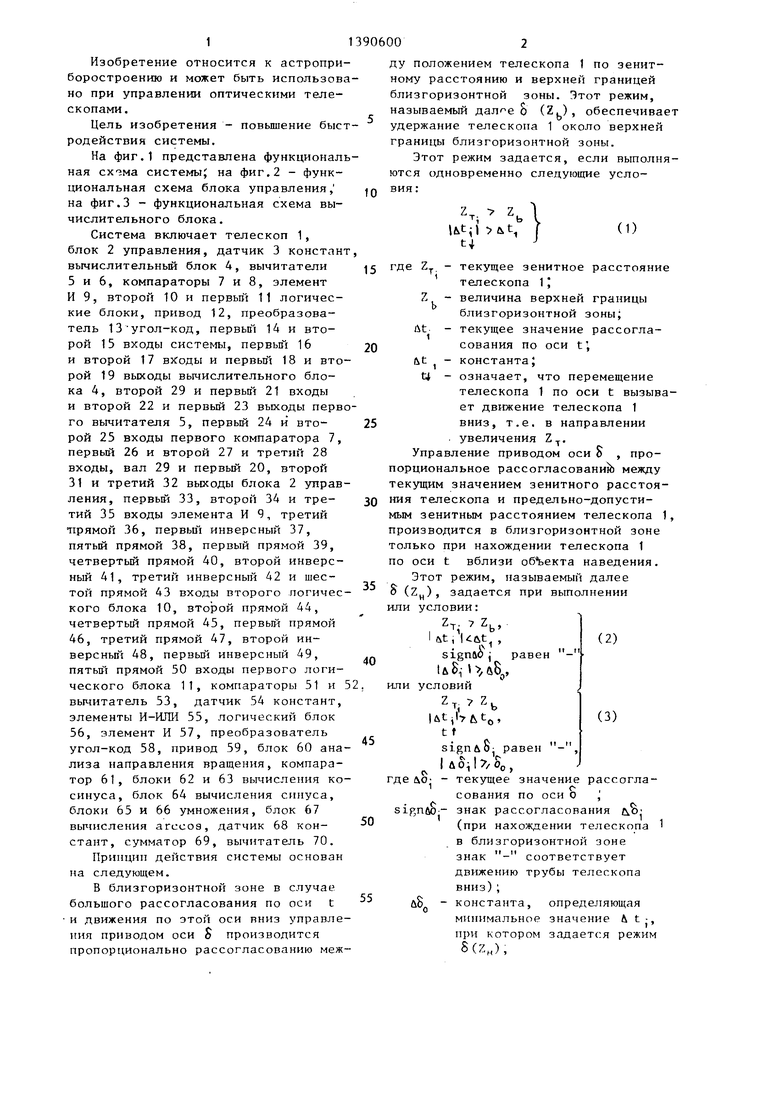
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Телескоп | 1983 |
|
SU1108379A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Фотоэлектрическая следящая система гидирования телескопа | 1984 |
|
SU1228068A1 |
| Система управления телескопом | 1986 |
|
SU1390599A1 |
| Система управления телескопом | 1979 |
|
SU924671A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| Система управления телескопом | 1984 |
|
SU1238026A1 |
Изобретение относится к астро- приборостроению и может найти применение при управлении оптическими телескопами. Целью изобретения является повышение быстродействия системы. Поставленная цель достигается за счет управления телескопом по экваториальной монтировке при нахождении его в близгоризонтной зоне, пропорционально зенитному расстоянию до предельного положения, а управление приводом телескопа по оси склонения ведется таким образом, чтобы обеспечить движение телескопа вблизи верхней границы близгоризонтальной зоны. 3 ил. с 5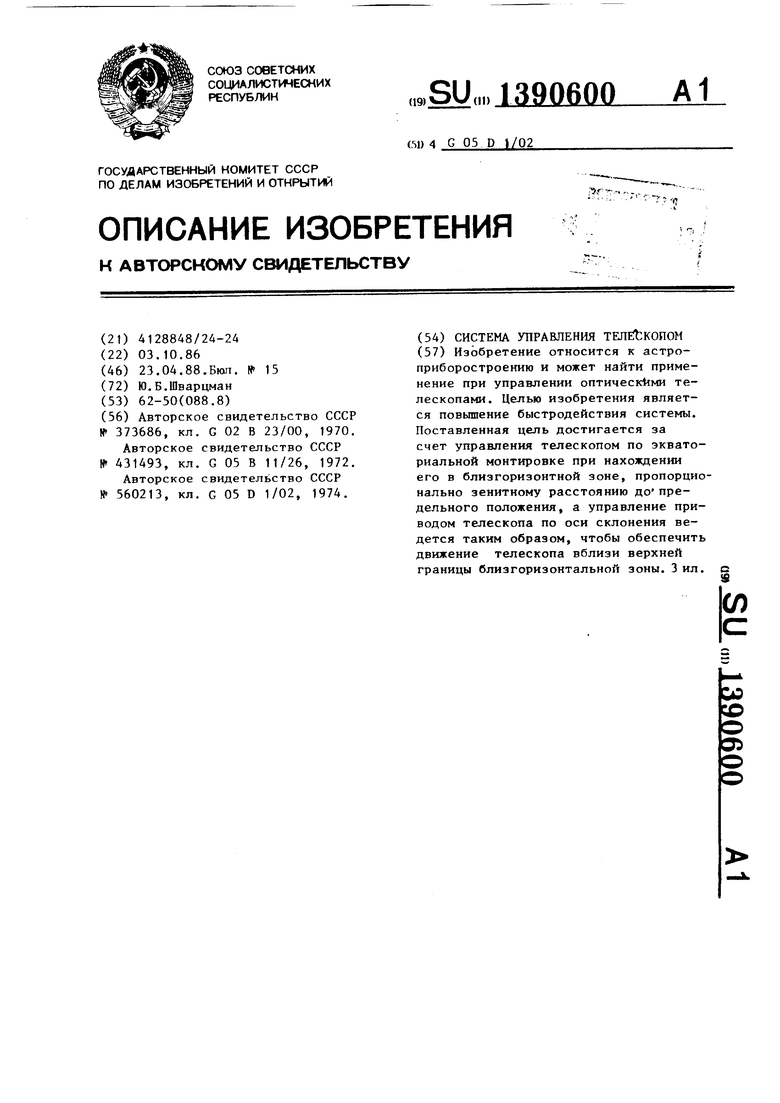
для прохождения кода ut выхода пычитателя 53.
с первого
Таким образом, п этом случае навепения приводы 19 и 12 управляются
г по сигналам рассот ласования М, и До,,
и логический блок 56 пропускает код
bZ.
