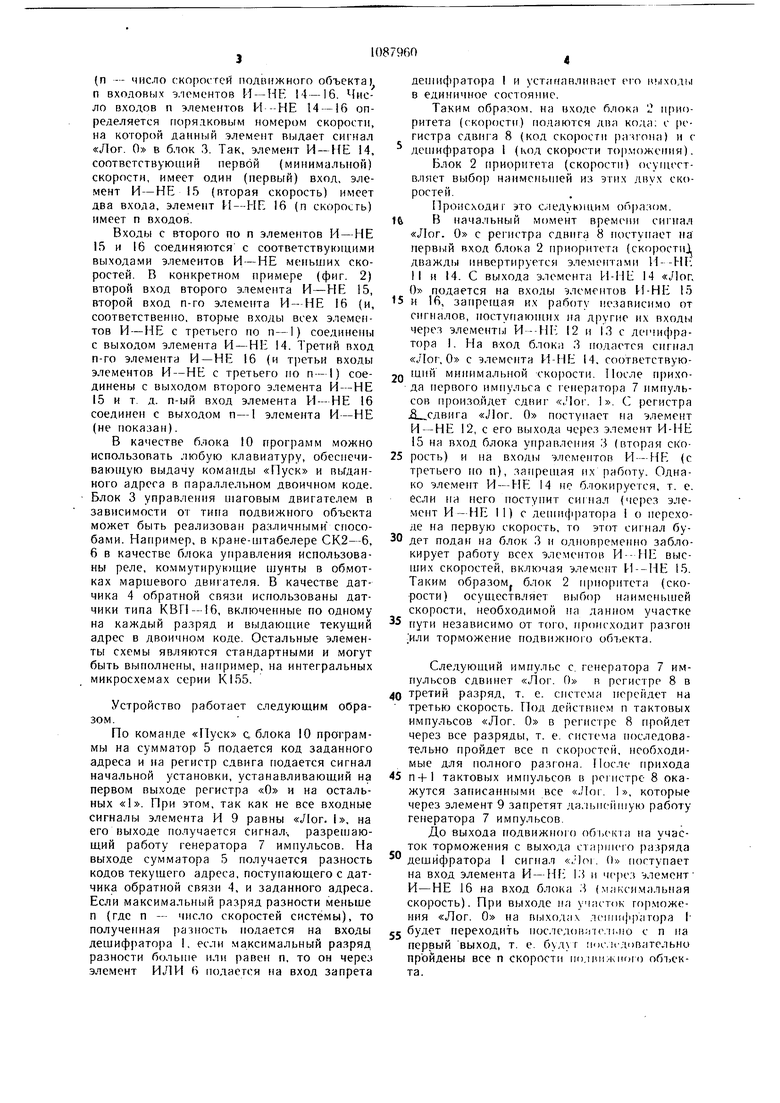
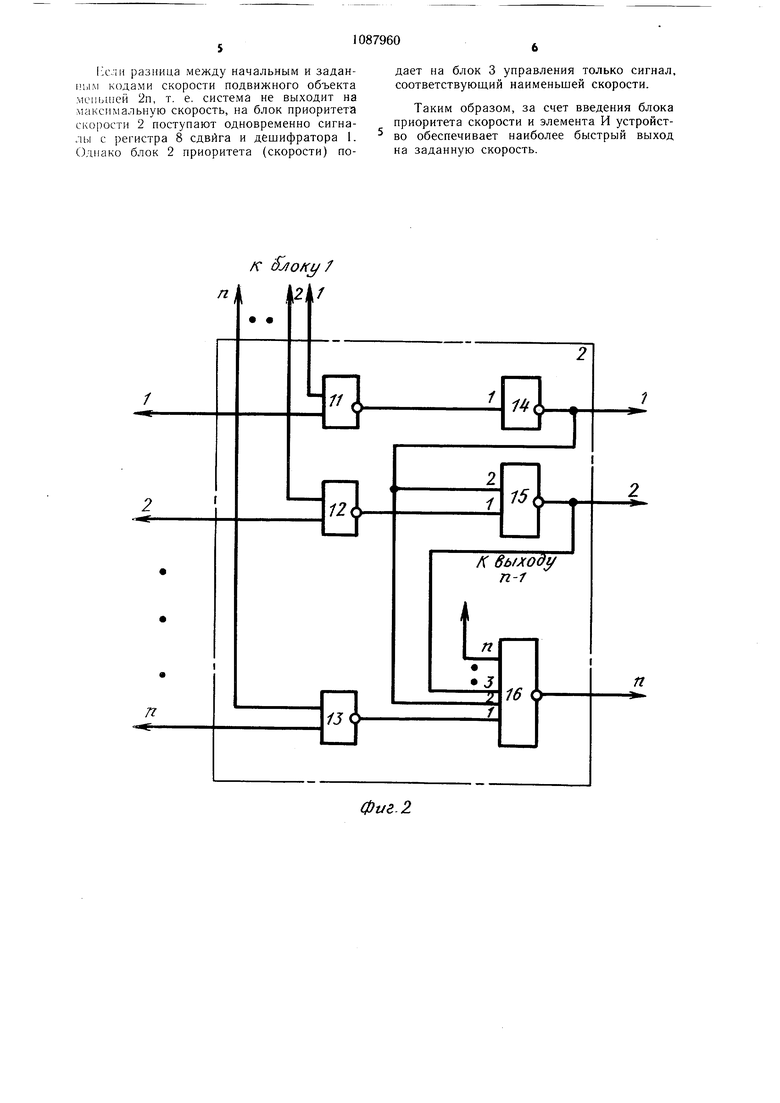
И.1(1бре1сние относится к регулирующим и упруплякпцим системам общего назняче1ГИЯ, в частности к цифровой системе программного управления, и может найти примгисние в автоматических системах управления кранами-штабелерами. подъем-никами и другими подвижными объектами. И: пестна цифровая система программного уг1|1авления, содержащая последовательно включенные преобразователь код-напряжение, усилитель, блок управления, датчик обратной связи и сумматор, второй вход которого соединен с выходом блока задания программ, а выходы CTapnjnx разрядов которого подключены к элементу ИЛИ, логический блок выделения старшего разряда, один вход которого соединен с выходом элемента ИЛИ, другие входы которого соединены с соответствуюшими выходами младших разрядов сумматора, а выходы которого соединены с соответствуюшими входами преобразователя код-напряжение. Система позволяет с высокой точностью производить автоматическое управление подвижным объектом и при приближении к заданному адресу осупхествлять плавное торможение объекта путем снижения подаваемого на блок управления управляющего напряжения (1. Недостатком системы является отсутствие плавного разгона подвижного объекта, что значительно ограничивает область ее применения из-за большого ускорения при разгоне- и возникающих при этом недопустимых перегрузок. Наиболее близким техническим решением к изобретению является цифровая система программного управления, содержащая последовательно соединенные логический блок выделения старшего ра.зряда, преобразователь код--напряжение, усилитель, блок управления, датчик обратной связи и сумматор, выходами младших разрядов непосредственно, а выходами старших разрядов через элемент ИЛИ соединенный с входами логического блока BbuejieHHH старшего разряда, а также регистр начального адреса, входом соединенный с выходом датчика обратной связи, буферный регистр, входами соединенный е выходами сумматора, схему сравнения кодов, входами соединенную с выходами датчика обратной связи и буфернего регистра, коммутатор, первым входом срединенный с выходом регистра начально .го адреса выходом соединенный с вторым входом сумматора, блок задания программ, первым выходом соединенный с сумматором, буферным регистром и коммутатором, вторым выходом соединенный с регистром начальибго адреса,третьим выходом соединенная с коммутатором, входом соединенная с выходом схемы сравнения кодов. Система позволяет осуществить разгон и торможение подвижного обьекта по заранее заданной