Изобретение относится к управлению и регулированию и предназначено для использования в моделирующих стендах и может быть использовано также в металлорежущих станках, опорно-поворотных механизмах экскаваторов и роботов манипуляторов.
Целью изобретения является повышение точности системы.
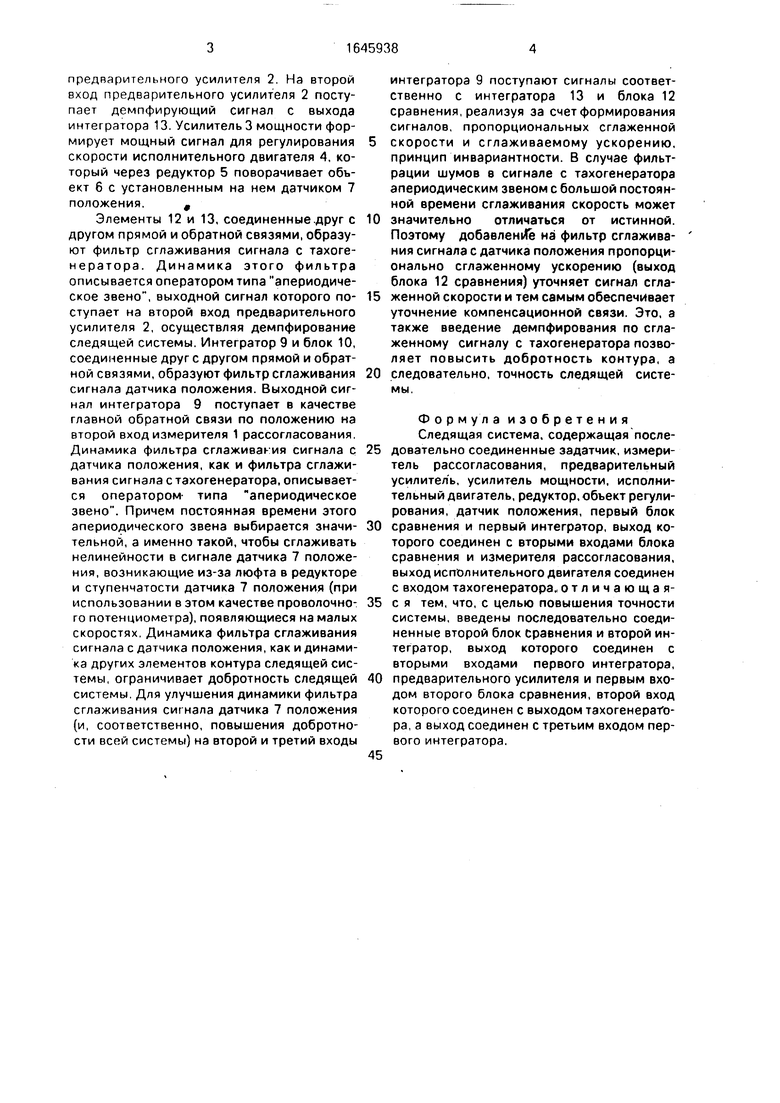
На чертеже изображена функциональная схема следящей системы.
Система включает последовательно соединенные измеритель 1 рассогласования, предварительный усилитель 2, усилитель 3 мощности, исполнительный двигатель 4, редуктор 5, обьект 6 регулирования, датчик 7 положения. Выход исполнительного двигателя 4 механически соединен с тахогене- ратором 8. Второй вход измерителя 1 рассогласования соединен с выходом интегратора 9, первый вход которого соединен с
выходом блока 10 сравнения, первый вход которого соединен с выходом блока 10 сравнения, первый вход которого соединен, с выходом датчика 7 положения, а второй - с выходом интегратора 9. Другой вход измерителя 1 рассогласования подключен в задатчику 11. Кроме того, тахогенератор 8 через последовательно соединенные блок 12 сравнения и интегратор 13 соединен с вторыми входами интегратора 9, блока 12 сравнения и предварительного усилителя 2, а третий вход интегратора 9 подключен к выходу блока 12 сравнения.
Устройство работает следующим образом.
