Изобретение относится к промышленному транспорту, в частности к автоматизации управления кранами-штабелерами и может быть использовано для автоматизации погрузочно-разгрузочных, транспортных и складских работ в различных отраслях народного хозяйства, в том числе, в сельском хозяйстве.
По основному авт. св. № 698865 известно устройство для автоматического управления транспортным механизмом, содержащее блок адресов ячеек, выход которого соединен с первым выходом блока считывания адреса, первый выход блока считывания адреса подключен к первому входу блока оп-. ределения положения транспортного механизма, выход которого соединен через блок выбора направления движения с первым входом испол-нительного блока, первый вь1ход исполнительного блока через блок задания адреса подключен к первому входу блока преобразования кода, выход которого соединен с первым входом блока памяти адреса, выход блока памяти адреса и первый выход блока сигналов переключения скорости соединены соответственно с вторым и третьим входами блока определения поления транспортного механизма, второй выход блока сигналов переключения скорости подключен к второму входу исполнительного блока, второй выход исполнительного блока соединен с входом первого блока контроля каналов, первый выход которого подключен к второму входу блока преобразования кода, а второй выход подключен к второму входу блока памяти адреса, второй выход блока считывания адреса соединен с входом второго блока контроля каналов, первый выход которого подключен к второму входу блока считывания адреса, а второй выход соединен с третьим входом исполнительного блока 1.
Недостатком данного устройства является отсутствие возможности определения оптимальной скорости и пути замедления при адоесовании i транспортного механизма на расстояния, при которых он не успевает развить номинальной установившейся скорости. В данном устройстве путь замедления транспортного механизма определен строго установленной и неизменной величиной, равной пути торможения транспортного механизма от номинальной скорости до установочной (ползучей).
Цель изобретения - повышение точности.
Указанная цель достигается тем, что устройство для управления транспортным механизмом, содержашее блок адресов ячеек, выход которого соединен с первым входом блока считывания адреса, первый выход блока считывания адреса подключен к первому входу блока определения положения транспортного механизма, выход которого соединен через блок выбора направления движения с первым входом исполнительного блока, первый выход исполнительного блока через блок задания адреса подключен к первому входу блока преобразования кода, выход которого соединен с первым входом блока памяти адреса, выход блока памяти адреса и первьш выход блока сигналов переключения скорости соединены соответственно с вторым и третьим входами блока определения положения транспортного механизма, второй выход блока сигналов переключения к второму входу исполнительного
блока, второй выход исполнительного блока соединен с входом первого блока контроля каналов, первый выход которого подключен к второму входу блока преобразования кода, а второй выход подключен к второму входу блока памяти адреса, второй выход блока
5 считывания адреса соединен с входом второго блока, контроля каналов, первый выход которого подключен к второму входу блока считывания адреса, а второй выход соединен с третьим входом исполнительного блоQ ка, снабжено блоком определения начала замедления, первая группа входов которого соединена с выходами блока памяти адреса со сдвигом на один разряд, вторая - с выходами блока считывания адреса, а выход - с входным усилителем блока переключения
5 скорости, при этом входной усилитель выполнен суммируюшим.
Блок определения начала замедления состоит из разрядного сумматора и элементов ИЛИ-НЕ и И, выход одного из которых является выходом блока, -а входы подключены
0 соответственйо к выходам разрядного сумматора и выходу элемента ИЛИ-НЕ, один и другой входы которого подключены соответственно к выходу последнего разряда блока памяти адреса и выходу другого элемента И, входы которого соединены с выходами
блока памяти адреса, соединенными с одними входами разрядов сумматора, образуюшими первую группу входов блока, другая группа входов которого .образована другими входами разрядов сумматора.
На чертеже представлена структурная схема устройства.