программе, обеспечиваюпдей движение с допустимыми для подвижного объекта ускорениями (2). Недостатком системы является то, что разгон осуществляется по одной и той же программе, что и торможение, 1гричем смена градации скорости происходит при смене текушего адреса, т. е. не чаше, чем один раз за время движения между соседними адресами (рядами). Поэтому при разгоне Происходит следуюшее явление. После смены ад- реса и увеличении напряжения на выходе цифроаналогового преобразователя подвижный объект начинает разгоняться и достигает нужной скорости. Далее подвижный объект движется с постоянной скоростью до следующей смены адреса (или нескольких адресов), после чего разгон повторяется. Таким об)азом, часть времени разгона уходит на движение с промежуточными скоростями, что снижает быстродействие всей системы. Особенно это заметно при малой разнице в начальном и заданном адресах, ког- . да большую часть пути (или весь путь) подвижного объекта занимают участки разгона и торможения. Целью изобретения ярзляется повышение быстродействия устройства. Поставленная цель достигается тем, что в устройство для программного управления, содержашее блок программы, соединенный ггервым выходом с установочным входом регистра сдвига, а вторым выходом - с первым входом сумматора, подключенного вторым входом к выходу датчика обратной связи, выходами младших разрядов -- соответственно к информационным входам деишфратора, а выходами старших разрядов через элемент ИЛИ - к управляющему входу дешифратора, блок управления, введены блок приоритета, элемепт И и генератор импульсов, подключенный входом к выходу элемента И, а выходом -- к тактовому входу регистра сдвига, соединенного выходами с входами элемента И и с соответствующими первыми входами блока нриори . тета, подключенного вторыми входами к выходам дешифратора, а выходами - к соответствуюп1им входам блока управления. На фиг. 1 приведена блок-схема устj3flEcTBa; на фиг. 2 - принципиальная схема блока приоритета; на фиг. 3 - графики зависимости скорости подвижного объекта от пройденного пути (кривая 1 - для прототипа, крнвая 2 - для предлагаемой системы). Устройство содержит деп1ифратор 1, блок 2 приоритета, блок 3 управления, датчик 4 обратной связи, сумматор 5, элемент ИЛИ 6, генератор 7 импульсов, регистр 8 сдвига, элемент И 9. блок программы 10. % Блок 2 приоритета скорости содержит п двухвходовых элементов И -НЕ И--13