на вход привода 59. Задается ре55
жим t(Z,). при котором привод 59 упнравляется по сигналам рлссчг.пасонания А Z . По мере yMem.i ifiiHH рпсс ли ла- |сова П1я &Z,. уменьшает с.ч и рассог . тл
7
coBaHHejt-. Кактолько|д1. , на выходе компаратора 52 устанавливается сигнал О. При этом логический блок 56 пропускает на привод 59 код Тем самым произойдет смен режима t(Zj) на управление приводом 59 по сигналам рассогласования 4t,.
2,4, По оси t .состояние t 1 (н выходе элемента И-ИЛИ 55 сигнал О При этом управление приводом 59 производится по сигналам рассогласования так, как в случае 1,
т.е, I utij I 7 д t , (на выходе компарато ра 8 сигнал 1), по оси t состояние tl (на выходе 31 блока 2 управления сигнал 1). При этом срабатывает элемент И 9, открывая логический блок 11 для прохождения на при- вод 12 поступающего на свой вход 44 кодалг. Устанавливается режим D(ZJ), при котором привод 12 управляется по сигналам рассогласования 4Z, . По оси t управление приводом 12 производится в режиме t(Z ) так,как в случае 2.3. Таким образо отработка большого рассогласования bt производится при удержании телескопа 1 за счет привода 12 в положении, близком к верхней границе близ ризонтной зоны. Этим обеспечивается отработка рассогласования 4tj со скростью, близкой к максимальной.
