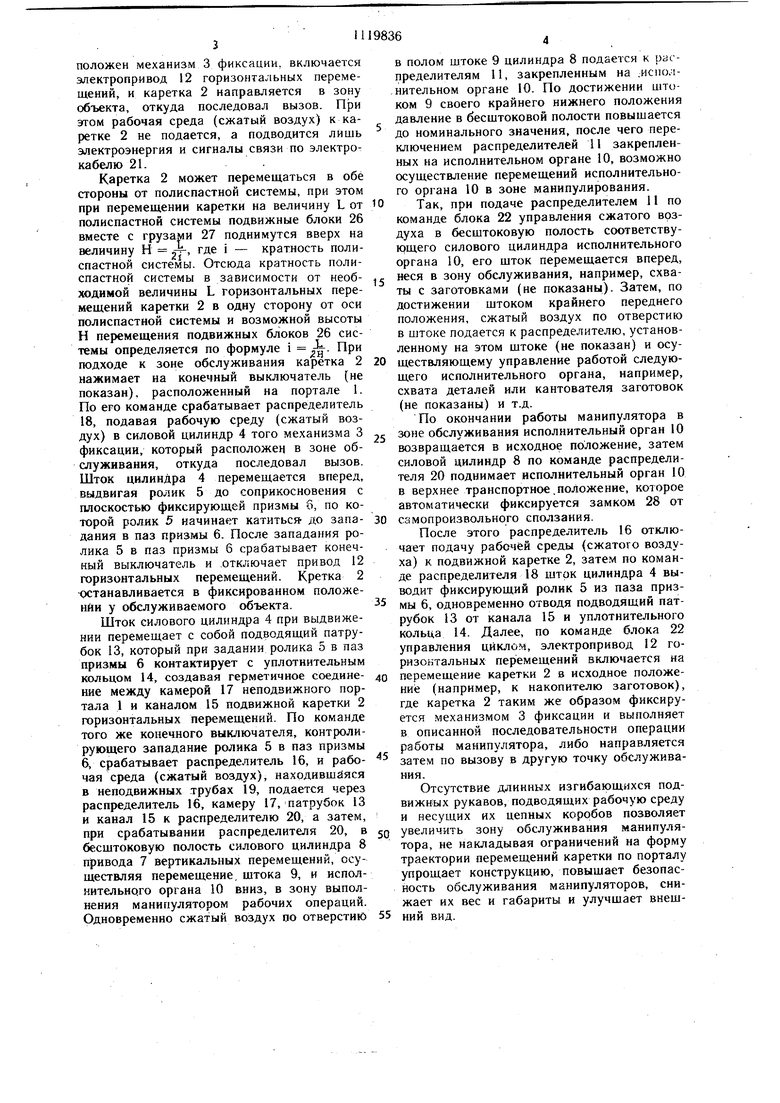
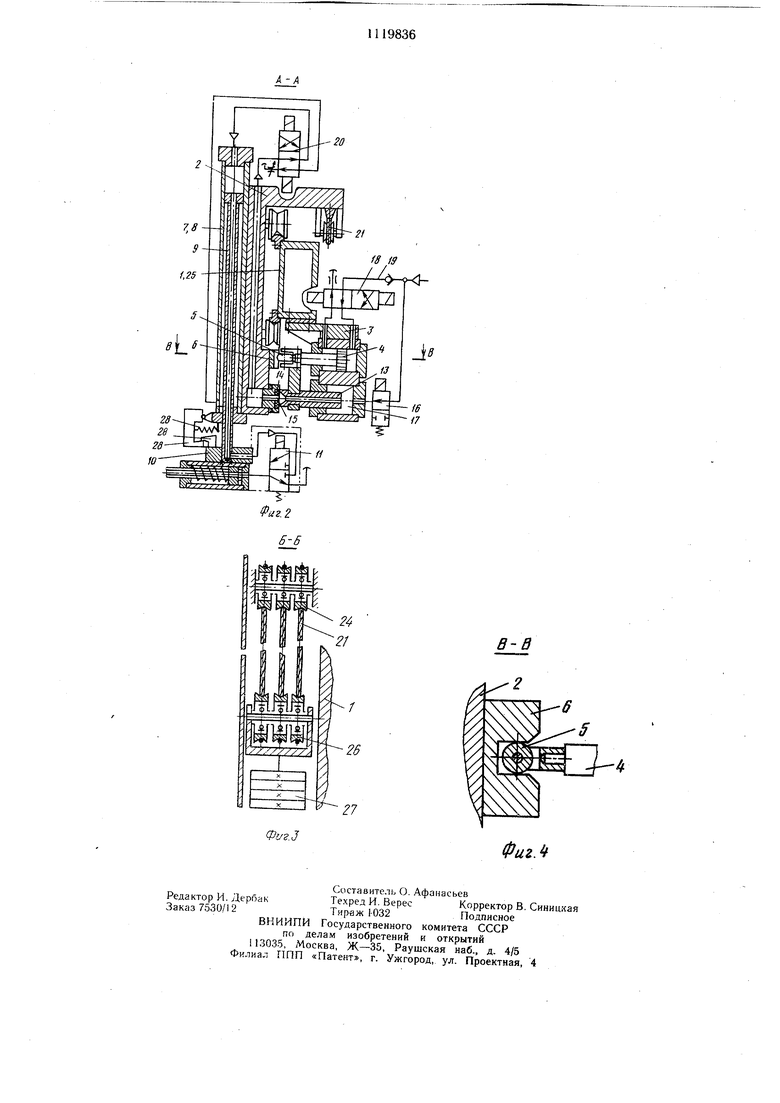
Изобретение относится к робототехнике, в частности к автоматическим манипуляторам (промышленным роботам) портального типа. Известен .автоматический манипулятор, содержащий установленный на основании портал и размещенную на нем каретку горизонтальных перемещений, связанную кабелем с электроприводом горизонтальных перемещений, привод вертикальных перемещений исполнительного органа, выполненный в виде силового цилиндра, связанного патрубками подачи рабочей среды с блоком управления движением исполнительного органа 1. Недостатком известного устройства яв. ляется малая величина перемещений каретки, которые в значительной мере ограничиваются наличием гибких рукавов подачи рабочей смеси. Эти рукава, размещенные в гибких коробах, имеют значительный вес, размеры и сложны в эксплуатации, а вследствие частого изгиба снижают надежность манипулятора в целом. Цель изобретения - расширение технологических возможностей. Цель достигается тем, что автоматический манипулятор, содержащий установленный на основании портал и размещенную на нем каретку горизонтальных перемещений, связанную кабелем с электроприводом горизонтальных перемещений, привод вертикальных перемещений исполнительного органа, выполненный в виде силового цилиндра, связанного патрубками подачи рабочей среды с блоком управления движением исполнительного органа, снабжен установленными на портале механизмами фиксации положения каретки горизонтальных перемещений, выполненными каждый в виде силового цилиндра с полым штоком, а каждый патрубок закреплен на этом штоке и связан через дополнительно введенный уплотнительный элемент с каналом подачи рабочейсреды привода вертикальных перемещений исполнительного органа, причем последний закреплен на каретке горизонтальных перемещений, а блок управления движением исполнительного органа размещен на штоках силовых цилиндров привода вертикальных перемещений и соединен с каналом подачи рабочей среды. На фиг. 1 изображен автоматический манипулятор портального типа общий вид сзади; на фиг. 2 - разрез Л-А на фиг. 1; на фиг. 3 - разрез В-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 2. Автоматический манипулятор содержит портал 1 с перемещающейся по нему кареткой 2 горизонтальных перемещений. На портале 1 в местах фиксированной остановки каретки 2 в зонах обслуживаемых объектов установлены механизмы 3 фиксации. включающие силовые цилиндры 4. На щтоках силовых цилиндров 4 закреплены фиксирующие элементы-ролики 5, фиксирующие относительно портала 1 каретку 2 горизонтальных перемещений, на которой закреплена фиксирующая призма б, снабженная пазом, в который западает при фиксации каретки 