г1
Изобретение относится к электротехнике, и предназначено для исполь зования в системах автоматизированного электропривода переменного тока.
Известен частотно-упр&вляемый электропривод, содержащий автономный инвертор тока и систему управления, формирующую частоту тока якоря в зависимости от измеренной частоты вращёния ротора ij .
Недостаток такого электроприводаналичие сочлененного с валом двигателя датчика частоты вращения, что ограничивает область его применения, Кроме того, отсутствие контроля вза- имной ориентации векторов тока и по. .токосцепления двигателя не позволяет обеспечить высокие динамические показатели электропривода.
Наиболее близким к предлагаемому является частотно-управляемый электропривод, содержащий электродвигатель переменного тока, последовательно соединенные между собой управляеыый выпрямитель и автономный инвертор тока, на выход которого подключен электродвигатель переменного тока, систему управления, соединенную первыми входа с датчиками потокосцепления машины, а вторым входом через измерительный выпрямитель - с датчиками тока, включенными во входные цепи управляемого выпрямителя, а выходами - с входами блоков управления выпрямителя и инвертора, формирователь фазных токов, соединенный с выходом измерительного выпрямителя {2J,
Наличие в таком электроприводе датчиков тока якоря, которые должны работать в широком диапазоне частот, в том числе и на весьма низких частотах, существенно усложняет схему электропривода. В случае использования в формирователе фазных токов трансформаторов тока двигателя они должны быть рассчитан на -минимальную частоту рабочего диапазона, поэтому их габариты получаются значительными, а точ:ность сравнительно невысока. Датчики тока, работающие по принципу модуляция - демодуляция, обеспечи;вают i высокую точность измерения при «изких частотах, однако имеют ограниченную полосу пропускания, т.е. работают с .заметными погрешностями в зоне высоких частот рабочего диапазона. Кроме того, такие датчики
62
имеют довольно сложное устройствоj высокую стоимость и требуют наличие дополнительного источника питания, электрически не связанного с основным.
Цель изобретения - упрощение электропривода и расширение диапазона регулирования скорости.
Поставленная цель достигается тем, что в частотно-управляемом электроприводе, содержащем: электродвигатель переменного тока, последовательно соединенные между собой управляемьй выпрямитель с автономным инвертором тока, на выход которого подключен электродвигатель переменного тока, систему управления, соединенную первыми входами с датчиками потокосцепления машины, а вторым входом через измерительный выпрямитель с - датчиками тока, включенными в линейные провода, предназначенные для подключения к сети переменного тока, а выходамис входами блоков управления выпрямителя и инвертора, форкмрователь фазных токов, соединенный с выходом измерительного выпрямителя, формирователь фазных токов снабжен инвертирующим усилителем и шестью полупроводниковыми ключами, управляющие входы которых подключены к многофазному выходу блока управления инвертором, причем три ключа включены между входом и выходами формирователя фазных токов двигателя, а три других - между выходами формирователя фазных токов двигателя и выходом инвертирующего усилителя, вход которого является входом формирователя фазных токов.
