Изобретение относится к области машиностроения, в частности к устройствам для загрузки и разгрузки промышленного технологического оборудования, преимущественно металлорежуш,его, работающего в автоматических или в нолуавтоматических линиях или отдельными станками.
Известны автооператоры, представляющие собой 1еремешающуюся по направляющим каретку с з.ахватами, кинематически связанными с приводом 1.
Автооператор имеет отдельные силовые цилиндры на каждый захват, что усложняет привод и всю конструкцию в целом, снижает надежность при работе и технологичность при изготовлении автооператора.
Указанные недостатки устраняются в предложенном автооператоре тем, что кинематическая связь механизмов захвата с приводом выполнена в виде полиспастного механизма, блоки котброго расположены на неподвижных элементах захватов и на штоке силового цилиндра, а огибающий блоки эластичный элемент выполнен в виде цепи, прикрепленной концами к подвижным элементам захватов.
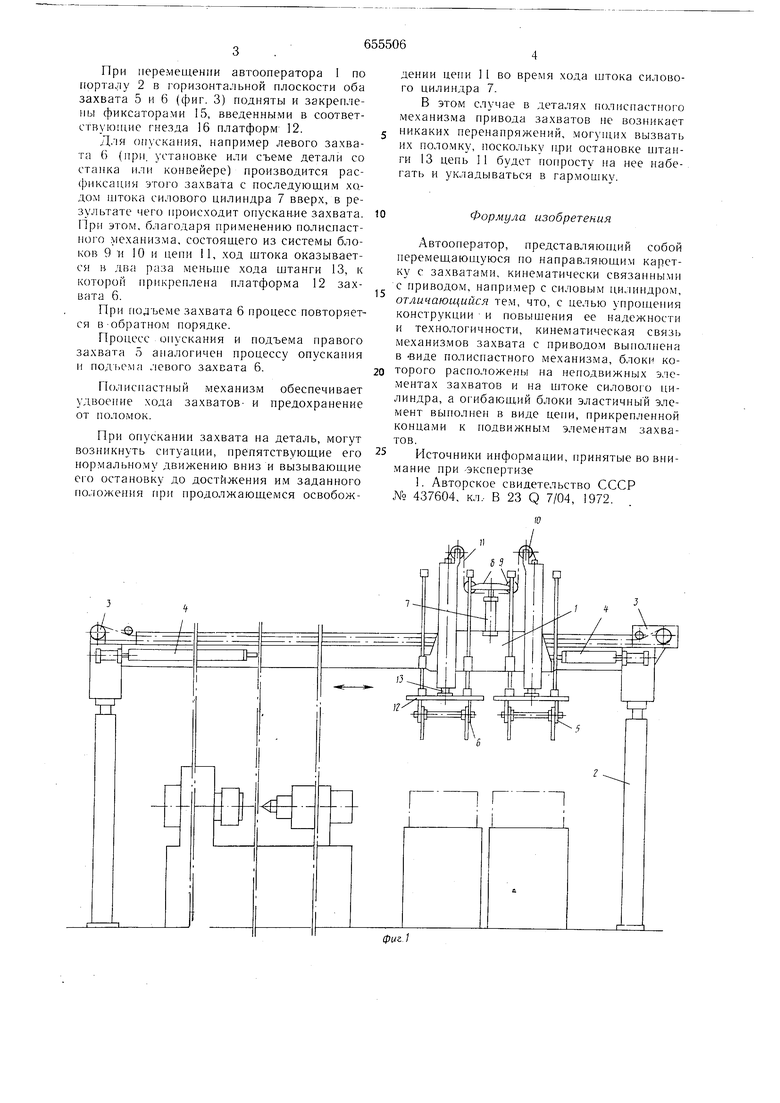
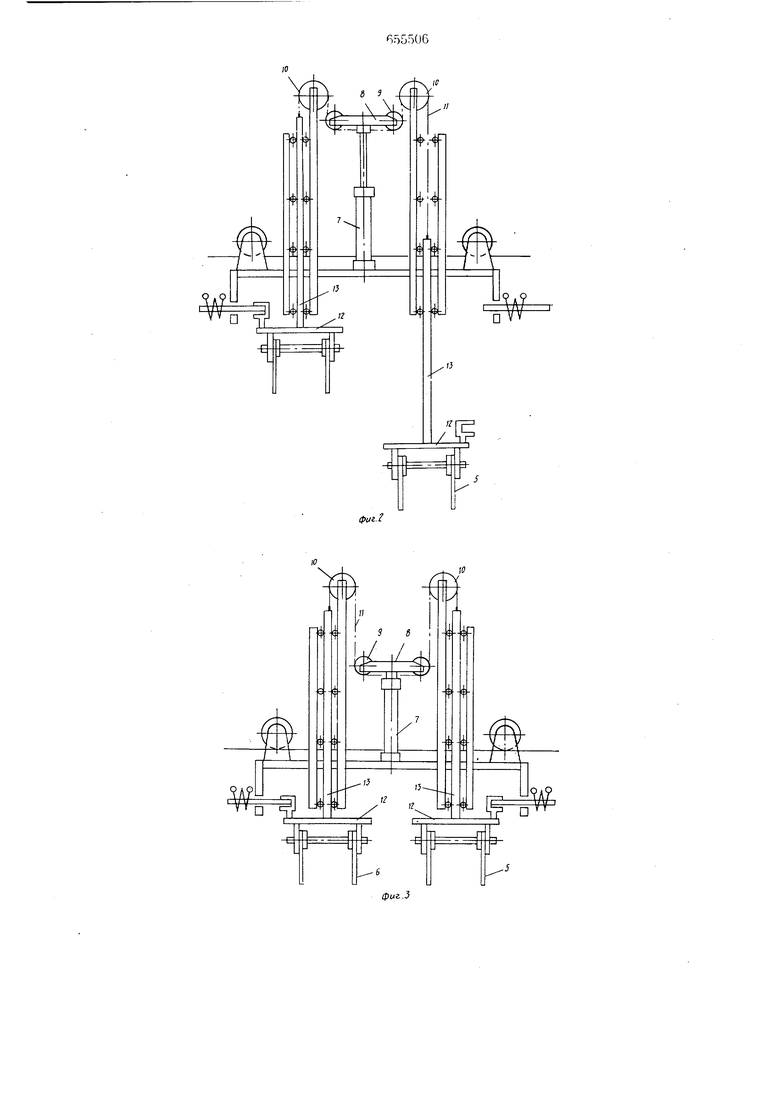
На фиг. 1 изображена компоновка автооператора со станочным оборудованием; на фиг. 2 - автооператор при работе правого захвата; на фиг. 3 - то же. исходное положение захватов; на фиг. 4 - то же, работа левого захвата.
Автооператор 1 компонуется со станочным оборудованием при помощи портала 2. Автоонератор имеет механизм 3 горизонтального перемещения его вдоль портала и механизмы 4 его фиксации в заданных положениях на портале 2.
