(54) УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ КРАНОВ1Ц ЖА НАВЫКАМ ПО УПРАВЛЕНИЮ КРАНА

| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер крановщика | 1983 |
|
SU1108484A1 |
| Устройство для обучения крановщика навыкам по управлению краном | 1977 |
|
SU720472A2 |
| Устройство для обучения крановщика навыкам по управлению краном | 1972 |
|
SU474037A1 |
| Тренажер оператора грузоподъемных устройств | 1977 |
|
SU750550A1 |
| Тренажер водителя погрузчика | 1984 |
|
SU1163344A1 |
| Устройство для обучения операторов грузоподъемных машин | 1982 |
|
SU1035635A1 |
| Тренажер крановщика поворотного крана | 1976 |
|
SU610155A1 |
| Тренажер крановщика поворотного крана | 1973 |
|
SU471599A1 |
| Устройство для обучения крановщика | 1980 |
|
SU911590A1 |
| Устройство для обучения крановщика навыкам по управлению краном | 1972 |
|
SU437122A1 |
Изобретение относится к -обучаюшим устройствам и может найти применение,в шстности при подготовке и проверке квашификации крановщиков.
Известно устройство.для обучения навыкам управпения краном, содержащее бпоки управления, моделирования, формирования Отличительных сигнапоВ;, коммутаторов, отображения информации, интегр1фования поворота, сумматоров и преобразователь р..
Опиако это устройство не может имитировать поступательное движение элементов крана относительно реального объекта.
Известно также устройство, содержащее генератор высокой частоты, соединенньхй через фазосдвигающую цепь, блоки сумматоров и коммутаторов с блоками отображения информации, блоки моделирования подъема груза, движения груза по осям координат X и У, модулятор и пупьт управления. Это устройство наиболее близко по технической сущности к предлагаемому 2.
Недостатком данного устройства является отдаленное восприятие имитируемых на
устройстве процессов переноса груза и отсутствие иппюзин поступательного движения обучаемого вместе с краном.
Целью изобретения является повыщение качества обучения путем приближения условий обучения к реальным.
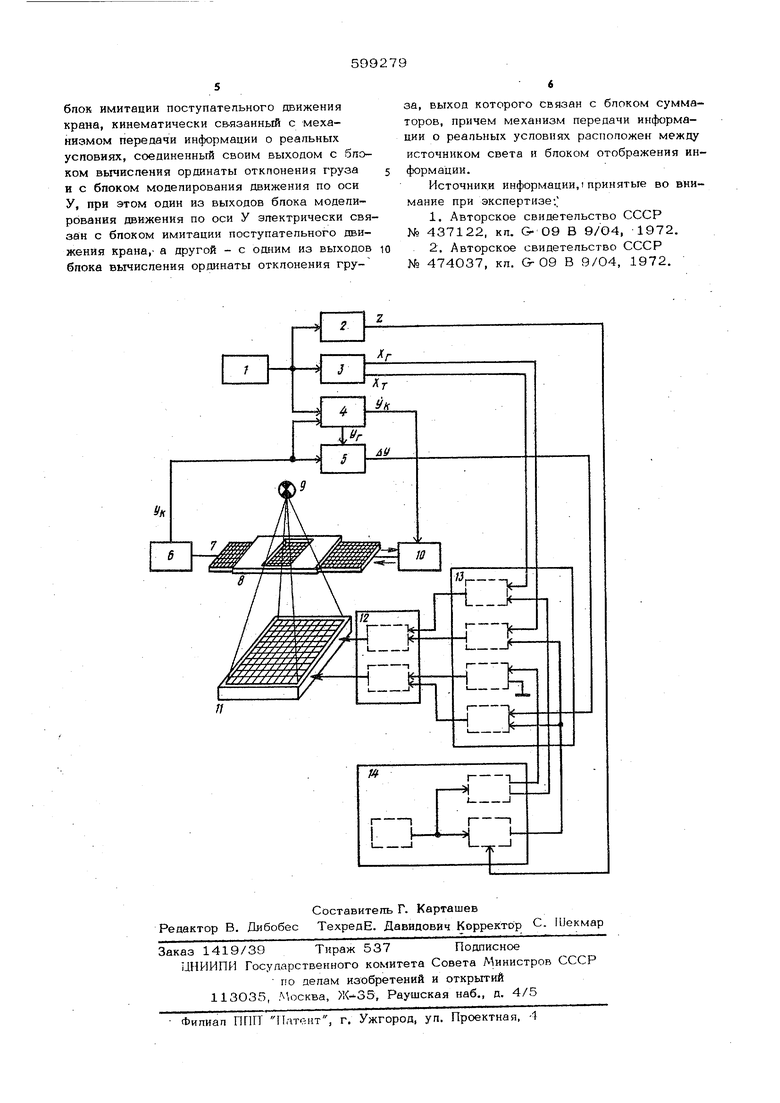
Для этого предлагаемое устройство имеет источник света, механизм передачи информации о реальных условиях, блок имитации поступательного движения крана, кинематически связанный с механизмом передачи информации о реальных условиях и датчик перемещения механизма передачи информации о реальных условиях, соединенный своим выходом с блоком вычисления ординаты отклонения груза и с блоком моделирования движения по оси У. Один из выходов блока моделирования движения по оси У электрически связан с блоком имитации поступательного движения крана, а другой - с ОШ1ИМ из входов блока вычисления ординаты отклонения груза, выход которого связан с блоком сумматоров. Механизм передачи информации о реальных уеповиях расположен между источником света и бпоком отображения информации. На чертеже дана структурная схема описываемого устройства. Блок 1 командоаппаратов соединен с блоком 2 модепирования подъема, блоком 3 модепирования движения по оси X и бпоком 4 модепирования движения по оси У. Вход блока 5 вычисления ординаты отк нения груза соединен с выходом датчика 6 перемещения механизма 7 передачи ин формации о реальных условиях (диапозитива, расположённого в кадрирующей рамке 8 между источником света 9 и блоком 11 отображения информации). Механизм 7 кинематически связан с блоком 10 имита ции поступательного.движения крана, преобразующим электрические сигналы в пост пательное движение механизма передачи и формации. Вход блока 11 соединен через блок 12 коммутаторов, блок 13 сумматор и блок 14 формирования отличительных си наиоБ с выходами блоков 2-5, На чертеж обозначено .