ьо
со
4
ьо Изобретение относится к системам автоматического регулирования объектов с переменным запаздыванием в химической, машиностроительной и других отраслях промышленности. Известна система автоматического регулирования объектами с запаздыванием, . которая содержит последовательно соединенную первую модель объекта, первый блок сравнения, блок подстройки, блок оптимизации, регулятор и сумматор, а также вторую модель объекта, выход которой соединен, со входом второго блока сравнения и четвертьм входом блока оптимизации, первый вход - с выходо сумматора, а второй вход - с выходо блока подстройки, вход первой модели объекта соединен с третьим входом блока подстройки lj , Однако эта система не может быть использована при переменном запаздывании. Кроме того, система отлича ется значительной сложностью из-за наличия элементов подстройки. Наиболее близкой по технической сущности к изобретению является система управления для объектов с запаздыванием, содержащая сумматор и последовательно соединенные измеритель рассогласования, регулятор, исполнительный механизм, выходом под ключенный ко входу объекта, а также последовательно соединенные операционное звено и звено чистого запаздывания, причем вход модели объекта управления (инерционного звена) подключен ко входу объекта управления, а выходы модели объекта управления, звена чистого запаздывания и объекта управления подключены к соответствую щим входам сумматора 2J. Недостатком известной системы явл-яется невысокая точность при переменном запаздывании. . Целью изобретения является .повьше ние точности регулирования в случае переменного запаздывания. Поставленная цель достигается тем что в систему управления для объекто с запаздыванием, содержащую последовательно соединенные сумматор, измеритель рассогласования, регулятор, исполнительный механизм и объект управления, а также последовательно со единенные модель объекта управления без запаздывания и блок чистого запаздывания, причем выход модели объекта управления без запаздывания соединен с первым входом сумматора, а выход - с входом объекта управления, .введен блок деления, первый вход которого соединен с выходом объекта управления, второй вход - с выходом блока чистого запаздывания, а выход делителя связан со вторым входом сумматора. На чертеже представлена схема предлагаемой системы управления. Система содержит измеритель 1 рассогласования, регулятор 2, исполнительный механизм 3, объект 4 управления, имеющий переменное запаздывание, модед1ь 5 объекта без запаздывания, звено 6 чистого запаздывания, блок 7 деления, сумматор-8. Система работает следующим образом. При подаче на вход системы сигнала задания .