Автооператор имеет захваты 5 ч 6, привод в виде силового цилиндра 7, на штоке которого расположена перекладина 8. На концах перекладины установлены блоки 9, образующие вместе с блоками 10, расположенными на неподвижных элементах захватов (например, на корпусе), и цепью 11 нолиспастный механизм. Каждый захват имеет платформу 12, соединенную со штангами 13. Автооператор смонтирован на тележке 14, имеющей фиксаторы 15, элементы которых входят в гнезда 16, выполненные на платформах 12.
Автооператор работает следующим образом.
При перемещении автооператора I по порталу 2 в горизонтальной плоскости оба захвата 5 и 6 (фиг. 3) подняты и закреплены фиксаторами 15, введенными в соответствующие гнезда 16 платформ 12.
Д,|я опускания, например левого захвата 6 (при. установке или съеме детали со станка пли конвейере) производится расфпксация этого захвата с последующим ходом штока силового цилиндра 7 вверх, в результате чего происходит опускание захвата. Г1ри этом, благодаря применению полиснастного .механизма, состоящего из системы блоков 9 И 10 и цепи 11, ход щтока оказывается в два раза меныпе хода щтанги 13, к которой прикреплена платформа 12 захвата 6.
При подъеме захвата 6 процесс повторяется в-обратном порядке.
Процесс опускания и подъема правого захвата 5 апалогпчеп процессу опускапия 11 подьема .leBoro захвата 6.
Полиспастный механизм обеспечивает удвоение хода захватов- и предохранение от поломок.
При опускании захвата па деталь, могут возникнуть ситуации, препятствующие его нор.мальному движению вниз и вызывающие его остановку до достижения им заданного положения при продолжающе.мся освобождении цепи 11 во время хода штока силового цилиндра 7.
В этом случае в деталях полиспастного механизма привода захватов не возникает ппкаких перенапряжений, могущих вызвать их поло.мку, поскольку п.ри остановке штанги 13 цепь И будет попросту на нее пабегать и укладываться в гармошку.