Устройство содержит блок 1 адресов ячеек, выход которого соединен с первым входом блока 2 считывания адреса, первый
5 выход блока 2 считывания адреса подключен к первому входу блока 3 определения положения транспортного механизма, второй вход блока 3 определения положения транспортного механизма подключен к первому выходу блока 4 памяти адреса, вход которо0 го подключен к выходу-блока 5 преобразования кода, вход которого подключен к выходу блока 6 задания адреса, второй выход блока 2 считывания адреса соединен с входом второго блока 7 контроля каналов, первый выход которого подключен к второму входу блока J считывания адреса, а второй выход второго блока 7 контроля каналов подключен к третьему входу блока 2 считывания адреса, вход блока 8 выбора направ ления движения подключен к первому выходу блока 3 определения положения транспортного механизма, первый вход первого блока 10 контроля каналов подключен к нулевой шине питания, один из выходов первого блока 10 контроля каналов подключен к второму входу блока 5 преобразования кода, а второй выход первого блока 10 контроля каналов подключен к второму входу блока 4 памяти адреса, первый вход исполнительного блока 11 подключен к выходу блока 8 выбора направления, второй выход подключен к первому выходу второго блока 7 контроля каналов, третий вход подключен к выходу блока 9 сигналов переключения скорости, четвертый вход подключен к первому выходу блока 4 питания адреса, выход исполнительного блока 11 подключен к второму входу первого блока 10 контроля каналов.. Блок 12 определения начала замедления состоит из разрядного сумматора 13 (количество- разрядов зависит от длины пути торможения), первого элемента 14 И, второго элемента 15 И и элемента 16 ИЛИ-НЕ, первый вход первого разряда сумматора 13 подключен к выходу второго разряда блока 4 памяти адреса, второй вход первфго разряда сумматора 13 подключен к выходу первого разряда Памяти блока 2 считывания адреса, первый вход второго разряда сумматора 13 подключен к выходу третьего разряда блока 4 памяти адреса, второй вход второго разряда сумматора подключен к выходу второго разряда блока 2 считывания адреса, первый вход третьего разряда сумматора 13 подключен к выходу четвертого разряда блока 4 памяти адреса, второй вход третьего разряда сумматора 13 подключен к выходу третьего разряда памяти блока 2 считывания адреса, выход первогб разряда сумматора 13 подключен к первому входу элемента 14 И, выход с второго разряда сумматора 13 подключен к второму выходу элемента 14 И, выход с третьего .разряда сумматора 13 подключен к третьему входу элемента 14 И, выход элемента 14 И подключен к второму входу усилителяблока 9 сигналов переключения скорости, первый вход элемента 15 И подключен к первому входу элемента 16 ИЛИ-НЕ, к второму входу которого подключен выход с пятого разряда блока 4 памяти адреса, а выход элемента 16 ИЛИ-НЕ подключен к четвертому входу элемента 14 И. Устройство работает следующим образом. Номер адреса, куда нужно отправить транспортный механизм, набирается в блоке 6 задания адреса в десятичном исчислении, преобразуется в блоке 5 преобразо вания кода и запоминается в блоке 4 памяти адреса (при использовании стандартного устройства ввода информации с перфокарты, перфоленты и других носителей информации). Сигнал, минуя блок 5 преобразования кода, поступает в блок 4 памяти адреса. С выхода блока 4 памяти адреса закодированная информация поступает на первый вход блока 3 определения положения транспортного механизма. На второй вход блока 3 определения положен-ия транспортного механизма подается информация в цифровом двоичном коде о действительном положении транспортного механизма, которая формируется датчиками считывания информации блока 2 считывания адреса, размещенного на транспортном механизме. Контроль записи адреса и считывания информации выполняется первым 10 и вторым 7 блоками контроля каналов. В процессе движения считыватель информации блока 2 считывания адреса проходит возле носителей информации блока 1 адресов ячеек и периодически передает текущую информацию о действительном положении транспортного механизма в блока 3, сравнивая действительные и заданные величины. В результате сравнения двух величин, поступающих в блок 3 определения положения транспортного механизма из блока 4 памяти заданного адреса и блока 2 считывания текущего адреса, вырабатываются посредством блока 8 выбора направления движения и блока 9 сигналов переключения скорости команды по управлению исполнительным блоком 11. К таким командам относятся команды о включении исполнительного блока, направления движения, переключения скорости на доводочную, точного позиционирования. Когда транспортный механизм развивает установивщуюся номинальную скорость, его путь замедления от начала торможения строго постоянен и определяется ускорением замедления. Когда транспортный механизм не успевает развить установившейся номинальной скорости до момента начала торможения, его путь замедления различен при постоянном ускорении замедления и зависит от величины скорости, которую развивает транспортный механизм в момент начала торможения. Для определения начала замедления в случаях, когда транспортный механизм не развивает номинальной скорости служит блок 12 определения начала замедления, который работает следующим образом. Двоичное число, снимаемое на входы сумматора 13с выхода блока 4 памяти адреса, в два раза меньще числа, записанного в блоке 4 памяти адреса, следовательно, сигнал на выходе блока 12 определения начала замедления, снимаемый с выхода элемента 14 И, поступает в блок 9 сигналов переключения скорости, когда транспортный механизм проходит половину пути. При условии равенства ускорений разгона и замедления равны и пути разгона и замедления. Следовательно, когда транспортный механизм проходит половину пути, на выходе элемента
14 И блока 12. определения начала замедления формируется сигнал начала торможения при совпадении чисел, поступающих на первую группу входов сумматора 13 от блока 4 памяти адреса с числами, поступившими на вторую группу входов от блока 2 считывания адреса в дополнительном коде.
Транспортный механизм начинает замедление до доводочной скорости и точно останавливается в заданном адресе.
Число, после которого происходит запрет прохождения сигнала от элемента 14 И, (т.е. исключается работа блока 12) формируется элементами 15 И и 16 ИЛИ-НЕ. Это число определяется конкретными параметрами разгона механизма и равно пути разгона до номинальной скорости. Так, например, на чертеже представлена сформированная схема .запрета работы блока 12 определения начала замедления, когда число заданного адреса, записанного в блоке 4 памяти , равно 10 или более Ш, т. е. в данном случае разгон транспортного ме ханизма до номинальной скорости обеспечен в зоне 10 адресов. Переключение скорости и останов при номинальной скорости движения формируются в блоке 9 сигналов переключения скорости и останова. Блок 9 формирует сигналы переключения скорости
на строго определенном расстоянии до заданного адреса и останов в зоне адреса.