2 ролик 5. На каретке 2 установлен также привод 7 вертикальных перемещений, содержащий силовой цилиндр 8 с полым щтоком 9, на котором закреплен исполнительный орган 10 с расположенным на нем распределителем 11 и электропривод 12 горизонтальных перемещений. Со штоками силовых цилиндров 4 жестко связаны подводящие патрубки 13, периодически контактирующие с уплотнительным кольцом 14 канала 15 подачи рабочей среды к приводу 7 вертикальных перемещений и исполнительному органу, выполненному в каретке 2 горизонтальных перемещений. Рабочая среда, например сжатый воздух подводится к патрубкам 13 через распределители 16 и камеры 17, а к силовым цилиндрам 4 механизмов 3 фиксации - через распределители 18. Распределители 16 и 18 установлены на портале 1, и рабочая среда к ним подводится по неподвижным трубам 19, также закрепленным на портале 1, Рабочая среда к силовому цилиндру 8 вертикальных перемещений подводится через распределитель 20, установленный на каретке 2 горизонтальных перемещений и связанный с каналом 15 подачи рабочей среды, выполненным в той же каретке 2. На каретке 2 закреплен подвижный конец электрокабеля 21, подходящего электроэнергию к электроприводу 12 горизонталь- / ных перемещений и осуществляющего связь блока 22 управления цнклом манипулятора, расположенного в электрощкафу 23, с, аппаратами контроля и управления циклом, установленными на каретке 2 горизонтальных перемещений. Электрокабель 21 соединен с электрошкафом 23, установленным на портале 1, через полиспастную систему, неподвижные блоки 24 которой крепятся на верхней траверсе 25 портала 1, а подвижные блоки 26 при помощи грузов 27 осуществляют натяжение ветвей электрокабеля 2 в вертикальном направлеиии. Автоматический манипулятор снабжен также замком 28, который удерживает привод 7 вертикальных перемещений в транспортном положении (при отсутствии давления рабочей среды в цилиндре 8 вертикальных перемещений) от самопроизвольного опускания. Автоматический манипулятор работает следующим образом. По вызову одного из обслуживаемых объектов, в зоне каждого из которых расположен механизм 3 фиксации, включается электропривод 12 горизонтальных перемещений, и каретка 2 направляется в зону объекта, откуда последовал вызов. При этом рабочая среда (сжатый воздух) к каретке 2 не подается, а подводится лишь электроэнергия и сигналы связи по электрокабелю 21.