(п - число скорснтей подвижного объекта) п входовы.х элементов И--НЕ 14-16. Число зходов п элементов И -НЕ 14 -16 определяется порядковым номером скорости, на которой данный элемент выдает сигнал «Лог. О в блок 3. Так, элемент И - НЕ 14, соответствующий первой (минимальной) скорости, имеет один (первый) вход, элемент И-НЕ 15 (вторая скорость) имеет два входа, элемент И-НЕ 16 (п скорость) имеет п входов.
Входы с второго по п элементов И-НЕ 15 и 16 соединяются с соответствующими выходами элементов И-НЕ меньших скоростей. В конкретном примере (фиг. 2) второй вход второго элемента И-НЕ 15, второй вход п-го элемента И - НЕ 16 (и, соответственно, вторые входы всех элементов И - НЕ с третьего по п-I) соединены с выходом элемента И - НЕ 14. Третий вход п-го элемента И-НЕ 16 (и третьи входы элементов И-НЕ с третьего но п-I) соединены с выходом второго элемента И-НЕ 15 и т. д. п-ый вход элемента И-НЕ 16 соединен с выходом п-1 элемента И-НЕ (не показан).
В качестве блока 10 программ можно использовать любую клавиатуру, обеснечивающую выдачу команды «Пуск и выданного адреса в параллельном двоичном коде. Блок 3 управления П1аговым двигателем в зависимости от типа подвижного объекта может быть реализован различными способами. Например, в кране-п1табелере СК2-6, 6 в качестве блока управления использованы реле, коммутирующие шунты в обмотках маршевого двигателя. В качестве датчика 4 обратной связи использованы датчики типа КВП -16, включенные по одному на каждый разряд и выдающие текуш.ий адрес в двоичном коде. Остальные элементы схемы являются стандартными и могут быть выполнены, наггример, на интегральных микросхемах серии К155.
Устройство работает следующим ооразом.
По команде «Пуск с, блока 10 программы на сумматор 5 подается код заданного адреса и на регистр сдвига подается сигнал начальной установки, устанавливающий на первом выходе регистра «О и на остальных «1. При этом, так как не все входные сигналы элемента И 9 равны «Лог. I, на его выходе получается сигнал-, разрен аюший работу генератора 7 импульсов. На выходе сумматора 5 получается разность кодов текущего адреса, поступакэщего с датчика обратной связи 4, и заданного адреса. Если максимальный разряд разности меньше п (где п - число скоростей системы), то полученная разность подается на входы дешифратора 1, если максимальный разряд разности больше или равен п, то он через элемент ИЛИ 6 подается на вход запрета
дешифратора 1 и устаг{аиливает его вмходы в единичное состояние.
Таким образом, на входе блока 2 н иоритета (скорости) подаются два кода: с регистра сдвига 8 (код скорости разгона) и с деп)ифратора I (код скорости тор.можепия). Блок 2 приоритета (скорости) осуществляет выбор наименьшей из этих двух скоростей.
ПроисходиI это следующим образом.
