I
Изобретение относигся к сисгемам управления нестационарными объектами с за пазоыванием со случайньпли зацающим и возмущающим воэоействиями, в частости к самьвастраивающимся системам с мсще лью объекта, и может быть использовано пля управжшия технологическими tipcneo сами.
Известна адаптивная система пля а томатичвского регулирования обьекпж с переменным коэффициентом усиление св держащая элемент, формирователь сигнала управлеш нелинейный корректирукшвй блок, объект, датчик, выход которого поог КЛЮЧ0 к второму входу сравннвакячего элемента, первый вход блока пеювия соединен с входом задатчика, второй вхоа с выходом сравнивающего элемавта, а с вторым входом формирователя yif равляющего сигнала
Недостатком системы является воавикн 11овение зависимости коэффициента уснле иия. от величины сигнала задние при ва личии запаздывания в объекте.
2
Известна также система для управления объектами с запаздьеанием, реализующая способ автоматич кого регулирования тех нологичёских параметре н содержащая последсязательно соединенные задатчик, сравнивающий элгмент, пе(жый сумматор, регулятор, второй сумматор, исполнительный орган, объект, датчик, измерительный преобразователь, последовательно соединенные дифференцирующийблок, логический воемент, выход которого подключен к вторым входам первого сумматора и второго сумматора, а второй вход - к выходу сравнивающего элемента и входу №фференцирующегоблока, выход измерительного преобразсеателя подключен к второму входу сравнивающего элемента 2..
Недостатком известной системы етса невысокое быстропействие и точность |фв слогчайных изменения сигнала задания и возмущений, действукяцих на объект.
Нанболее блн;а 31М техническим решением является самонастраивающаяся сиотема управления для объектов с за паз д ваннем, соаержашая заааюшее устройство, блсж оптимизации, послеаовательно соеоиненные первый элемент запаздывания и первую мооель объекта, послеасвательно соециненные первый сравнивающий элемент регулятор, сумматор, объект, второй сравнивающий элемент, блок поастрой1ш и BTIVруто модель объекта, первый вход которсЛ соединен с вторым входом первой модели, второй вход с выходом сумматора и
входом первого элемента сравнения, вы ход блока оптимизации подк/почен к второму входу регулятора, второй вход блока подстройки соединен с выходом первого элемента запаздывания, третий вход с выходом пе|жой модели объекта и вторым входом второго сравнивающего элемента 3.
Недостаток устройства - неудовлетв1 рительное бьктродействие вследствие подстройки параметров регулятора по сигналу ошибки регулирования, зависящей от запаздывания объекта.
Цель изобретения - повышение быстродействия системы управлшшя.
Для достижения указанной цели система содержит последовательно соединенные второй элемент запаздывания и третий сравнивающий элемент, второй вход которого подключен к выходу объекта, а выход к входу блока оптимизации, вход второго элемента запаздывания (оединен с выходом задающего устройства и втфым входом первого сравнивающего элемента.
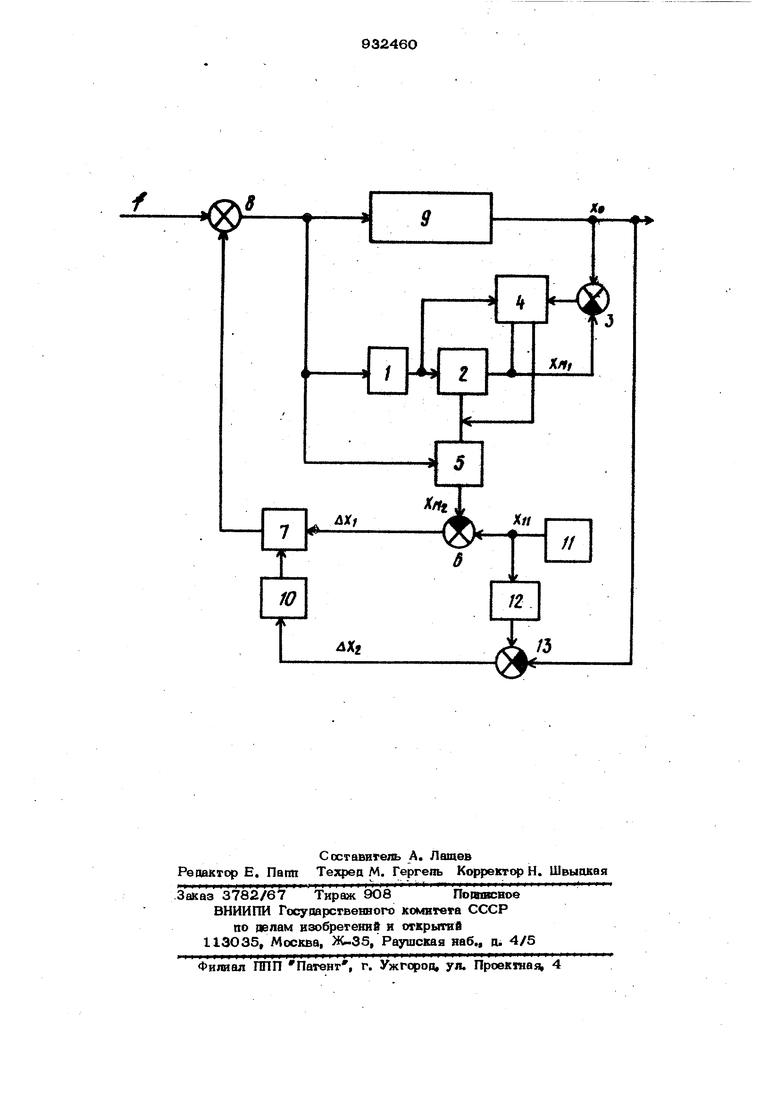
На чертеже изображена блок-схема самс«астраивающейся системы.