Каретка 2 может перемещаться в обе стороны от полиспастной системы, при этом при перемещении каретки на величину L от полиспастной системы подвижные блоки 26 вместе с грузами 27 поднимутся вверх на величину Н 2, где i - кратность полиспастной системы. Отсюда кратность полиспастной системы в зависимости от необходимой величины L горизонтальных перемещений каретки 2 в одиу сторону от оси полиспастиой системы и возможной высоты Н перемещения подвижных блоков 26 системы определяется по формуле i ,-. При подходе к зоне обслуживания каретка 2 нажимает на конечный выключатель (не показан), расположенный на портале 1. По его команде срабатывает распределитель 18, подавая рабочую среду (сжатый воздух) в силовой цилиндр 4 того механизма 3 фиксации, который расположен в зоне обслуживания, откуда последовал вызов. Шток цилиндра 4 перемещается вперед, выдвигая ролик 5 до соприкосновения с плоскостью фиксирующей призмы 6, по которой ролик 5 начинает катиться- до западания в паз призмы 6. После западания ролика 5 в паз призмы 6 срабатывает конечный выключатель и .отключает привод 12 горизонтальных перемещений. Кретка 2 чх танавливается в фиксированном положении у обслуживаемого объекта.
Шток силового цилиндра 4 при выдвижении перемещает с собой подводящий патрубок 13, который при задании ролика 5 в паз призмы 6 контактирует с уплотнительным кольцом 14, создавая герметичное соединение между камерой 17 неподвижного портала 1 и каналом 15 подвижной каретки 2 горизонтальных перемещений. По команде того же конечного выключателя, контролирующего западание ролика 5 в паз призмы 6, срабатывает распределитель 16, и рабочая среда (сжатый воздух), находившйяся в неподвижных трубах 19, подается через распределитель 16, камеру 17, патрубок 13 и канал 15 к распределителю 20, а затем, при срабатывании распределителя 20, в бесщтоковую полость силового цилиндра 8 привода 7 вертикальных перемещений, осуществляя перемещение, штока 9, и исполнительного органа 10 вниз, в зону выполнения манипулятором рабочих операций. Одновременно сжатый воздух по отверстию
в полом штоке 9 цилиндра 8 подается к распределителям 11, закрепленным на .исиол.нительном органе 10. По достижении штоком 9 своего крайнего нижнего положения давление в бесщтоковой полости повышается до номинального значения, после чего переключением распределителей 11 закрепленных на исполнительном органе 10, возможно осуществление перемещений исполнительного органа 10 в зоне манипулирования.
0 Так, при подаче распределителем 11 по команде блока 22 управления сжатого воздуха в бесштоковую полость соответствук щего силового цилиндра исполнительного органа 10, его шток перемещается вперед,
г неся в зону обслуживания, например, схваты с заготовками (не показаны). Затем, по достижении штоком крайнего переднего положения, сжатый воздух по отверстию в штоке подается к распределителю, установленному на этом штоке (не показан) и осу0 ществляющему управление работой следующего исполнительного органа, например, схвата деталей или кантователя заготовок (не показаны) и т.д.
