СО
00
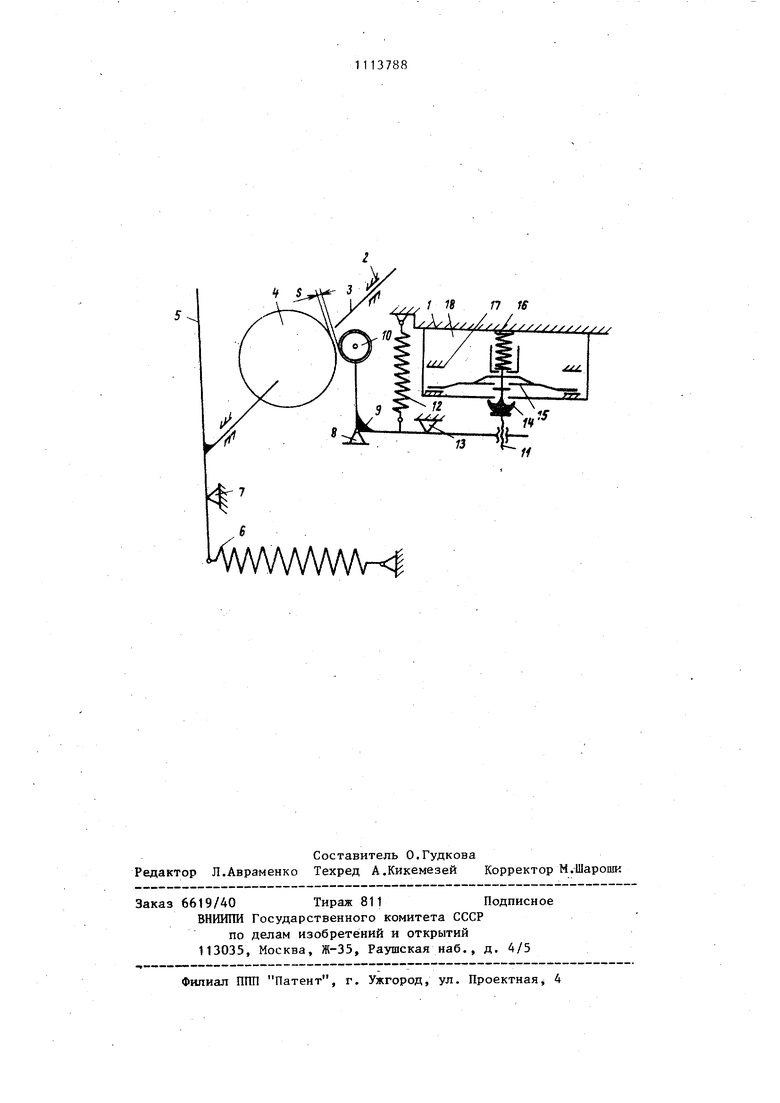
эо Изобретение относится к техническим средствам, используемым для автоматического управления буровыми механизмами, конкретно к приводным устройствам датчиков, используемьк для формирования сигналов о положении рабочих органов механизмов в системе автоматического управления. Известен командоаппарат, преобразующий задающее воздействие рабочего органа в управляющее воздействие на исполнительный механизм. Устройство выйолнено следующим образом. В герметичном корпусе на опорах расположен кулачковый вал, толкатель кулачкового механизма приводного уст ройства выполнен в виде цилиндрического ролика и ползуна, совершающего прямолиненое возвратно-поступательное движение в направляющей. Исполнительный механизм - микропереключатель расположен на стойке. Управляю щее воздействие на исполнительный механизм осуществляется ползуном-тол кателем кулачкового механизма. Точка срабатывания микропереключателя регулируется с помощью винта, которым крепится микропереключатель к стойке путем отделения или приближения микропереключателя к толкателю. Силовое замыкание кулачкового механизма осуществляется механизмом щелчкового действия и пружиной демпфирующего устройства микропереключателя. Ролик толкателя кулачкового механизма контактирует с поверхностью кулачка под действием усилия механизма щелчкового действия микропереключателя til.. Недостатками- конструкции являются ненадежность действия, механический и электрический износ микропереключателя. Наиболее близким к предлагаемому является приводное устройство, содержащее установленный на валу кулачок, двуплечий рьгоаг с роликом на одном из плеч, другое плечо которог подпружинено к корпусу и сопряжено с микровыклгочателем tzl. Недостатком известного устройства является невысокая надежность из-за механического и электрического износ микропереключателя. Цель изобретения - повышение надежности привода. Поставленная цель достигается тем, что в приводном устройстве вал кулачка снабжен рычагом с пружиной возврата, прикрепленной к корпусу, и упором-фиксатором, причем между кулачком и роликом установлен зазор, величина которого определяется по формуле 0.S:JX где S - зазор между кулачком и роликом;Л - ход толкателя микровыключателя;ti - передаточное число двуплечего рычага, равное отношению длин его плеч; X - ход кулачка при повороте связанного с валом рычага, необходимый для срабатывания микропереключателя, На чертеже изображена кинематическая схема устройства (исходное положение, микропереключатель находится в положении прямого срабатывания). Устройство включает корпус 1, внутри которого на опорах 2 установлен вал 3 кулачкового механизма. На валу 3 закреплены кулачок- экcJ eнтpик 4 и рычаг 5, снабженный пружиной возврата 6 и неподвижным упором-фиксатором 7, расположенным снаружи корпуса 1. На опоре В установлен толкатель кулачкового механизма, вьтолненный в виде Г-образного двуплечего