Система содержит первый э;юмент 1 запаздывания, первую модель 2 объекта, второй сраы1ивающий элэмент 3, блок 4 подстройки, вторую модель 5 объекта, первый сравнивающий элемент 6, регулятор 7, сумматор 8, объект 9, блок Ю оптимизации, задающее устройство 11, второй элэмент 12 запаздывания, третий сравнивающий элемент 13.
Система работает следующим образом.
При изменении сигнала возмущения f и/или задания Х-% появляется сигнал рассогласования АХ,{ , который отрабатывает регулятор 7. При данном управлении через упреждакацую вторую модель 5 объект 9 находится вне замкнутого контура управления и не влияет на устойчивость замкнутой системы. При отработке uX-f сигнал с выхода второй модели 5-Х 2имеет одинаковое значение с выходным сигналом через время запаздывания.
Еспя пара гетры моделей 2 и 5 не адекватны параметрам объекта 9, вследствие его нестационарности, то в самой
1системе предусматривается их перестройка. Перестройка параметров моделей 2 и 5 проводится через блок 4 подстройки, который согласно определенным алгори мам по сигналам, поступающим с выхооов первого элемента 1 запаздывания, первой модели 2-Х /л и второго сравнивающего элемента 3 производит щенку параметров объекта 9.
Динамика ишрокого класса промьпиленных объектов с запаздыванием достаточно точно описывается операт(фной функцией вида
.e-ptb ,
Wn(P)
tTop
,гд8 - Время чистого запаздывания} KQ, коэффициент усиления и постоJ янная времени объекта;
При этом операторные функции моделей 2 и 5 выбираются в виде
/ (р) - i 1 WM P 14-тД рГ
тогда алгоритм подстройки коаффшхиента К( t) п|ж использовании в блоке 4 подастройки одношаговой релаксацишной процедуры имеет вид
к,(.ь..а-г,,,),
гое X(i, Х (-1), Хд() - выходаые сигналы блоков 1,3,2 соответствш1но;
) - коэффициент К в момент времени, прегоиествукший на время f .
Выхогшые значения блока 4 подстройки перестраивают одновременно как первую 2, так и вторую 5 :модели объекта.
Для повышения быстродействия систем блок 10 оптимизации вырабатывает управляющее воздействие на перестройку параметров регулятора 7 в зависимости от величины ра;шссти АХ выходаой переменной объекта Х, и задания регулятору Х со сдвигом на время запаздывания Т .
При использовании ПИ-заксна регулирования алгоритм работы блока 10 оптимизации параметров регулятора 7 можно использовать, например, в виде
ДМ Ы,,-М;
Kp(t)--Kp(-t-tHC 4N;
Tv,Ct)Kp(i)C,
где N, Ь/ -соответственно .заданное и
действительное число перемен знака сигнала интервале времени 2 Kp(t)Kp()- коэффициент перепаяй perynsr тора соответсгвенно в моменг времени бив мо мент, прешиествуюший на вре мя 1Г j Т Of;) - время изоарома регулятора в текущий момент времевн; 0,0 - коэффициентьц выбираемые для конкретного объекта 9, Алгорвтм работы блока Ю оптимиаации обеспечивает ста лизацию чис1ш перемен знака сигнала Л Х на интервале времени t путем уменьшения К- и Т при &N О, и уведачения Кр и Ту, щт AW О, но 1фи этом отнсшенне Кр и Тц остается постоянным и равным С . TaJDiM образом, преимущества свсте -МЫ проявляются при частых изменениях сипзала заоания Х и возмущающего возйэйствия f , Величина ДХ характеризует пействительную точность отработки регуляторо 7 сигнала зааавия Ха« что обеспечнвает повышение быстродействия системы на 51О% по сраосениюс известными системами. Формуланзобретения Самонастраивающаяся система управления пля объектов с запаздыванием, содержащая задающее устройство, блок orh-. тимнзашга, последсжатепьно соеданенные пе{жый элемент запаздывания и первую модель объекта, последовательно соединенные первый срввннваюишЯ элемент, регулятор, сумматор, объект, второй сравниваюишй элемент, блок поостройкн и вторую моаеш объекта, первый вхоо которой соецниен с вторьа вхопом первой модели объекта, второй вход с выходом сумматора и входом первого элемента запаздывания, а выход с первым вхо|юм первого элемента сравнения, выход блока оптимизации подкяюч&н к второму вхопу | сгулятора, второй вхоп блока поостройки соединен с выходом первого элемента запаздывания, третий вход с выходом первой модели объекта я вторым входом второго сравнивающего элемента, отличающаяся тем, что, с целью повышения быстродействия системы, она содержит последовате|к но соеданенные второй элемент запаздывания и третий сравнивающий элемент, второй вход которого подключен к выходу объекта, а В№ход к вхоцу блока оптимизации, вход второго элемента запаздывания соединен с выходом задающего устройства и входом первого сравнивающего элемента. Исто танки информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР J 572761, кл. G 05 В 13/О2, 1977. 2.Авторское свидетельство СССР N«409192, кл. Q 05 В ll/Ol, 1973. 3.Авторское свидетельство СССР № 648947, кл. Q 05 В 13/02, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1986 |
|
SU1305634A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1990 |
|
SU1714572A1 |
| Система управления для объектов с запаздыванием | 1977 |
|
SU648947A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Система управления для объектов с запаздыванием | 1983 |
|
SU1112342A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Система управления для объектовС зАпАздыВАНиЕМ | 1979 |
|
SU840799A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1109713A1 |