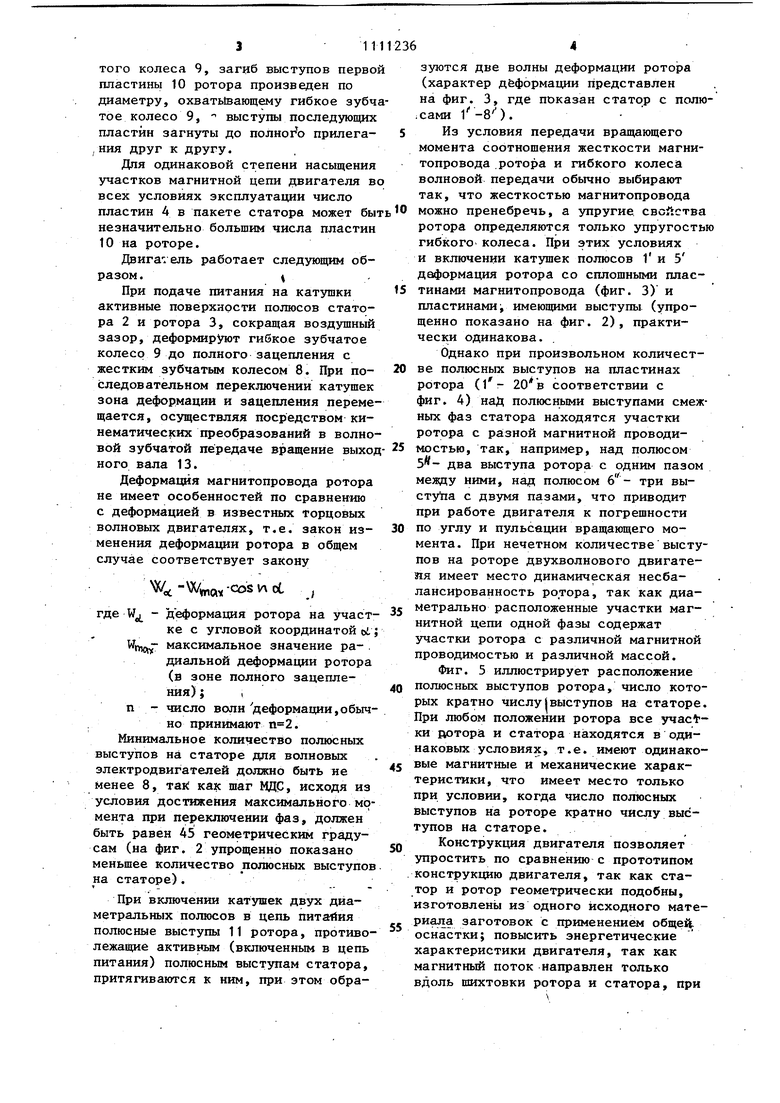
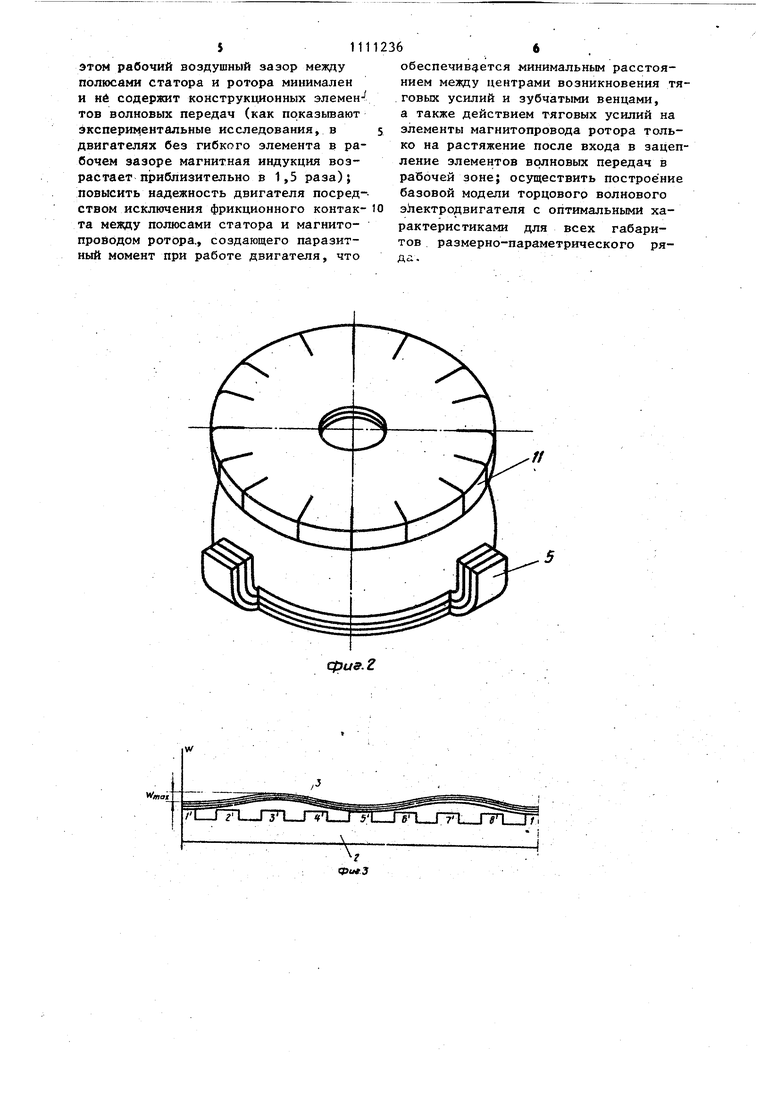
1 Изобретение относится к электротехнике и может быть использовано при проектировании торцовых волновых .электродвигателей. Известен торцовый волновой электpoflBHraTejib, содержащий торцовый ста тор и гибкий шихтованный ротор, пред ставляющий собой набор конусных колец .из электротехнической стали, прикрепленных к упругому плоскому диску и имеющих возможность деформироваться в направлении, перпендикулярном скошенной поверхности магните провод а статора L13 Недостаток известного электродвигателя заключается в изменении параметров (момента и скорости) в течение срока службы из-за наличия фрикционного контакта мелдчу полюсами ста тора и рабочей поверхностью магнитопровода ротора, изготовленных из электротехнической стали: фрикционный контакт приводит к износу и изме нению геометрических размеров контак тирующих поверхностей, а следователь но, к наличию продуктов износа и изменению передаточного отношения в фрикционной паре. Наиболее близким.к предлагаемому является торцовьй волновой электродвигатель, содержащий статор с обмоткой и многослойный гибкий poTopt2 Недостаток известного электродвигателя заключается в низких энергетических характеристиках из-за наличия гибкого зубчатого колеса S расточке статора. Гибкие элементы волновых передач на практике изготазвли :ваются из конструкционных сталей и сштавов, обла.дающих низкими магнитными свойствами. Толщина гибких эле ментов ий условия прочности выбирается соизмеримой с модулем зацепления и приближенно равна рабочему во душному зазору в магнитной системе. Как показывают практические исследования, наличие гибкого элемента волновой передачи в воздушном зазоре снижает нагрузочную способность, и быстродействие двигателей на 2530%. Кроме того, -известной конструк ции присуща технологическая сложность ползгчения пакета вогнутых (по любому закону) дисков, обладающих достаточной эластичностью. Необ ходимая из конструктивных соображений заделка таких дисков в наборе на валу двигателя приводит к тому. 6 . 2 что набор дисков обладает большой жесткостью, причем жесткость набора дисков значительно возрастает при незначительном отклонении по геометрической форме нескольких дисков, вызванном технологическими допусками на изготовление. Цель изобретения - повьш1ение энергетических характеристик торцового волнового электродвигателя. Поставленная цель достигается тем, что в торцовом волновом электродвигателе, содержащем статор с обмоткой и многослойный гибкий ротор, магнитопровод статора .