й-ввртикапьное перемещение г .. за, Xjr-абсдисса груза, Х-абсцисса тележк скорость движения кране, i -opди га груза, ордината крана, АТ отклоне груза по ординате. Бпок 1О (преобразователь электрическ го сигнала в поступательное движение) пр назначен для осуществления поступательно го движения механизма 7. вдоль кащэирую щей рамки 8 по сигналам поступающим с блока 4 ,а ; представляет собой,например, электрическийТ1ривод с обратной связью по скорости, кинематически соединенный, например, цилинщзическим зубчатым колесом, с рейкой, на которой укреплен .диапо зитив. На диапозитиве, имеющем возможность поступательного движения в кадрирукщей рамке 8, нанесен план цеха, в котором переносится груз. Рамка 8 служит для выделения участка цеха, находящегося в зоне движения груза. Датчик 6 связан с диапозитивом 1 и контролирует его перемещение. Выход датчика 6 связан со входом блока 4 моделирования движения по оси У и первым входом блока 5 вычисления ординаты отклонения груза. Второй вход блока 5. вычисления ординаты отклонения груза соединен с выходом блока 4 моделирования движения по оси У, а выход блока 5 соединен со входом блока 13 су маторов. Устройство работает следующим образ При включенном устройстве на экране блока 11 отображения информации видны $фкая электронная световая точка, исходящая из нее световая наклонная прямад линия, световая окружность. На экран блока 11 проецируется с диапозитива,.например, план цеха, перемещающийся поступательно вдоль экрана в соответствии с перемещением крана при переносе груза. Таким образом, перед обучаемым имитируется сенсорное поле реального крана и его положение в цехе, а также положение точки подвеса каната и груза. Когда обучаемый действует на блок 1 командоаппаратов, то в блоках 2-4 моделирования и блоке 5 начинаются процессы, аналогичные процессам в реальном кране, что вызывает изменение аналогов высоты .2i абсцисс тележки - Xf и груза-Х., а также параметров движения по оси ординат. В результате этого на экране перемещается световая точка, наклонная линия и окружность. Кроме того, блок 10 имитации поступательного движения крана по команде блока 4 моделирования движения по оси У перемещает поступательно диапозитив в кадрирующей рамке 8. На экране блока 11 отображения информации в соответствии с изменением положения крана перемещается план цеха. Это перемещение крана преобразуется в электрический сигнал датчиком б, который используется в блоке 4 моделирования движения по оси X для вычисления ординаты грузаУ. и скорости движения кранаУ и в блоке 5 для вычисления ординаты отклонения груза uY. Полная имитация линамических гфоцессов, возникающих при перемещении груза, позволяет повысить качество обучения и.способствует формированию грамотных навыков при управлении краном. Формула изобретения Устройство для обучения крановщика навыкам по управлению краном, содержащее блок командоаппаратов, соединенный с блоками моделирования подъема и движения по осям координат X, У, блок вычисления ординаты отклонения груза, блок формирования отличительных сигналов, выходы которого электрически связаны посредством блока сумматоров и коммутатора с бпоком отображения информации, а выходы блоков моделирования подъема и движения по оси X подключены соответственно к блоку формирования отличительных сигналов и блоку сумматоров, отличающееся тем, что, с целью повышения качества обучения путем приближения условий обучения к реальным, оно имеет источник света, механизм передачи информации о реальных условиях.
