СО
со о:
О
Изобретение относится к подъемнотранспортной технике, в частности к захватным устройствам для изделий с отверстием.
Известно захватное устройство для изделий с отверстием, содержащее навешиваемый на крюк грузоподъемного механизма несуший элемент, соединенную с ним штангу с шарнирно прикрепленным к ее нижней части коромыслом, механизмфиксации коромысла в рабочем и нерабочем положениях, включающий в себя направляющую и элемент управления механизмом фиксации, кинематически связанный с направляющей и коромыслом, и шарнирно соединенную с последним тягу 13.
Недостатком известного устройства является сложность конструкции и необходимость ручного труда при подготовке к работе.
Цель изобретения - упрощение конструкции и улучшение условий эксплуатации.
Указанная цель достигается тем, что в захватном устройстве для изделий с отверстием, содержащем навешиваемый на крюк грузоподъемного механизма несущий элемент, соединенную с ним штангу с шарнирно прикрепленным к еенижней части коромыслом, механизм фиксации коромысла в рабочем и нерабочем положениях, включающий в себя направляющую и элемент управления механизмом фиксации, кинематически связанный, с направляющей и коромыслом, и шарнирно соединенную с последним тягу, штанга выполнена с вертиксшьным пазом на нижнем конм це, в котором расположен шарнир коромЫсла, а тяга подпружинена относительно несущего элемента и снабжена жестко прикрепленным к нижнему конду опорным элементом, рабочая поверхность которого размещена под коромыслом, при этом элемент управления механизмом фиксации представляет собой палец,, жестко прикрепленный к верхнему концу тяги, перпендикулярно ей, а направляющая механизма фиксации образована фигурной прорезью, выполненной в несущем элементе,
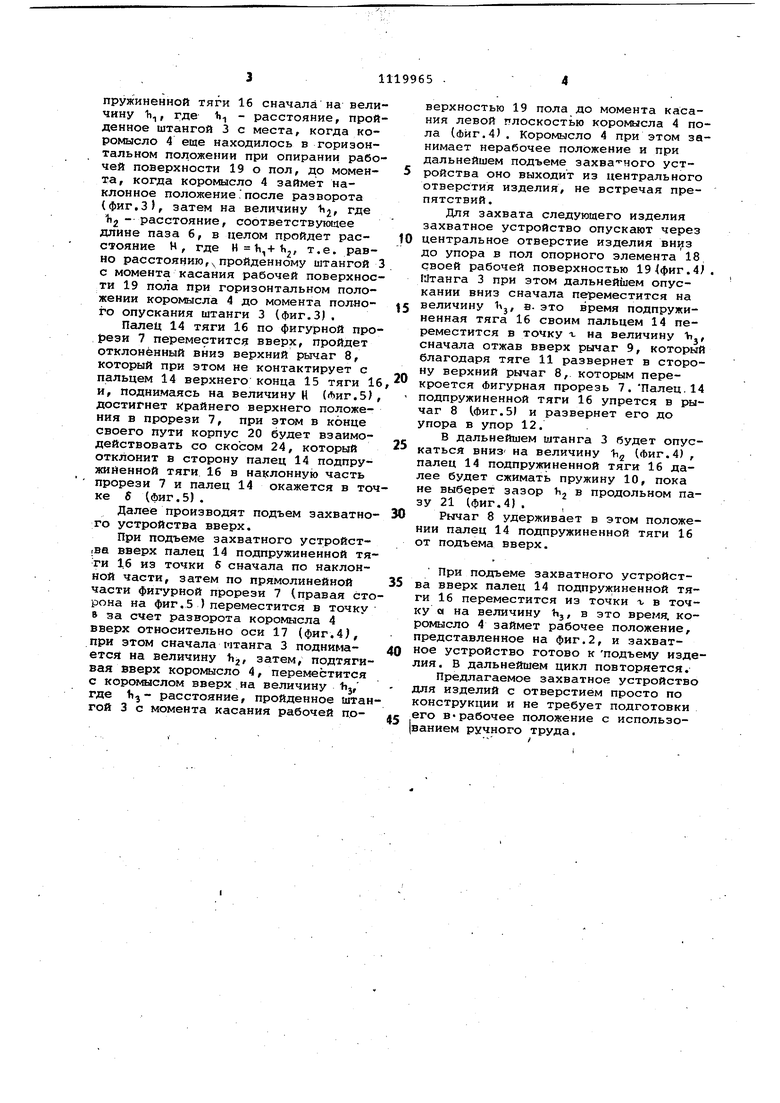
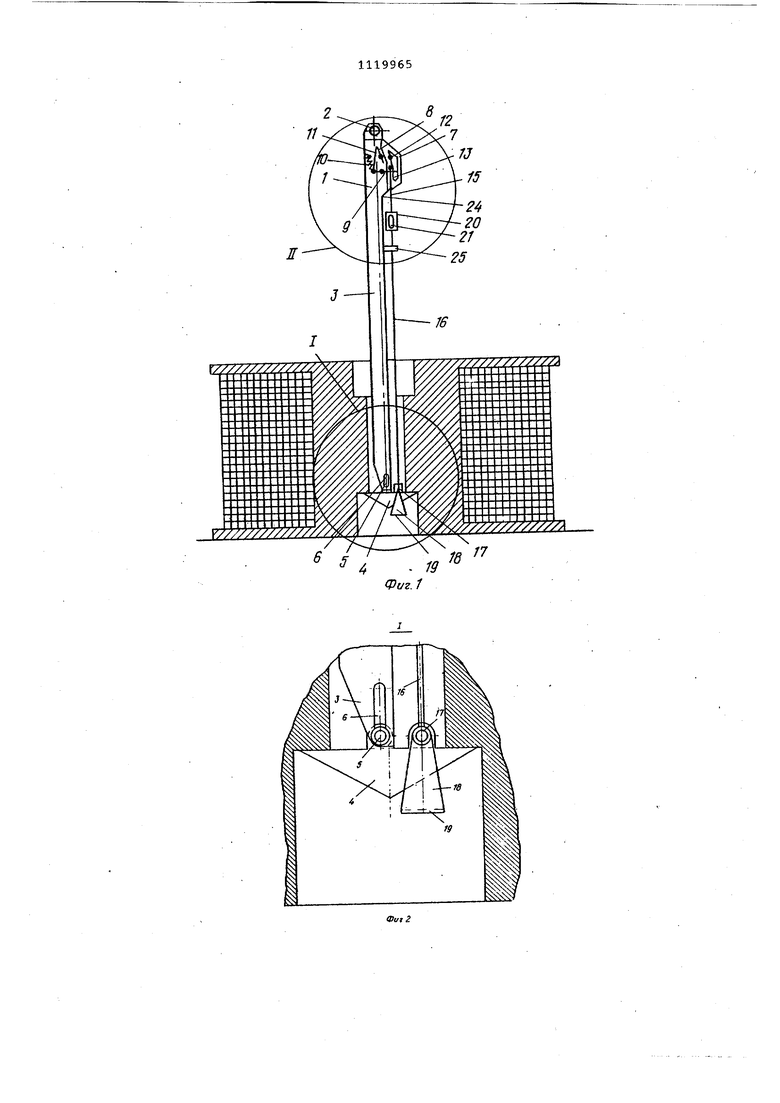
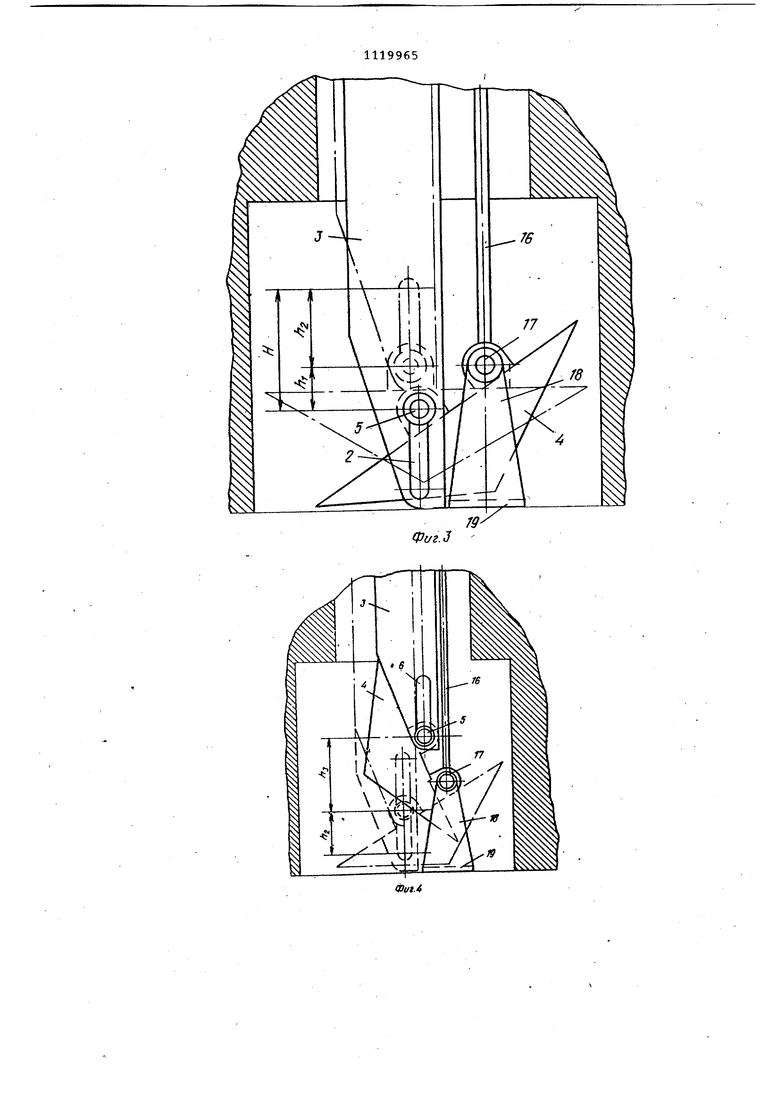
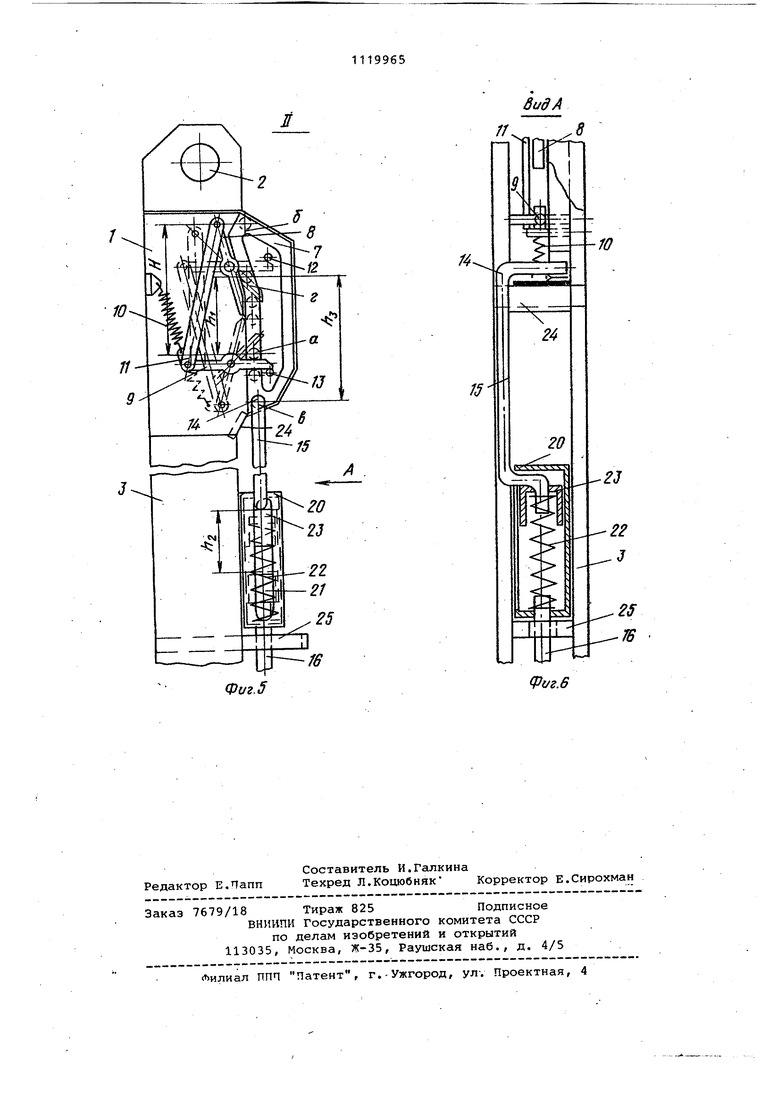
На фиг.1/изображено устройство в рабочем положении, общий вид; на фиг.2 - коромысло захватного устройства в рабочем положении (узел I на фиг.1); на фиг.З - коромысло захватного устройства при переводе из рабочего положения в нерабочееf на фиг.4 - коромысло захватного устройства в нерабочем положении; на фиг,5 - механизм фиксации коромысла в рабочем и нерабочем положениях (узел Я на фиг.1); на фиг.б - вид А на фиг,5,