и гибкий ротор выполнены в виде набора кольцевых пластин с полюсными выступами по внешнему диаметру, отогнутыми в сторону рабочего зазора, причем число зыступов на роторе кратно числу выступов на статоре. На фиг. 1 изображена конструкция TopitbBoro волнового двигателя, продольный разрез; на фиг. 2 - элементы магнитной цепи двигателя; на фиг. 3 - деформация ротора со сплошными пластинами магнитопровода; на фиг. 4 - тоже, при произвольном количестве полюсовых выступов на роторе; на фиг. 5 - то же, при числе полюсных выступов на роторе, кратном числу выступов на статоре. Двигатель состоит из корпуса 1, установленного в нем статора 2 и ротора 3. Статор 2 содержит магнитопровод, набранный из пластин 4 с выступами 5, образующими полюса, на которых расположены катушки 6, шайбу 7 с прорезями под полюса, жесткое колесо 8 волновой передачи. Ротор 3 содержит гибкое зубчатое колесо 9, магнитопровод, состоящий из пластин 10 сполюсными выступами 11 по внешнему диаметру, отогнутыми в сторону рабочего зазора, поджимающей пружины 12. Ротор 3 установлен на валу 13 в корпусе 1 и щите 14 с помощью подшипников 15. Для образования торцовых полюсных поверхностей выступы 5 и II пластин 4 и 10 загнуты навстречу друг другу и.образуют рабочий зазор. Для того, чтобы плоскость гибкого зубчатого колеса 9 по всей поверхности сопрягалась с первой пластиной 10 магнитопровода ротора, а первая и последующие пластины .10 не деформировались за пределами гибкого зубчатого колеса 9, загиб выступов перво пластины 10 ротора произведен по диаметру, охватьшающему гибкое зубч тое колесо 9, выступы последующих пластин загнуты до полног о прилега,ния друг к другу. . Для одинаковой степени насыщения участков магнитной цепи двигателя в всех условиях эксплуатации число пластин 4 в пакете статора может бы незначительно большим числа пластин 10 на роторе. Двига1ель работает следующим образом. При подаче питания на катзппки активные поверхности полюсов статора 2 и ротора 3, сокращая воздушный зазор, деформируют гибкое зубчатое колесо 9 до полного зацепления с жестким зубчатым колесом 8. При последовательном переключении катушек зона деформации и зацепления перемещается, осуществляя посредством кинематических преобразований в волновой зубчатой передаче вращение выход ного вала 13. Деформация магнитопровода ротора не имеет особенностей по сравнению с деформацией в известных торцовых волновых двигателях, т.е. закон изменения деформации ротора в общем случае соответствует закону -4nax- s AoC , где W - деформация ротора на участке с угловой координатой oi. югГ максимальное значение радиальной деформации ротора (в зоне полного зацепления) ; , п - число волн деформации,обычно принимают . Минимальное количество полюсных выступов на статоре для волновых электродвигателей должно быть не Менее 8, тай как шаг НДС, исходя из условия достижения максимального момента при переключении фаз, должен быть равен 45 геометрическим градусам (на фиг. 2 упрощенно показано меньшее количество полюсных выступов на статоре). При включении катушек двух диаметральных полюсов в цепь питания полюсные выступы 11 ротора, противолежащие активным (включенным в цепь питания) полюсным выступам статора, притягиваются к ним, при этом образуются две волны деформации poTojpa (характер деформации представлен на фиг. 3, где показан статор с полю.