Выходной сигнал задатчика 11 поступает на вход измерителя 1 рассогласования, на другой вход которого поступает выходной сигнал интегратора 9. Измеритель 1 рассогласования вычисляет разность этих сигналов, которая поступает на первый вход
О
ел ю
00 00
предварительного усилителя 2. На второй вход предварительного усилителя 2 поступает демпфирующий сигнал с выхода интегратора 13. Усилитель 3 мощности формирует мощный сигнал для регулирования скорости исполнительного двигателя 4, который через редуктор 5 поворачивает объект 6 с установленным на нем датчиком 7 положения.9
Элементы 12 и 13, соединенные .друг с другом прямой и обратной связями, образуют фильтр сглаживания сигнала с тахоге- нератора. Динамика этого фильтра описывается оператором типа апериодическое звено, выходной сигнал которого поступает на второй вход предварительного усилителя 2, осуществляя демпфирование следящей системы. Интегратор 9 и блок 10, соединенные друг с другом прямой и обратной связями, образуют фильтр сглаживания сигнала датчика положения. Выходной сигнал интегратора 9 поступает в качестве главной обратной связи по положению на второй вход измерителя 1 рассогласования. Динамика фильтра сглаживакия сигнала с датчика положения, как и фильтра сглаживания сигнала с тахогенератора, описывается оператором- типа апериодическое звено. Причем постоянная времени этого апериодического звена выбирается значительной, а именно такой, чтобы сглаживать нелинейности в сигнале датчика 7 положения, возникающие из-за люфта в редукторе и ступенчатости датчика 7 положения (при использовании в этом качестве проволочного потенциометра), появляющиеся на малых скоростях. Динамика фильтра сглаживания сигнала с датчика положения, как и динамика других элементов контура следящей системы, ограничивает добротность следящей системы. Для улучшения динамики фильтра сглаживания сигнала датчика 7 положения (и, соответственно, повышения добротности всей системы) на второй и третий входы
интегратора 9 поступают сигналы соответственно с интегратора 13 и блока 12 сравнения, реализуя за счет формирования сигналов, пропорциональных сглаженной
скорости и сглаживаемому ускорению, принцип инвариантности. В случае фильтрации шумов в сигнале с тахогенератора апериодическим звеном с большой постоянной времени сглаживания скорость может
значительно отличаться от истинной. Поэтому добавлений на фильтр сглаживания сигнала с датчика положения пропорционально сглаженному ускорению (выход блока 12 сравнения) уточняет сигнал сглаженной скорости и тем самым обеспечивает уточнение компенсационной связи. Это, а также введение демпфирования по сглаженному сигналу с тахогенератора позволяет повысить добротность контура, а
следовательно, точность следящей системы.
Формула изобретения Следящая система, содержащая последовательно соединенные задатчик, измеритель рассогласования, предварительный усилитель, усилитель мощности, исполнительный двигатель, редуктор, объект регулирования, датчик положения, первый блок
сравнения и первый интегратор, выход которого соединен с вторыми входами блока сравнения и измерителя рассогласования, выход исполнительного двигателя соединен с входом тахогенератора, отличающаяс я тем, что, с целью повышения точности системы, введены последовательно соединенные второй блок сравнения и второй интегратор, выход которого соединен с вторыми входами первого интегратора,
предварительного усилителя и первым входом второго блока сравнения, второй вход которого соединен с выходом тахогенераГо- ра, а выход соединен с третьим входом первого интегратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1982 |
|
SU1109711A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2067310C1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| Система управления | 1983 |
|
SU1120283A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД С ТОРМОЗНЫМ УСТРОЙСТВОМ | 1992 |
|
RU2066873C1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| Следящая система | 1986 |
|
SU1472871A1 |
Изобретение относится к технике управления и регулирования и может быть использовано в моделирующих стендах, а также в металлорежущих станках, опорно- поворотных механизмах экскаваторов и роботов-манипуляторов. Целью изобретения является повышение точности системы. Система включает измеритель рассогласования, предварительный усилитель, усилитель мощности, исполнительный двигатель, редуктор, объект регулирования, датчик положения, тахогенератор, интеграторы, блоки сравнения, задатчик. Добавление на фильтр сглаживания сигнала с датчика положения пропорционально сглаженному ускорению уточняет сигнал сглаженной скорости и тем самым обеспечивает уточнение компенсационной связи. Это, а также введение демпфирования по сглаженному сигналу с тахогенератора позволяет повысить добротность контура, а значит, точность следящей системы. 1 ил.
| Башарин А.В., Новиков В.А,, Соколовский Г.Г | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982, с.200 | |||
| Следящая система | 1982 |
|
SU1109711A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