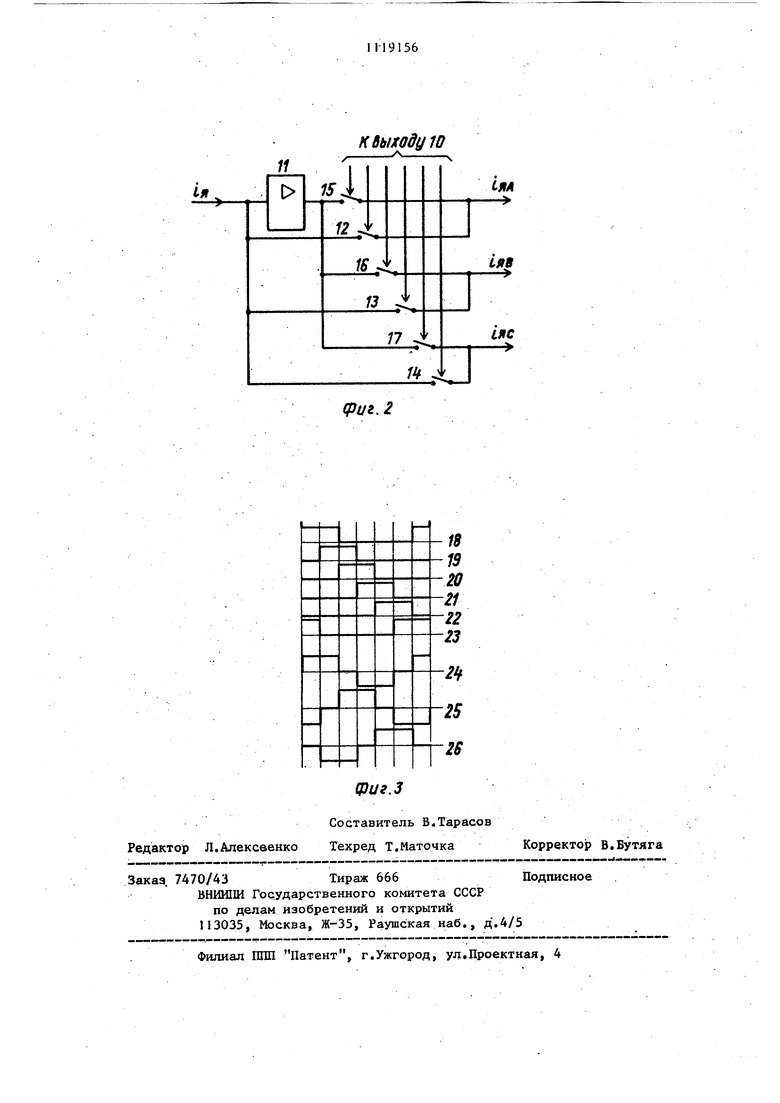
На фиг. 1 представлена блок-схема предлагаемого электропривода; на фиг. 2 - блок-схема формирователя фазных токов двигателя; на диаграмма напряжений формирователя. фазных токов двигателя.
Электропривод содержит последовательно соединенные управляемый выпрямитель 1 , автономный инвертор 2 тока, к- выходу которого подключен электродвигатель 3 переменного тока с подключенными к нему датчиками 4 потокосцепления. So входные цепи управляемого выпрямителя датчики 5 тока,подключенные через измерительный выпрямитель 6 к второму входу системы 7 управления, первый
3
вход которой соединен с датчиками потокосцепления. С выходом ;измерительного выпрямителя соединен формирователь 8 фазных токов. Вьпсод ситемы 7 управления соединен с входами блоков 9 и 10 .управления соответственно управляемого выпрямителя и автономного инвертора тока.
Формирователь 8 фазных токов электродвигателя (фиг.2) содержит инвертирующий усилитель 11 и шесть полупроводниковых ключей 12-17. Ключи 12,13 и 14 включены между вхо|дом формирователя 8 фазных токов электродвигателя.и тремя его выходами, а ключи 15,16 и 17 - между выходом инвертирующего усилителя I1 и выходами формирователя 8 фазных токов двигателя. Управляющие входы ключей I2 - 17 подключены к многофаному выходу системы 7 управления инвертором..