Формула изобретения
Автооператор, представляюп1ий собой перемещающуюся по направляющим каретку с захватами, кипематически связапными с приводом, например с силовым цилиндром, отличающийся тем, что, с целью упрошепия конструкции и повышения ее надежности и технологичности, кинематическая связь механиз.мов захвата с приводом выполнена в -виде полиспастного механизма, блоки которого расположены на неподвижных элементах захватов и на штоке силового цилиндра, а огибающий блоки эластичный элемент выполнен в виде цепи, прикрепленной концами к подвижным элементам захватов.
Источники информации, принятые во вни.манпе при -экспертизе
1. Авторское свидетельство СССР № 437604, кл.- В 23 Q 7/04, 1972.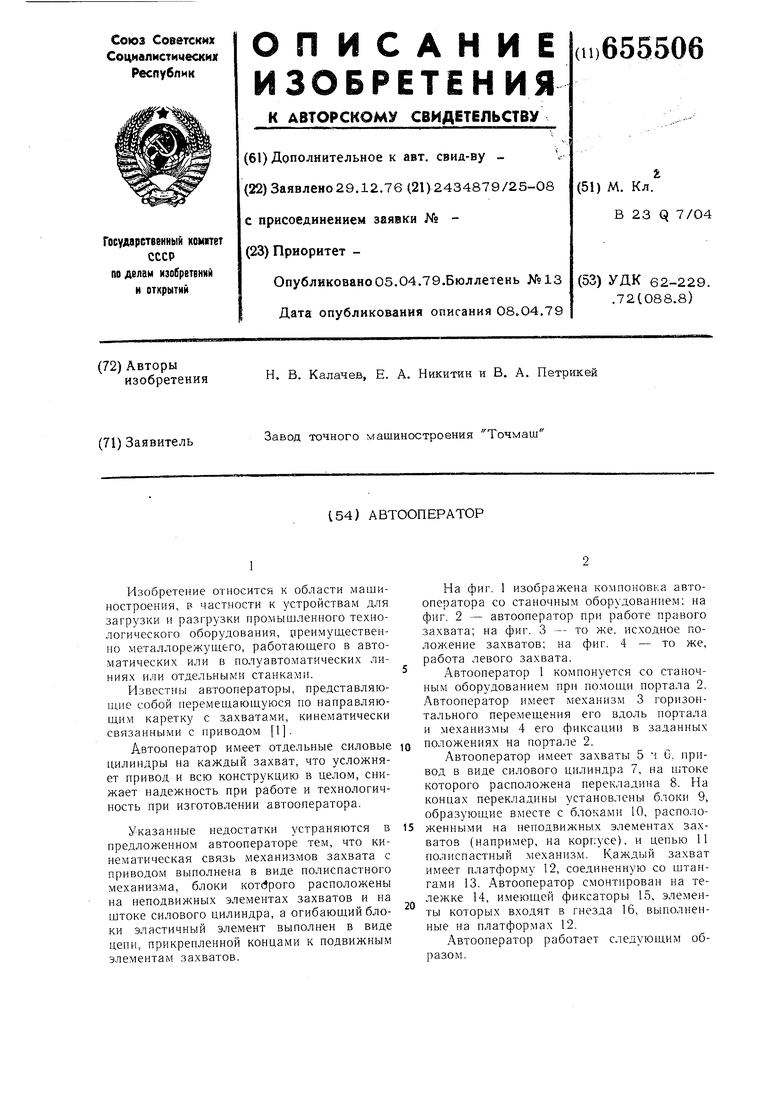
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU831513A1 |
| Автоматический манипулятор | 1983 |
|
SU1119836A1 |
| Манипулятор для кантования корпусных деталей | 1990 |
|
SU1750941A1 |
| Устройство для сборки и разборки форм трубчатых изделий | 1979 |
|
SU874376A1 |
| Устройство для передачи форм вагонеток | 1978 |
|
SU735402A1 |
| Устройство для распалубки бортов формы | 1990 |
|
SU1791131A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| йГевЕРЮВ^ | 1973 |
|
SU366943A1 |
| Подвесной транспортный робот | 1986 |
|
SU1333571A1 |
| Транспортное средство для перевозки элементов верхнего строения пути | 1983 |
|
SU1117358A1 |
,л иФ-fu
W
-Ф
t
J4
a.-fr
-f-r
г
Llf
UiJ
фигЛ