рычага 9, на одном плече которого закреплен бочкообразный ролик 10, а на другом регулируемый упор 11. Рычаг 9 снабжен пружиной возврата 12 и неподвижным упором-фиксатором 13, Регулируемый упор 11 связан посредством толкателя 14, щелчкового механизма 15, пружины 16 с контактами 17 микровыключателя 18. Пружины возврата 6 я 12, неподвижные упоры 7 и 13 обеспечивают надежное срабатывание механизма, фиксацию и возврат его в начальное положение, установку ролика 10 и кулачка 4 один относительно другого с зазором 0.S.-AK , где S - зазор между кулачком и роликом;А - ход толкателя микровыключателя ; Ц, - передаточное число двуплечего рычага, равное отношению длин его плеч; У - ход кулачка при повороте ры чага 5, необходимый для сра батывания микропереключателя. В положении, показанном на чертеже, пружина 6 прижимает рычаг 5 к упору 7. Пружина 12 прижимает, рычаг 9к упору 13, при этом ролик не касается кулачка 4, а регулируемый упор 11 воздействует на толкатель 14 щелчковьш механизм 15 и пружину 16, поддерживает состояние контактов 17 микропереключателя 18, при котором размыкающие контакты замкнуты. В этом положении микропереключатель устройства находится в состоянии прямого срабатывания, причем сочетание элементов приводного устройства: вала 3, кулачка 4, рычага 5 пружины 6 и неподвижного упора 7, ры чага 9, ролика 10, регулируемого уп ра 11 , пружины 12 - таково, что кинематическая цепь рычаг 5 - микро переключатель 18 разомкнута, между кулачком-эксцентриком 4 и роликом 10образован зазорS . Зазор S обеспечивает размыкание кинематической цепи приводного устройства и защищает микропереключател от ложного срабатывания под действие случайных нагрузок. Регулируемьй упор 11 позволяет регулировать точку срабатывания микропереключателя 18 без его перемещения при минимальном изменении угла взаимодействия толкателя 14 с регулируемым упором 11, при этом угловое положение упора 11 по отношению к микропереключателю 18 практически не изменяется. Предлагаемое устройство работает следующим образом. При приложении извне механическог заданного усилия, создаваемого движущейся частью механизма буровой ус тановки, рычаг 5 поворачивает вал 3 и кулачок 4, при этом зазор между кулачком 4 и роликом 10 выбирается. Кулачок 4 касается поверхности ролика 10, поворачивает двуплечий рычаг 9 на опоре 8, преодолевая уснпие пружины 12, отводит регулируемый упор 11 от упора 13 и образует зазор между упором 11 и толкателем 14, т.е. освобождает толкатель 14 микропереключателя 18. Освобожденный толкатель 14 под действием щелчкового механизма 15 и пружины 16 переходит в положение обратного срабатывания, при этом изменяется состояние контактов 17 (размыкающие контакты разомкнуты, замыкающие замкнуты), переключение контактов 17 и перемещение толкателя 14 происходит без преодоления усилия от упора 11. Зазор S между регулируемым упором 11 и .