Захватное устройство для изделий с отверстием содержит несущий элемент 1, навешиваемый на крюк грузоподъемного механизма посредством отверстия 2, штангу 3 с шарнирно прикрепленным к ее нижней части коромылом 4, посредством оси 5, расположеной в вертикальном пазу 6, выполненном на нижнем конце штанги 3, механизм фиксации коромысла в рабочем и нерабочем положениях, включающий в себя направляющую, образованную фигурной прорезью 7, выполненной в несущем элементе1, два рычага 8 и 9, подпружиненные посредством пружины 10 и связанные между собой тягой 11, причем для верхнего рычага предусмотрен упор 12, а для нижнего рычага 9 - упор 13. Механизм фиксации включает в себя также элемент управления механизмом фиксации, преставляющий собой палец 14, жестко прикрепленный к верхнему концу 15 тяги 16, перпендикулярно ей.
Тяга 16 шарнирно соединена посредством оси 17 с коромыслом 4 и снабжена жестко прикрепленным к ее нижнему концу опорным элементом 18, рабочая поверхность 19 которого размещена под коромыслом 4. Кроме того тяга 16 в верхней части снабжена корпусом 20 с продольным пазом 21. Внутри корпуса 20 размещена пружина 22, упирающаяся в стакан 23, с кторым связан верхний конец 15 тяги 16, изогнутый под углом 90®, палец 14 которой размещен в фигурной прорези 7.
В нижней части несущего элемента 1 выполнен скос 24 для взаимодействия с корпусом 20 подпружиненной тяги 16. Для удержания и направления подпружиненной тяги 16 относительно штанги 3, на штанге имеется хомут 25.
Работа захватного устройства осуществляется следующим образом.
Захватное устройство навешивается на крюк крана или погрузчика (на фиг,1 не показано) посредством отверстия 2 и через центральное отверстие изделия вводится внутрь до упора в пол, на котором установлено изделие, и там автоматически разворачивается в рабочее положение,
В рабочем положении кс5ромысла 4 и опорного элемента 18 (Фиг,2) подпружиненная тяга 16 своим пальцем 14 навеилена на нижнем рьзчаге 9 механизма фиксации, опираясь на него в точке а (Лиг,5).