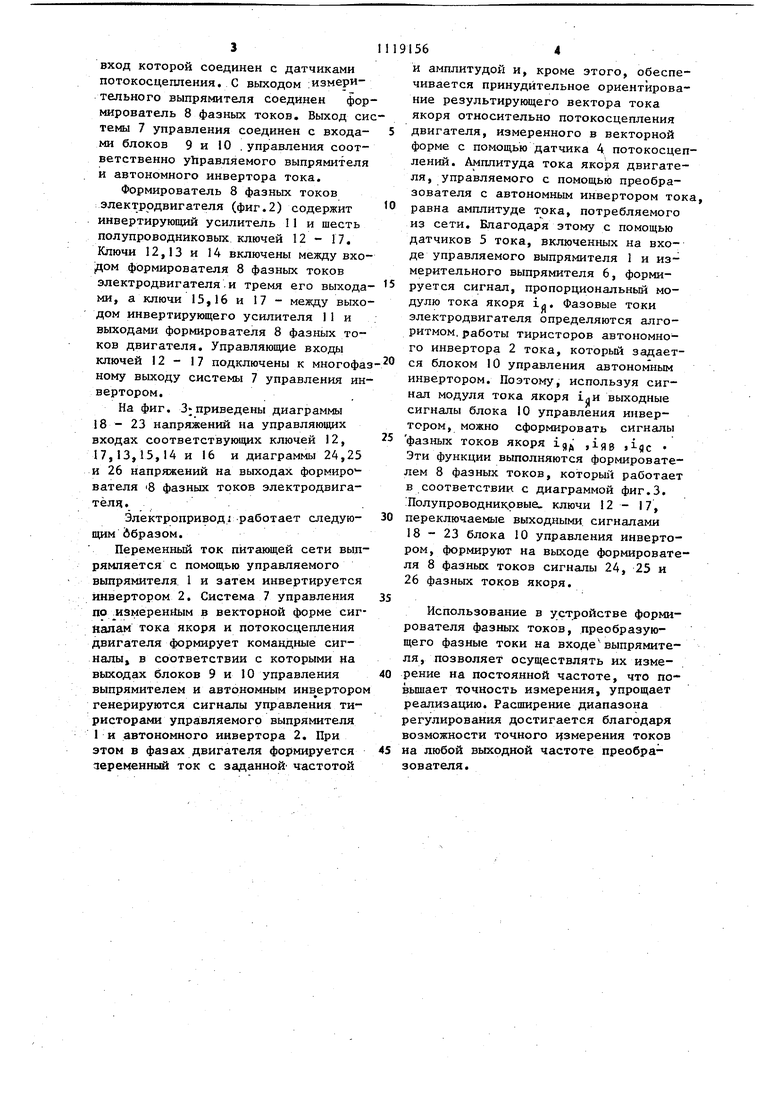
На фиг. 3;приведены диаграммы 18 - 23 напряжений на управляющих входах соответствующих ключей I2, 17,13,15,14 и 16 и диаграммы 24,25 и 26 напряжений на выходах формирователя iB фазных токов электродвигатёлч.
Электропривод; работает следующим йбразом.
Переменный ток питающей сети выпрямляется с помощью управляемого выпрямителя. 1 и затем инвертируется инвертором 2. Система 7 управления по измеренным в векторной форме сигвалам тока якоря и потокосцегшения двигателя формирует командные сигналы, в соответствии с которыми на выходах блоков 9 и 10 управления выпрямителем и автономным инв ерторо генерируются сигналы управления тиристорами управляемого выпрямителя 1 и автономного инвертора 2. При этом в фазах двигателя формируется переменный ток с заданной частотой
191564
и амплитудой и, кроме этого, обеспечивается принудительное ориентирование результирующего вектора тока якоря относительно потокосцепления
5 двигателя, измеренного в векторной форме с помощью датчика 4 потокосцеплений. Амплитуда тока якоря двигателя, управляемого с помощью преобразователя с автономным инвертором тока,
0 равна амплитуде тока, потребляемого из сети. Благодаря этому с помощью датчиков 5 тока, включенных на входе управляемого выпрямителя 1 и измерительного выпрямителя 6, форми5 руется сигнал, пропорциональный модулю тока якоря i/j. Фазовые токи электродвигателя определяются алгоритмом, работы тиристоров автономного инвертора 2 тока, который задает0 ся блоком 10 управления автономным инвертором. Поэтому, используя сигнал модуля тока якоря 1лН выходные сигналы блока 10 управления инвертором, можно сформировать сигналы
5 фазных токов якоря i ,1яв Эти функции выполняются формирователем 8 фазных токов, который работает в соответствии с диаграммой фиг.З. Полупроводниковые, ключи 12 - 17,
0 переключаемые выходными, сигналами 18-23 блока 10 управления инвертором, формируют на выходе формирователя 8 фазных токов сигналы 24, 25 и 26 фазных токов якоря.