толкателем 14 обеспечивает размыкание кинематической цепи приводного устройства в положении обратного срабатывания, что защищает в этом положении микропереключатель от ложного срабатывания. При таком положении микропереключатель 18 формирует сигнал в систему автоматического управления о положении рабочего .органа бурового механизма. После снятия внешнего усилия приводное устройство возвращается в положение прямого срабатывания под действием возвратных 6 и 12, кинематическая цепь приводного устройства размыкается с образованием зазора .S между кулачком 4 и роликом 10. Такое конструктивное решение приводного устройства позволило исполь- зовать преимущества применения малогабаритного микропереключателя с короткоходовым толкателем, обеспечивающим высокую точность срабатывания при увеличении его надежности действия и долговечности. Установка кулачка 4 и ролика 10 с зазором в положении прямого срабатывания обеспечивает размыкание кинематической цепи приводного устройства с целью защиты в этом положении микропереключателя от ложного срабатывания.
} 18 п re
1 УДХХ У/ХХ/Х .... ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сортировки деталей | 1990 |
|
SU1789311A1 |
| Устройство для изготовления и расклепки штырей в платах | 1983 |
|
SU1152691A1 |
| Кромкогибочная установка | 1990 |
|
SU1784339A1 |
| Установка для накопления кирпичей с зазором | 1986 |
|
SU1402432A2 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| УСТРОЙСТВО ТРАФАРЕТНОЙ ПЕЧАТИ НА ТКАНИ | 1991 |
|
RU2032483C1 |
| Устройство для шлифования деталей из древесины | 1983 |
|
SU1094725A1 |
| Автомат для изготовления пружинных колец | 1982 |
|
SU1063517A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПОРНО-РЕГУЛИРУЮЩИМ ОРГАНОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ И СПОСОБ НАСТРОЙКИ ЕГО ОГРАНИЧИТЕЛЯ МАКСИМАЛЬНОГО КРУТЯЩЕГО МОМЕНТА | 2005 |
|
RU2273784C1 |
| Намоточная головка | 1984 |
|
SU1277229A1 |
ПРИВОДНОЕ УСТРОЙСТВО, содержащее установленный на валу кулачок, двуплечий рычаг с роликом на одном из плеч, другое плечо которого подпружинено к корпусу и сопряжено с микровыключателем, отличающееся тем, что, с целью повыше НИЛ надежности привода, вал кулачка снабжен рычагом с пружиной возврата, прикрепленной к корпусу, и упором-фиксатором, причем между кулачком и роликом установлен зазор, величина которого определяется по формуле Х-АК , где S - зазор между кулачком и роликом; А - ход толкателя микровыключателя ; К - передаточное число двуплечего рычага, равное отношению длин его плеч; X - ход кулачка при повороте связанного с валом рычага, необходимый для срабатывания микропереключателя.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Информэлектро, М., 1975 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кучер И.М | |||
| Металлорежущие стан ки | |||
| Д., Машиностроение, 1970, с | |||
| Способ приготовления пластического взрывчатого состава | 1913 |
|
SU439A1 |
| Говорящий кинематограф | 1920 |
|
SU111A1 |