По окончании работы манипулятора в
5 зоне обслуживания исполнительный орган 10 возвращается в исходное положение, затем силовой цилиндр 8 по команде распределителя 20 поднимает исполнительный орган 10 в верхнее транспортное.положение, которое автоматически фиксируется замком 28 от
0 самопроизвольного сползания.
После этого распределитель 16 отключает подачу рабочей среды (сжатого воздуха) к подвижной каретке 2, затем по команде распределителя 18 шток цилиндра 4 выводит фиксирующий ролик 5 из паза приз5 мы 6, одновременно отводя подводящий патрубок 13 от канала 15 и уплотиительного кольца 14. Далее, по команде блока 22 управления циклом, электропривод 12 горизонтальных перемещений включается на
перемещение каретки 2 в исходное положение (например, к накопителю заготовок), где каретка 2 таким же образом фиксируется механизмом 3 фиксации и выполняет в описанной последовательности операции работы манипулятора, либо направляется затем по вызову в другую точку обслуживания.
Отсутствие длинных изгибающихся подвижн ых рукавов, подводящих рабочую среду и несущих их цепных коробов позволяет
увеличить зону обслуживания манипулятора, не накладывая ограничений на форму траектории перемещений каретки по порталу упрощает конструкцию, повышает безопасность обслуживания манипуляторов, снижает их вес и габариты и улучшает внеш5 НИИ вид.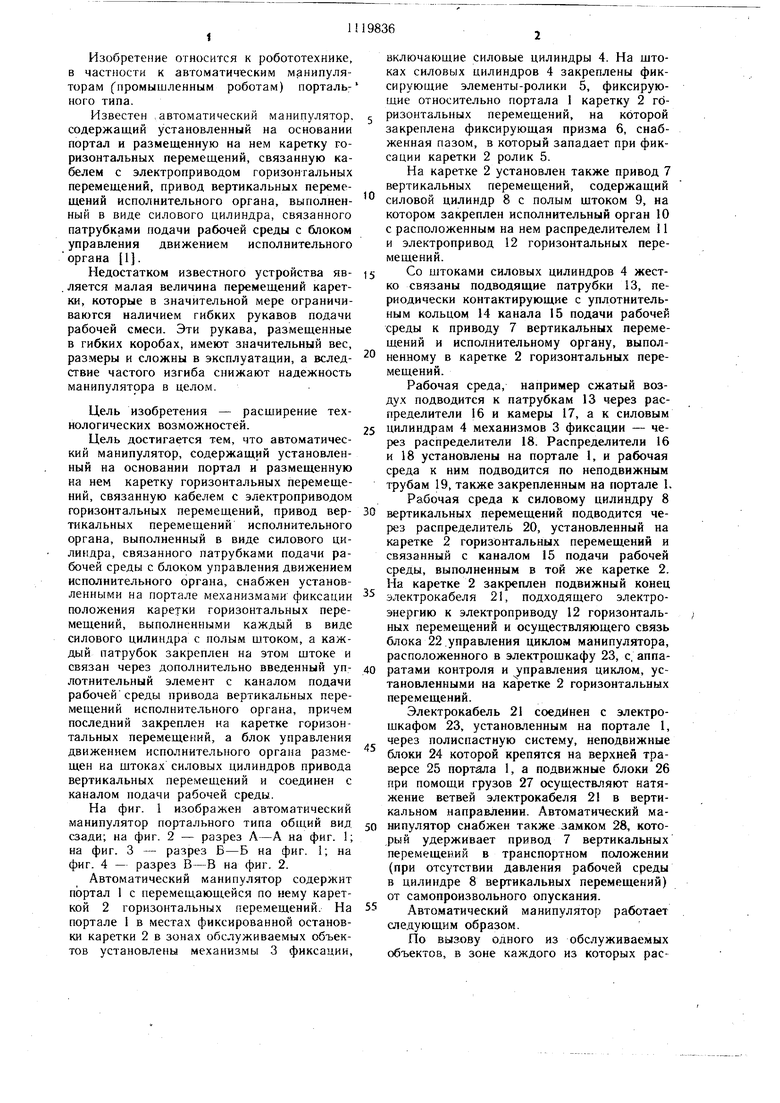
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки частей объемной секции корпуса судна | 1983 |
|
SU1134460A1 |
| Подвесной транспортный робот | 1986 |
|
SU1333571A1 |
| ПОРТАЛЬНЫЙ РОБОТ | 1988 |
|
RU2022770C1 |
| Установка для обработки отверстий в крупногабаритных деталях | 1989 |
|
SU1708540A1 |
