(54) МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1978 |
|
SU722757A1 |
| Модуль промышленного робота | 1986 |
|
SU1341016A1 |
| Модуль промышленного робота | 1979 |
|
SU831606A1 |
| Модуль промышленного робота | 1980 |
|
SU891426A1 |
| Промышленный робот | 1981 |
|
SU1057267A1 |
| Модуль промышленного робота | 1980 |
|
SU880711A2 |
| Модуль промышленного робота | 1986 |
|
SU1421524A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот с дискретным позиционированием | 1980 |
|
SU887155A1 |
| Устройство для перемещения исполнительного органа манипулятора | 1985 |
|
SU1283084A1 |
1
Изобретение относится к машиностроению, в частности к манипуляторам с программным управлением промышленным роботом.
Известны модули промышленных роботов содержащие привод линейного перемещештя, состоящий из последовательно соединенных. силовых цилиндров. Однако известные модули промышленных роботов не обладают достаточной точностью позиционирования при необходимом быстродействии устройства.
Цель изобретения - повышение точности позиционирования. Это достигается за счет того, что модуль промышленного робота снабжен дополнительным приводом линейного перемещения, смонтированным на одном из силовых цилиндров и выполненным в виде винтовой передачи, гайка которой установлена в направляющей, закрепленной на этом цшшнщ)е.
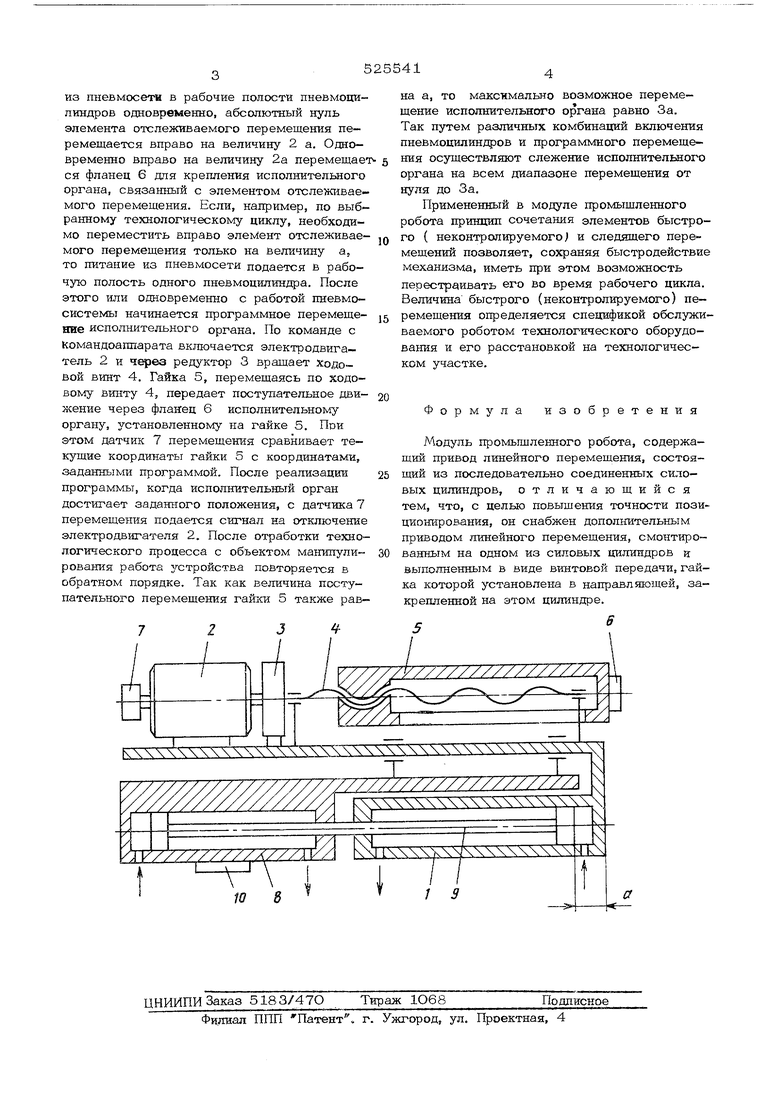
На чертеже дана схема модуля промыщленного робота.
Модуль промышленного робота состоит из каретки 1, являющейся одним из двух пневмоцилиндров, на которой установлен
электродвигатель 2. свйзаш ый через редуктор 3 с ходовые-: з1гато- ; -, тссие гайки 5, установленной на ходовол-; винте 4, имеется фланец 6 для креплешш псполнительного органа или прсдиэжзточпсго звена робота. На выходке:.: кспце электродвт1гателя 2 установлен датчггс 7 перемещения. Эта часть является глемеитом отслеживаемого перемещения. Каретка 1 установлена на направляющие стангшы 8, являющейся другим пневмоцилиндром. Оба пкевмоцилиндра обье,1иненыпоршнем 9. На корпусе станины 8 имеется фланец 1О для креп-ления всего устройства к любому другому звену робота.
Модуль промышленного робот-а работает следующим образом. После включения системы управления питание т:з ппевмосети поступает в рабочие полости пн:8Вмоцилиндров каретки 1 и станины 8. В зав-исимосттт от технологического цикла гЕитакие из пневмо- сети поступает в рабочие полости обоих пневмоцилиндров одновремекчо, так как величина хода поршня 9 отйосительно пневмоцилиндров равна а, то прк подаче иктаггля из пневмосетн в рабочие полости пневмоципиндров одновременно, абсолютный нуль элемента отслеживаемого перемещения перемещается вправо на величину 2 а. Одновременно вправо на величину 2а перемещае ся фланец 6 для крепления исполнительного органа, связанный с элементом отслеживаемого перемещения. Если, например, по выбранному технологическому циклу, необходимо переместить вправо элемент отслеживае мого перемещения только на величину а, то питание из пневмосети подается в рабочую полость одного пневмоцилиндра. После этого или одновременно с работой пневмосистемы начинается программное перемещение исполнительного органа. По команде с «сомандоаппарата включается электродвигатель 2 и через редуктор 3 вращает Ходовой винт 4. Гайка 5, перемещаясь по ходовому винту 4, передает поступательное движение через фланец 6 исполнительному органу, установленному на гайке 5. Пои этом датчик 7 перемещения сравнивает текущие координаты гайки 5 с координатами, заданными программой. После реализации программы, когда исполнительный орган достигает заданного положения, с датчика 7 перемещения подается сигнал на отключение электродвигателя 2. После отработки технологического процесса с объектом машшулирования работа з/стройства повторяется в обратном порядке. Так как величина поступательного перемещения гаЙ1Ш 5 также равна а, то максимально возможное перемещение исполнительного органа равно За. Так путем различных комбинаций включения пневмоцилин/фов и программного перемещения осуществляют слежение исполнительного органа на всем диапазоне перемещения от нуля до За. Примененный в модуле промыщленного робота принцип сочетания элементов быстрого { неконтролируемого и следящего перемещений позволяет, сохраняя быстродействие механизма, иметь при этом возможность перестраивать его во время рабочего цикла. Величина быстрого (неконтролируемого) перемещения определяется спецификой обслуживаемого роботом технологического оборудования и его расстановкой на технологическом участке. Формула изобретения Модуль промыщленного робота, содержащий привод линейного перемещения, состоящий из последовательно соединенных силовых цилиндров, отличающийся тем, что, с целью повыщения точности позиционирования, он снабжен дополнительным приводом линейного перемещения, смонтированным на одном из силовых 1шлиндров и выполненным в виде винтовой передачи, гайка которой установлена в направляющей, закрепленной на этом цилиндре. сS