Использование предлагаемого устройст-. ва для управления транспортным механяамом повышает его производительность тем оптимизации торможения и сокращений
времени движения на доводочной скорости, т.е. путем сокращения технологического цикла.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления скоростью транспортного средства | 1982 |
|
SU1117264A1 |
| Устройство для управления транспортным механизмом | 1977 |
|
SU698865A1 |
| Устройство управления приводом механизма передвижения транспортного средства для обслуживания стеллажа | 1986 |
|
SU1402520A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТОРМОЗНОГО ПРОЦЕССА ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2038237C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1991 |
|
RU2018902C1 |
| Устройство для автоматического адресо-ВАНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU822201A1 |
| Приемное устройство дополнительной цифровой информации, передаваемой в составе кадрового гасящего импульса полного телевизионного сигнала | 1988 |
|
SU1653179A1 |
| Многоканальное устройство для сбора, обработки и выдачи информации | 1990 |
|
SU1753482A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Преобразователь временных интервалов в код | 1981 |
|
SU942560A1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ по авт. св. № 698865, отличающееся тем, что, с ц,елью повышения точности, оно снабжено блоком определения начала замедления, первая группа входов которого соединена с выходами блока памяти адреса со сдвигом на один разряд, вторая - с выходами блока считывания адреса, а выход - с входным усилителем блока переключения скорости, при этом входной усилитель выполнен суммирующим. 2. Устройство по п. 1, отличающееся тем, что блок определения начала замедления состоит из разрядного сумматора и элементов ИЛИ-НЕ и И, выход одного из которых является выходом блока, а входы подключены соответственно к выходам разрядного сумматора и выходу элемента ИЛИ-НЕ, один и другой входы которого подключены соответственно к выходу последнего разряда блока памяти адреса и выходу другого элемента И, входы- которого соединены с выходами блока памяти адреса, соединенными с одними входами разрядов сумматоров, образующими первую группу входов блока, другая группа входов которого образована другими входами разрядов сумматора.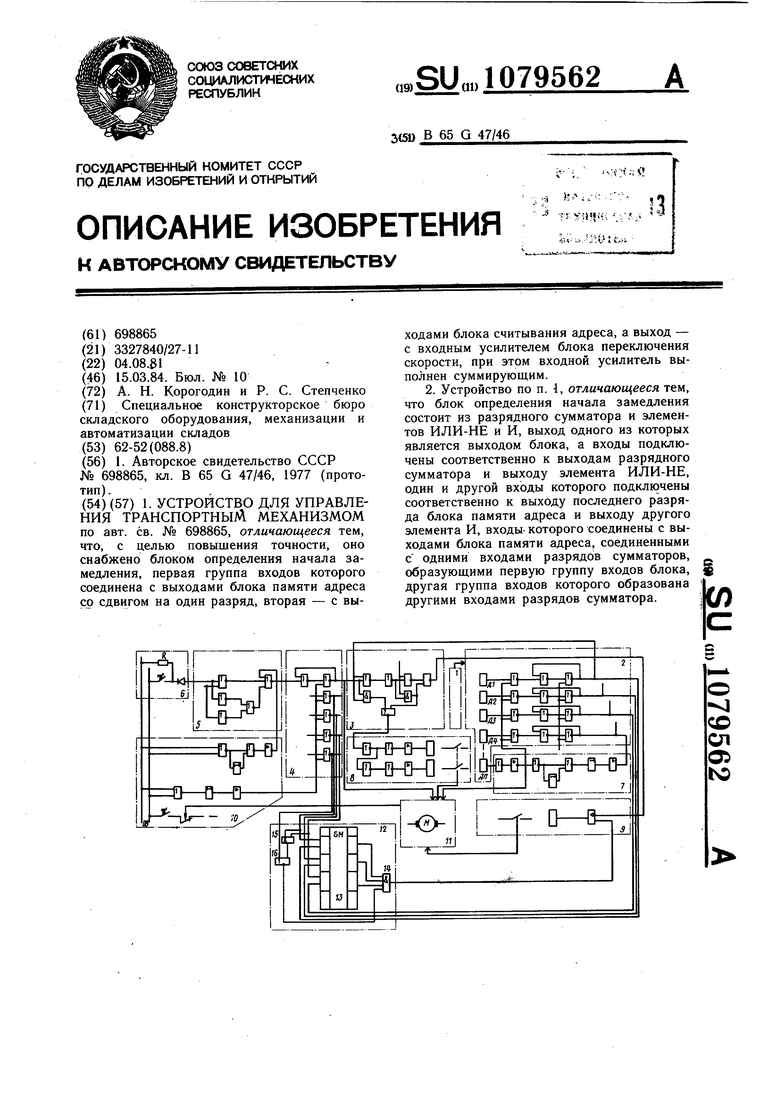
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления транспортным механизмом | 1977 |
|
SU698865A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