| ПОРТАЛЬНЫЙ РОБОТ БЕЛЯЕВА Н.П. | 1992 |
|
RU2080243C1 |
| Автооператор | 1976 |
|
SU655506A1 |
| Металлорежущий станок для обработки отверстия ступицы железнодорожных колес | 2023 |
|
RU2809883C1 |
| Манипулятор для кантования корпусных деталей | 1990 |
|
SU1750941A1 |
| Манипулятор разборки облицованных кокилей | 1981 |
|
SU996094A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
АВТОМАТИЧЕСКИЙ МАНИПУЛЯТОР, содержащий установленный на основании портал и размещенную на нем каретку горизонтальных перемещений, связанную кабелем с электроприводом горизонтальных перемещений, привод вертикальных перемещений, исполнительного органа, выполненный в виде силового цилиндра, связанного патрубками подачи рабочей среды с блоком управления движением исполнительного органа, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен установленными на портале механизмами фиксации положения каретки горизонтальных перемещений, выполненными каждый в виде сиЛового цилиндра с полым штоком, а каждый патрубок закреплен на этом штоке и связан через дополнительно введенный уплотнительный элемент с каналом подачи рабочей среды привода вертикальных перемещений исполнительного органа, причем последний закреплен на каретке горизонтальных перемещений, а блок управления движением исполнительного органа размещен на штоках силовых цилиндров привода вертикальных перемещений и соединен с каналом подачи рабочей среды.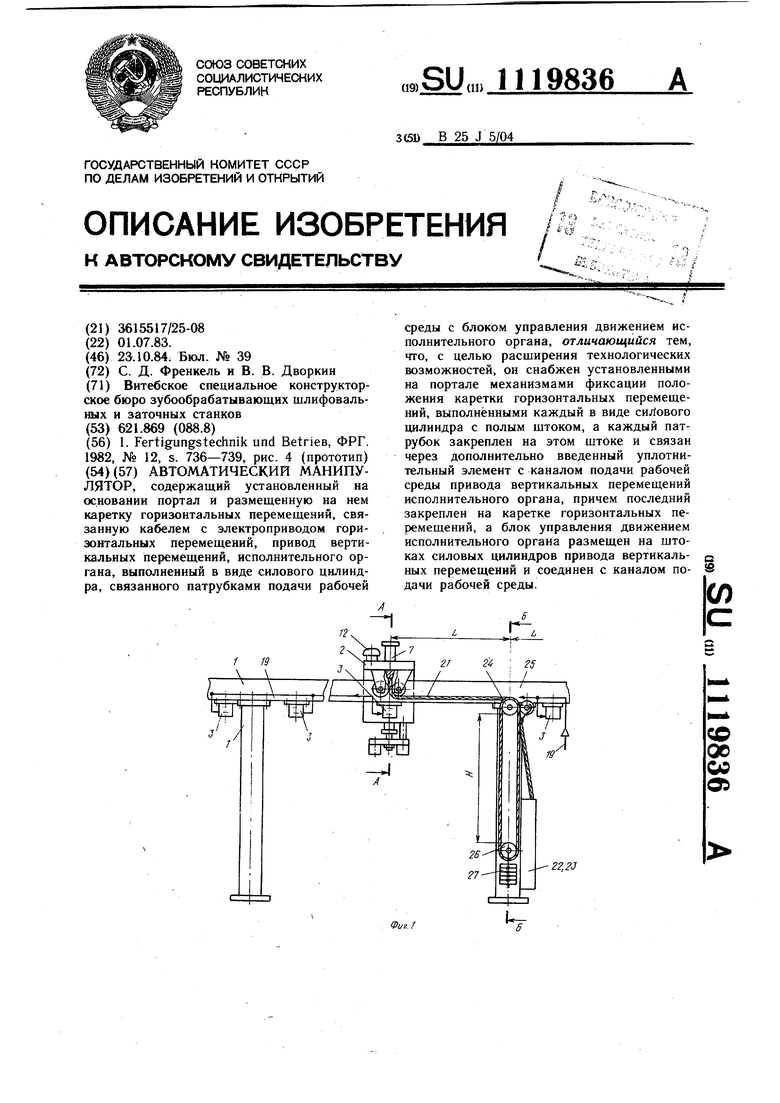
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Fertigungstechnik und BetricB, ФРГ | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| ЦУГАЛЬТНЫЙ ВИСЯЧИЙ ЗАМОК | 1923 |
|
SU736A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