-в измерителе 1 рас согласования формируется сигнал ошибки, который преобразуется в регуляторе 2 и определяет выходную величину ct исполнительного механизма 3. Сигнал поступает на вход объекта 4 управления, имеющего передаточную функцию вида Wpg (р) , и на вход модели объекта. Передаточная функция звена 5 модели объекта имеет вид Wgg (р), а передаточная функция звена 6 чистого запаздывания . При времени запаздывания объекта t/ ,, не равном времени tg запаздывания звена 6 модели обьекта, (причем с i oj ) ыходной сигнал с блока 7 деления (PV-Wo,(Pve-P р,,.,.;,„ 6b,xtP) с S Q (PV o6 PVe-i зависит только от величины запаздывания. Выходной сигнал системы U itp BbixiPr oi(P)(5(.Хе,,„(РНо.(Р)об(Р) . зависит от величины запаздывания и свойств инерционного объекта. Следовательно, введение в систему блока деления и использование выход-, ных сигналов объекта управления и звеньев модели объекта позволяет обеспечить компенсацию времени переменного запаздывания объекта управления. Точность регулирования системы достигается за счет того, что при изменении динамических свойств объекта выходной сигнал с блока 7 деления вых(р) k. зависит от коэффициента k , учитыва щего изменения параметров в инерционной части объекта 4 управления. В тех случаях, когда время запаздывания объекта С и время чистого запаздьшания Cj модели объекта есть величины постоянные, выходной сиг424нал системы зависит только от свойств модели объекта управления . Использован-ие предлагаемой системы управления позволяет строить простые быстродействующие системы регулирования различными объектами с переменным запаздыванием, изменяющимся в больших пределах.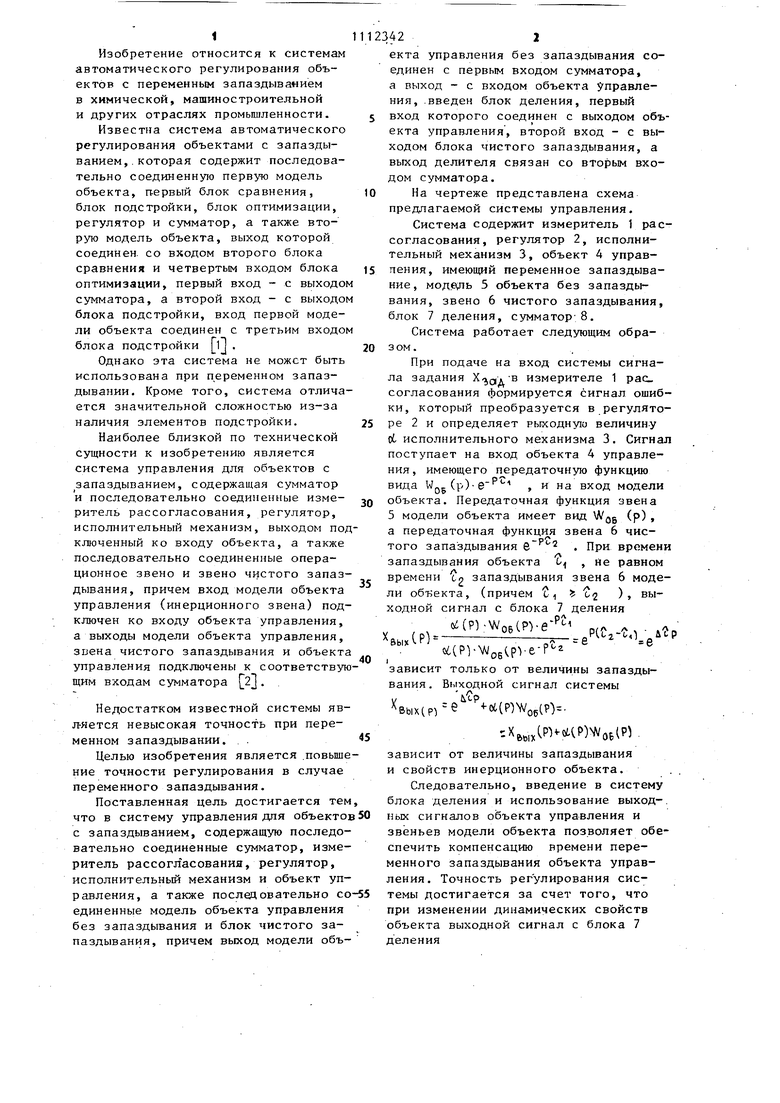
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического регулирования влажности агломерационной шихты | 1981 |
|
SU1032033A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Система управления для объектовС зАпАздыВАНиЕМ | 1979 |
|
SU830295A1 |
| Регулятор | 1989 |
|
SU1789969A1 |
| Адаптивная система управления для объектов с запаздыванием | 1983 |
|
SU1161917A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1980 |
|
SU932460A1 |
| Система управления для объектов с запаздыванием | 1984 |
|
SU1239686A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ, содержащая последовательно соединенные сумматор. измеритель рассогласования, регулятор, исполнительный механизм и объект управления, а также последовательно соединенные модель объекта управления без запаздывания и блок чистого запаздывания, причем выход модели объекта управления без запаздывания соединен с первым входом сумматора, а вход - с входом объекта управления, отличающаяся тем, что, с целью повьпиенпя точности системы, в нее введен блок деления, первый вход которого соединен с выходом объекта управления, второй вход - с выходом блока чистого запаздывания, а выход делителя связан со вторым входом сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское, свидетельство СССР 648947, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Насос | 1917 |
|
SU13A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления для объектовС зАпАздыВАНиЕМ | 1979 |
|
SU830295A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
