1
Изобретение относится к автоматическому регулированию объектов,имеющих чистое запаздывание, в частности к типичным объектам теплоэнергетики, химической металлургической , горной промышленности..
Известны системы автоматического регулирования объектами, срдержащие последовательно соединенные измеритель рассогласования, регулятор, интегрирующий исполнительный механизм, объект управления, представляющий собой инерционное звено с чистьм запаздыванием, связанный с измерителем рассогласования Г0
Однако система обладает недоста - точным быстродействием.
Наиболее близким по технической сущности к изобретению .является система, содержащая сумматор и последовательно соединенные измеритель, рассогласования, регулятор, исполнительный механизм, выходом
подключенный ко входу .объекта управления 2.
Однако эта система также имеет недостаточное быстродействие и сложная по конструкции.
Цель изобретения - повышение быстродействия и упрощение системы.
Поставленная цель достигается тем, что в систему введены последо.вательно соединенные инерционное, звено и звено чистого запаздывания, причем вход инерционного звена подключен ко входу объекта управления, а выходы инерционного звена, звена чистого запаздывания и объекта управления подключены к соответствующим входам сумматора.
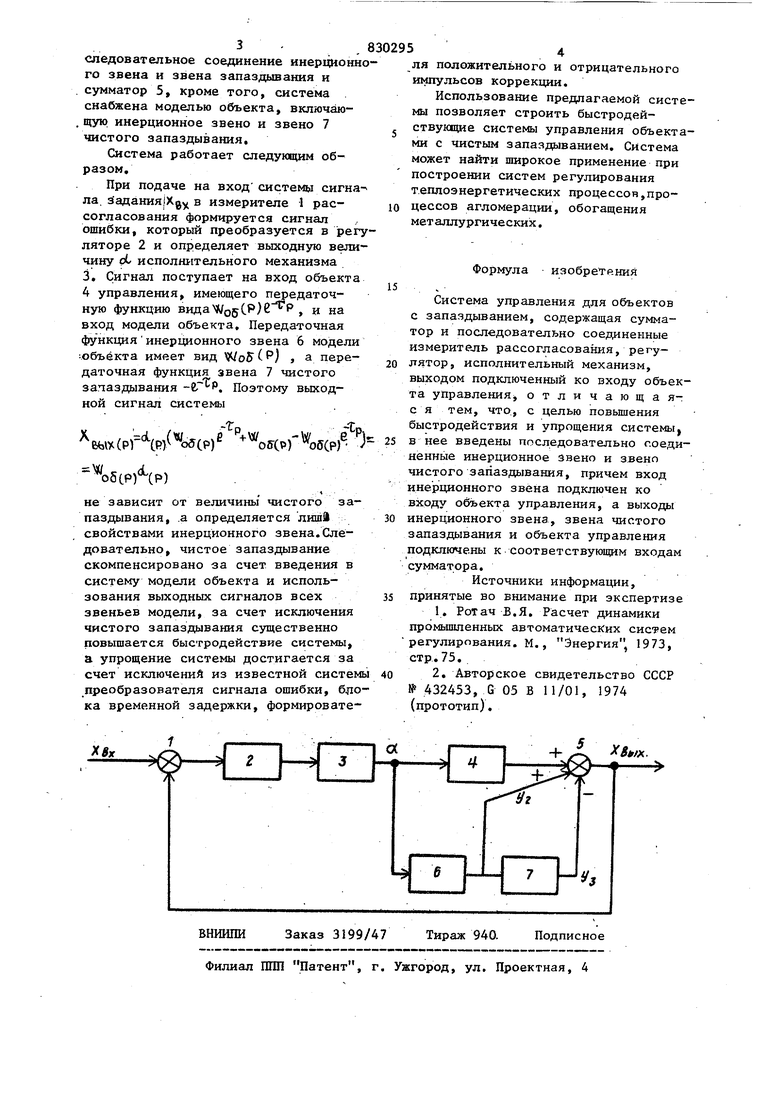
На чертеже представлена схема предлагаемой системы.
Система: содержит измеритель 1 рассогласования, регулятор 2, исполнительный механизм 3, объект 4 управления, представляющий последовательное соединение инерционного звена и звена запаздывания и сумматор 5, кроме того, система снабжена моделью объекта, включаю, ШУЮ инерционное звено и звено 7 чистого запаздывания.
Система работает следующим образом.
При подаче на вход системы сигнала задания Хцу в измерителе 1 рассогласования формируется сигнал ошибки, который преобразуется в регуляторе 2 и определяет выходную величину pi- исполнительного механизма 3. Сигнал поступает на вход объекта 4 управления, имеющего передаточную функцию вида /о5СР) , и на вход модели объекта. Передаточная функцияинерционного звена 6 модели объекта имеет вид Wo5 Р) , а передаточная функция звена 7 чистого запаздывания -eri-P. Поэтому выходной сигнал системы
г,
Чгк.Г
6bW((R)
bffCP) о5СрЛр)
не зависит от величины чистого запаздывания, .а определяется лиши свойствами инерционного звена.Следоватепьно, чистое запаздывание скомпенсировано за счет введения в систему модели объекта и использования выходных сигналов всех звеньев модели, за счет исключения чистого запаздывания существенно повышается быстродействие системы, а упрощение системы достигается за счет исключений из известной системы преобразователя сигнала ошибки, блока временной задержки, формирователя положительного и отрицательного импульсов коррекции.
Использование предлагаемой системы позволяет строить быстродействующие системы управления объектами с чистым запаздыванием. Система может найти широкое применение при построении систем регулирования теплоэнергетических процессов,процессов агломерации, обогащения металлургических,
Формула изобретения
Система управления для объектов с запаздыванием, содержащая сумматор и последовательно соединенные измеритель рассогласования, регулятор, исполнительный механизм,
выходом подключенный ко входу объекта управления отличающаяся тем, что., с целью повышения быстродействия и упрощения системыj
в нее введены последовательно соединенные инерционное звено и звено чистого запаздывания, причем вход инерционного звена подключен ко входу объекта управления, а выходы
инерционного звена, звена чистого запаздывания и объекта управления подключены к соответствующим входам сумматора.
Источники информации,
принятые во внимание при экспертизе
1, Ротач Б,Я, Расчет динамики промышленных автоматических систем регулирования, М., Энергия, 1973, стр,75,
2, Авторское свидетельство СССР № 432453, G 05 В 11/01, 1974 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления для объектов с запаздыванием | 1983 |
|
SU1112342A1 |
| Система автоматического регулирования влажности агломерационной шихты | 1981 |
|
SU1032033A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
| Пропорционально-интегральный регулятор | 1979 |
|
SU798707A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