После переноса изделия и установки его в соответствукндее место захватное устройство опускают вниз, при этом сначала в пол упирается опорный элемент 18 своей рабочей поверхностью 19, Эксцентрично расположенное относительно оси 17 коромысло 4 будет разворачиваться вниз относительно него, штанга 3, опускаясь вниз, перемест1 тся относительно подпружиненной тяги 16 сначалана вели чину Ъ,, где - расстояние, прой денное штангой 3 с места, когда коромысло 4 еще находилось в горизонтальном положении при опирании рабо чей поверхности 19 о пол, до момента, когда коромысло 4 займет наклонное положение .после разворота (фиг.З), затем на величину hj, где hj -расстояние, соответствующее длине паза 6, в целом пройдет расстояние Н, где ,+ Ь, т.е. равно расстоянию,, пройденному штангой с момента касания рабочей поверхнос ти 19 пола при горизонтальном положении коромысла 4 до момента полного опускания штанги 3 (фиг.З), Палец 14 тяги 16 по фигурной про рези 7 переместится вверх, пройдет отклонённый вниз верхний рычаг 8, который при этом не контактирует с пальцем 14 верхнегоконца 15 тяги 1 и, поднимаясь на величину Н (лиг.5) достигнет Крайнего верхнего положения в прорези 7, при этом в конце своего пути корпус 20 будет взаимодействовать со скосом 24, который отклонит в сторону палец 14 подпружиненной тяги 16 в наклонную часть прорези 7 и палец 14 окажется в то ке б (фиг.5). Далее производят подъем захватно го устройства вверх. При подъеме захватного устройстгва вверх палец 14 подпружиненной тя ти 16 из точки S сначала по наклонной части, затем по прямолинейной части фигурной прорези 7 (правая сто рона на фиг.5 ) переместится в точку в за счет разворота коромысла 4 вверх относительно оси 17 (фиг.4), при этом сначала мтанга 3 поднимается на величину hjj, затем, подтягивая вверх коромысло 4, переместится с коромыслом вверх на величину tij, где 1i3 расстояние, пройденное штан гой 3 с момента касания рабочей поверхностью 19 пола до момента касания левой плоскостью коромысла 4 пола (Фйг.4). Коромысло 4 при этом занимает нерабочее положение и при дальнейшем подъеме захва- ного устройства оно выходит из центрального отверстия изделия, не встречая препятствий. Для захвата следующего изделия захватное устройство опускают через центральное отверстие изделия вниз до упора в пол опорного элемента 18 своей рабочей поверхностью .4/. Штанга 3 при этом дальнейшем опускании вниз сначала переместится на величину 1лJ, в. это время подпружиненная тяга 16 своим пальцем 14 переместится