В начальный момент времсши сипгал «Лог. О с регистра сдвига 8 поступает на первый вход блока 2 приоритета (cKopocTnJij дважды инвертируется элементами И--HF-. И и 14. С выхода элемента И-НЕ 14 «Лог, О подается на входы элементов П-НЕ 15
и 16, запрещая их работу независимо от сигналов, ноступаюп их на другие их входы
через элемент) ИНЕ 12 и 13 с де 1ифратора 1. На в-ход блоки 3 г одастся сигнал «Лог, О с элемента И-НГ 14, соответствуюЩ 1Й минимальной ско|)ости. После прихода г ерЕюго импульса с тенератора 7 импульсов роизо.йдет «,Чо1. 1. С регистра
Лсдвига «Лог. О поступает на элемент
И--НЕ 12, с его выхода через элемент И-НЕ 15 на вход блока унравле П1Я 3 (вторая с орость) и на входы элементов И-HP (с третьего ю п), заиреп1ая их работу. Однако элемент И - НЕ 14 не б.мокируе ся, т. е. если и него посту ит (через элемент И HFi 11) с ()|рато 1а 1 о iepexojie на первую скорость, то этот сигнал будет подан на блок 3 и oдl oвpeмeн o заблокирует работу всех элеме 1тов П-- НЕ скоростей, включая элемент И--НЕ 15. Таким образом блок 2 риор 1тета (скорости) осуп.ествляет наимень 1 ей скорости, необходимой на данном участке
пути независимо от того, г роисходит разго) .или торможение подвижно -о объекта.
Следующий импульс с. генератора 7 импульсов сдвинет «Лог. 0 н регистре 8 в
третий разряд, т. е. с стема ере 1дет на третью скорость. Под действием п тактовых импульсов «Лог. О в регистре 8 пройдет через все разряды, т. е. с 1стема последовательно пройдет все п скоростей, 1еобходимые для 1олного разгона. После г рихода
n-f I тактовых имг ульсов в рС 1стре 8 окажутся записанными все «Лог. 1, которые через элемент 9 запретят работу генератора 7 импульсов.
До выхода 1годвижпо() объе-к ; участок торможения с вых-ода старшсчч) разряда
дешифратора I «Ло. О г оступает на вход элемента И-Hf: 13 и ч(рез элемент И-НЕ 16 на вход блока 3 (максимальная скорость). При выходе л учгк-ток горможения «Лог. О на В,хода. .noiinnjip.-iropa I
будет переходить 1ослед()и:1-1(.1ю с п а первый выход, т. е. будут пмс.ИДпвательно пройдены все п скорости i(),() объекта.
:л.:;и разница между начальным и заданным кодами скорости подвижного объекта меньшей 2п, т. е. система не выходит на максима.пьную скорость, на блок приоритета скорости 2 поступают одновременно сигналы с регистра 8 сдвига и дешифратора 1. Однако блок 2 приоритета (скорости) подает на блок 3 управления только сигнал, соответствующий наименьшей скорости.
Таким образом, за счет введения блока приоритета скорости и элемента И устройство обеспечивает наиболее быстрый выход на заданную скорость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система программного управления | 1981 |
|
SU962856A2 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 2001 |
|
RU2216760C2 |
| Мультипроцессорная система | 1983 |
|
SU1156088A1 |
| Многопроцессорная вычислительная система | 1985 |
|
SU1277129A1 |
| Преобразователь сдвига фазы в код скорости и ускорения | 1986 |
|
SU1358096A1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1987 |
|
SU1481714A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Устройство для программного управления | 1976 |
|
SU673985A1 |
УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ, содержащее блок программы, соединенный первым выходом с установочным входом регистра сдвига, а вторым выходом - с первым входом сумматора, подключенного вторым входом к выходу датчика обратной связи, выходами младших разрядов - соответственно к информационным входам дешифратора, а выходами старших разрядов через элемент ИЛИ - к управляюш.ему входу дешифратора, блок управления, отличающееся тем, что, с целью повышения быстродействия устройства, в него введены блок приоритета, элемент И и генератор импульсов, подключенный входом к выходу элемента И, а выходом - к тактовому входу регистра сдвига, соединенного выходами с входами элемента И и с соответствующими первыми входами блока приоритета, подключенного вторыми входами к выходам дешифратора, а выходами - к соответствующим входам блока управления. с ж (Л о оо со 05 о
/Г (O/f /
фиг-2
7,66
0,6
о.гА о 7 2 3 5 б 7 F5 70 77 fe 0ueJ }j } // 1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровая система программного управления | 1976 |
|
SU624210A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровая система программного управления | 1981 |
|
SU962856A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