сами I-B). Из условия передачи вращающего момента соотношения жесткости магнитопровода ротора и гибкого колеса волновой передачи обычно выбирают так, что жесткостью магнитопровода можно пренебречь, а упругие свойства ротора определяются только упругостью гибкого колеса. При этих условиях и включении катушек полюсов Г и 5 деформация ротора со сплошными пластинами магнитопровода (фиг. 3) и пластинамиi имеющими выступы (упрощенно показано на фиг. 2), практически одинакова. Однако при произвольном количестве полюсных выступов на пластинах ротора d- соответствии с фиг. 4) над полюсными выступами смежных фаз статора находятся участки ротора с разной магнитной проводимостью, так, например, над полюсом два выступа ротора с одним пазом между ними, над полюсом три выCTytia с двумя пазами, что приводит при работе двигателя к погрешности по углу и пульсации вращающего момента. При нечетном количестве выступов на роторе двухволнового двигатейя имеет место динамическая несбалансированность ротора, так как диаметрально расположенные участки магнитной цепи одной фазы содержат З астки ротора с различной магнитной проводимостью и различной массой. Фиг. 5 иллюстрирует расположение полюсных выступов ротора, число которых кратно числу|выступов на статоре. При любом положении ротора все участки цо тора и статора находятся в одинаковых условиях, т.е. имеют одинаковые магнитные и механические характеристики, что имеет место только при условии, когда число полюсных выступов на роторе кратно числу выступов на статоре. Конструкция двигателя позволяет упростить по сравнению с прототипом конструкцию двигателя, так как статор и ротор геометрически подобны, изготовлены из одного исходного материала заготовок с применением общев оснастки; повысить энергетические характеристики двигателя, так как магнитный поток направлен только вдоль шихтовки ротора и статора, при
$ 111
этом рабочий воздушный зазор между полюсами статора и ротора минимален и н6 содержит конструкционных элементов волновых передач (как прказьгоают экспериментальные исследования, в двигателях без гибкого элемента в рабочем зазоре магнитная индукция возрастает приблизительно в 1,5 раза); повысить надежность двигателя посредством исключения фрикционного контакта меаду полюсами статора и магнитопроводом ротора., создающего паразитный момент при работе двигателя, что
12366 .