Как только рассогласование ut уменьшается настолько, что |ut j | &t режим 8(2.) сменится на режим &(Z система работает так, как в случае
в случае 1,а по оси S так, как в случае 2.1,
не возможен проезд телескопа 1 чере
это положение при 8. о, из-за низкого положения телескопа 1 по Z.
Эта ситуация возможная только при нахождении телескопа 1 на значитель8
0
5
0 5
0
0
0
5
5
ном расстоянии по оси от объекта наведения, так как при | t( &t, При этом реализуется случай 3 наведения когда телескоп 1 удерживается в положении, близком к Z , за счет автоматического задания соответствующего положения 8-. Скорость обработки рассогласования at- близка к максимальной.
Во всех описанных случаях наведения оно заканчивается при|б.,8 и Ut,. flt .
Предлагаемая система обеспечивает прохождение телескопом 1 со скоростью, близкой к максимальной, перечисленных выше участков, где у известной системы происходит замедление обработки рассогласования ut. В результате в этих случаях время наведения телескопа при применении предлагаемого устройства уменьшается в 2-4 раза. Это позволит приблизительного на 15-30% уменьшить среднее время наведения телескопов, у которых значительное число наведений вьтолняется в близгоризонтную зону (например,наведение на реперы, эталонные источники света и т.п.).
Таким образом, быстродействие предлагаемой системы устройства по сравнению с известной на 15-30% выше, время выполнения наведения в некоторых случаях наведения в 2-4 раза ме ньше.
Формула изобретения
Система управления телескопом, содержащая блок управления, первый вход которого является первым входом системы, второй вход соединен с первым выходом вычислительного блока и с первым входом первого логического J5лoкa, первый выход кинематически связан с первым валом телескопа, а второй выход соединен с первым входом вычислительного блока, подключенного втopы f входом к выходу преобразователя угол-код и к первому входу первого вычитателя, соединенного первым выходом с первым входом первого компаратора, первый выход второго вычитателя соединен с вторым входом второго логического блока, подключенного выходом к входу привода, вал которого кинематически связан с вторым валом телескопа и с валом преобразователя угол-код, отличающая91
с я тем, что, с целью повышения быстродействия системы, в ней установлены второй компаратор, элемент И и датчик констант, соединенный первым выходом с первым входом второго компаратора, вторьм выходом - с первым входом второго вычитателя и третьим выходом - с вторым входом перво го компаратора, подключенного вьпсо- дом к первому и второму прямым входам второго логического блока, соединенного третьим и четвертым прямыми входами к Вторым выходам второго вычитателя, с третьим входом блока управления и с первым входом элемента И, пятым и шестым прямыми входами - с вторым выходом первого вычита теля, первым и вторым инверсными вхо
вычитателя системы.
5
10
дами - с выходом второго компаратрра и с вторым входом элемента И, третьим инверсным входом - с третьим выходом блока управления и с третьим входом элемента И, а выходом - с третьим прямым и с первым инверсньсм входами первого логического блока, подключенного четвертым прямым и вторым инверсным входами к выходу элемента И, а пятым прямым входом - к первому выходу первого вычитателя, четвертый выход блока управления соединен с вторым входом второго компаратора, второй выход вычислительного блока соединен с вторым входом второго вычитателя, а второй вход первого является вторым входом
JiL
62
eos Sri
65
68
Sin If
ZM
tu
COS tn
6ff
sin fn
66
Фиг, 2
cos tf COS 8ji cos /7t
67
2n
13
49
Sin f Sin.
ST.
10
IL
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО и ПОЛУАВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕЛЕСКОПОМ | 0 |
|
SU373686A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР 431493, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