в тоЧку -L на величину Ъ, сначала отжав вверх рычаг 9, который благодаря тяге 11 развернет в сторону верхний рычаг 8,. которым перекроется Фигурная прорезь 7. Палец.14 подпружиненной тяги 16 упрется в рычаг 8 (фиг.51 и развернет его до упора в упор 12. В дальнейшем штанга 3 будет опускаться ВНИЗ на величину Ь (Фиг.4) , палец 14 подпружиненной тяги 16 далее будет сжимать пружину 10, пока не выберет зазор Vij в продольном пазу 21 (фиг.4). Рычаг 8 удерживает в этом положении палец 14 подпружиненной тяги 16 от подъема вверх. При подъеме захватного устройства вверх палец 14 подпружиненной тяги 16 переместится из точки л, в точку а на величину tij, в это время, коромысло 4 займет рабочее положение, представленное на фиг.2, и захватное устройство готово к подъему изделия. В дальнейшем цикл повторяется. Предлагаемое захватное устройство для изделий с отверстием просто по конструкции и не требует подготовки его в«рабочее положение с использо(ванием ручного труда.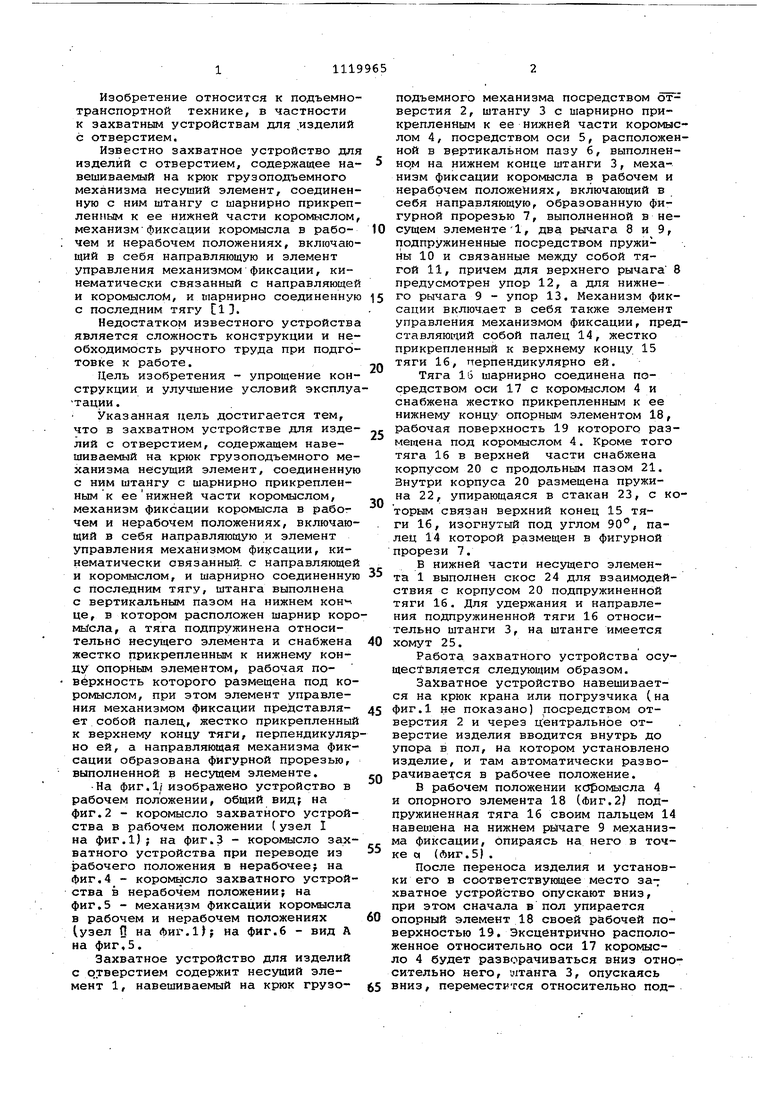
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| ПОГРУЗЧИК ФРОНТАЛЬНЫЙ БЫСТРОМОНТИРУЕМЫЙ | 2012 |
|
RU2515720C2 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| Захватное устройство | 1980 |
|
SU950657A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ | 1993 |
|
RU2072958C1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
SU1837563A1 |
ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ИЗДЕЛИЙ С ОТВЕРСТИЕМ, содержащее навешиваемый на крюк грузоподъемного механизма несущий элемент, соединенную с ним штангу с шарнирно прикрепленным к ее нижней части коромыслом, механизм фиксации коромысла в рабочем и нерабочем положениях, включающий в себя направляющую и элемент управления механизмом фиксации, кинематически связанный с направляющей и коромыслом, и шарнирно соединенную с последним тягу, отличаю- щ е е с я тем, что, с целью упрощения конструкции и улучшения условий эксплуатации, штанга выполнена с вертикальннм пазом на нижнем конце, в котором расположен шарнир коромысла, а тяга подпружинена относительно несущего элемента и снабжена жестко прикрепленным к нижнему концу опорным элементом, рабочая поверхность которого размещена под коромыслом, при этом элемент управления механиз Q мом фиксации представляет собой па е лец, жестко прикрепленный к верхне(Л му концу тяги, перпендикулярно ей, а направляющая механизма фиксации образована фигурной , выполненной в несущем элементе.
бидА
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