обеспечивается минимальным расстоянием между центрами возникновения тяговых усилий и зубчатыми венцами, а также действием тяговых усилий на
5 элементы магнитопровода ротора только на растяжение после входа в зацепление элементов волновых передач в рабочей зоне; осуществить построение базовой модели торцового волнового
10 электродвигателя с оптимальными характеристиками для всех габаритов размерно-параметрического ряда.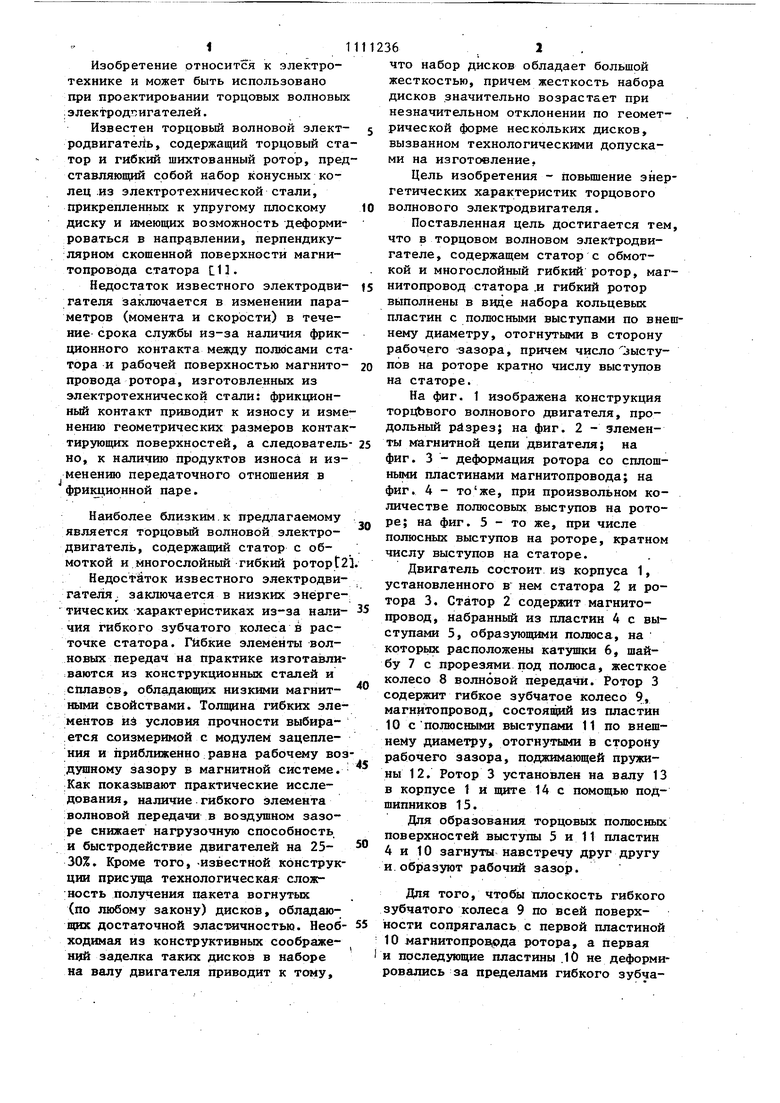
| название | год | авторы | номер документа |
|---|---|---|---|
| Торцовый волновой электродвигатель | 1983 |
|
SU1108579A1 |
| Торцовый волновой электродвигатель | 1980 |
|
SU877732A1 |
| Волновой электродвигатель | 1986 |
|
SU1334304A1 |
| Линейный волновой электродвигатель | 1986 |
|
SU1394352A1 |
| ТОРЦЕВОЙ ВОЛНОВОЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2010 |
|
RU2418351C1 |
| Волновой электродвигатель | 1984 |
|
SU1275683A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2006 |