Использование в устройстве формирователя фазных токов, преобразующего фазные токи на входе выпрямителя, позволяет осуществлять их изме0 рение на постоянной частоте, что повьшает точность измерения, упрощает реализацию. Расширение диапазона регулирования достигается благодаря возможности точного измерения токов
5 на любой выходной частоте преобразователя.
квыходую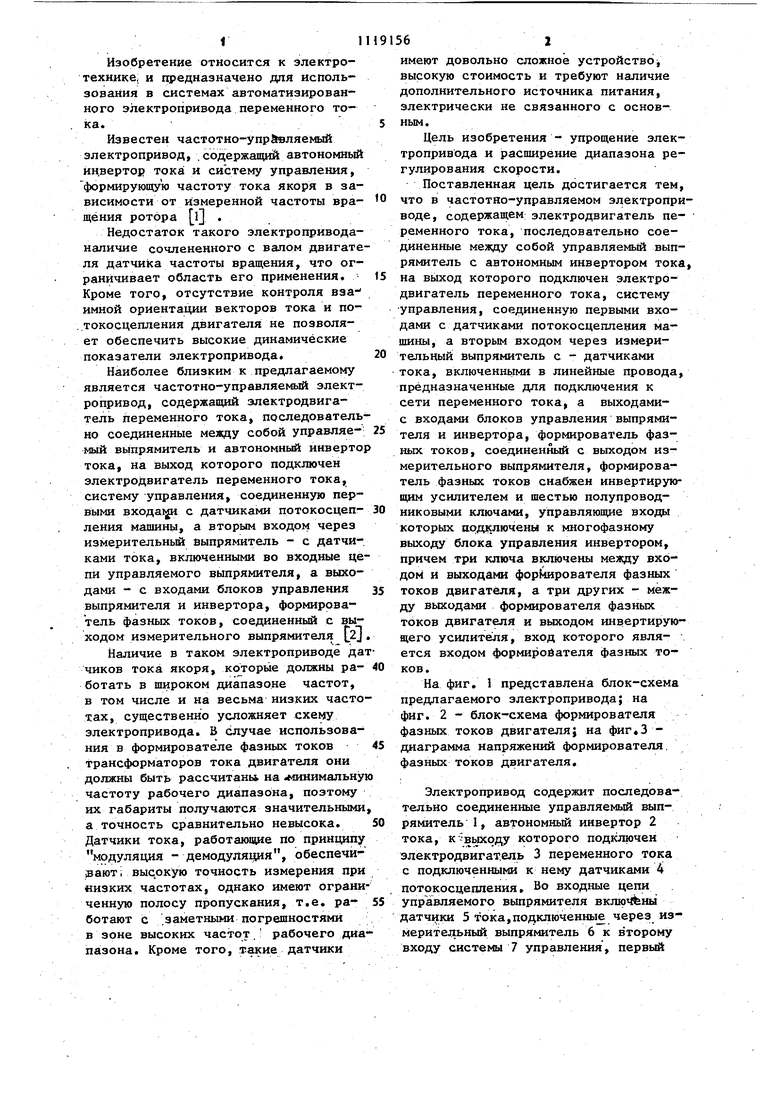
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Частотно-регулируемый асинхронный электропривод для испытательного стенда двигателей | 1984 |
|
SU1203682A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1672547A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
(риг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3671881, кл.31в-227, опублик | |||
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