|
RU2321142C1 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| Волновой электродвигатель | 1976 |
|
SU571858A2 |
| Торцовый волновой электродвигатель | 1978 |
|
SU773851A1 |
ТОРЦОВЬЙ ВОЛНОВОЙ ЭЛЕКТРО. ДВИГАТЕЛЬ, содержащий статор с обмот кой и многослойный гибкий ротор, отличающийся тем что, с целью повьпаения энергетических характеристик, магнитопровод статора и гибкий ротор выполнены в виде набора кольцевых пластин с полюсными выступами по внешнему диаметру, отог нутыми в сторону,рабочего зазора, причем число выступов на роторе крат но числу выступов на статоре. § (Л с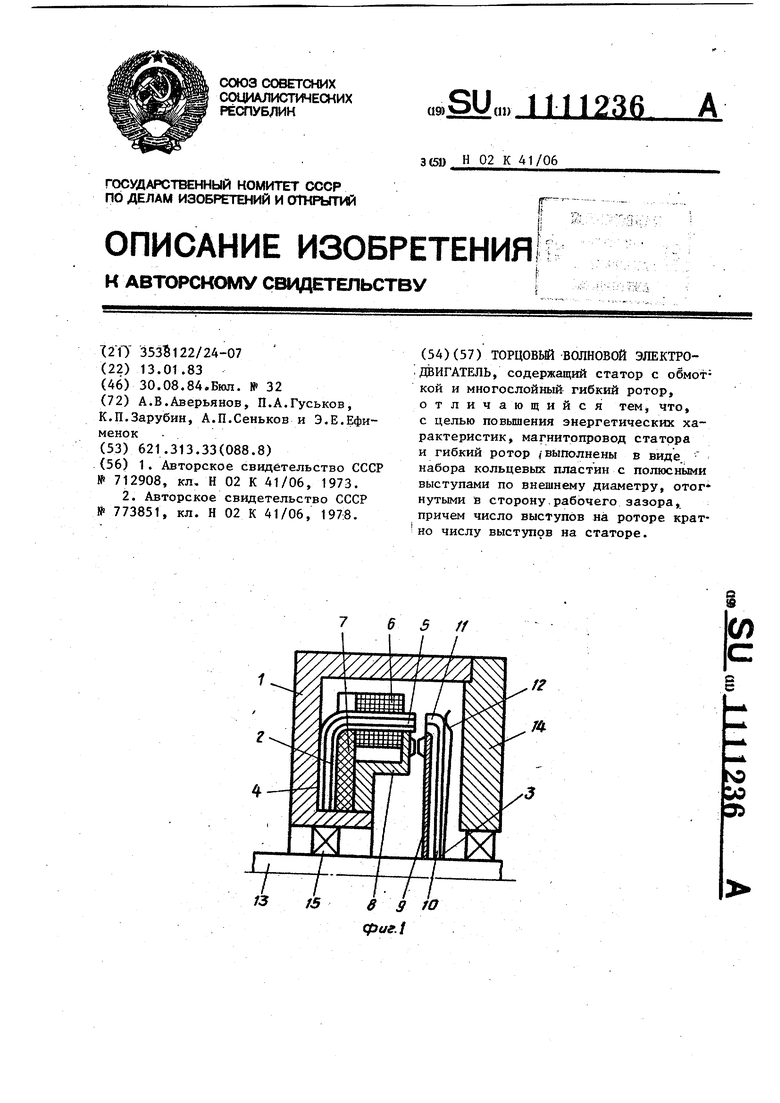
Ж. 4
УГ
i
v: 4г
i
.УГ
ЦТ
фиеЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Торцовый волновой электродвигатель | 1973 |
|
SU712908A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Торцовый волновой электродвигатель | 1978 |
|
SU773851A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ГЬ | |||
