Известны устройства для подъема и транспортирования грузов в цехах, содержащие передвижную по монорельсовым путям тележку, несущую рычажно-шарнирную систему типа «нюрнбергских ножниц, связанную с траверсой захватного органа, а так}ке подъемно-приводной механизм, например тельфер, грузовой блок которого связан с механизмом управления захватным органом.
Предложенное устройство для подъема и транспортирования грузов в цехах позволяет сохранять заданное положение груза в пространстве при его подъеме и транспортировании.
Это достигается тем, что рычажно-щарнирная система выполнена из ряда распололсенных во взаимно нерпендикулярных плоскостях отдельных секций, фиксирующих положение траверсы, несущей двуплечие захватные рычаги. Верхние плечи этих рычагов сочленены серьгами с расположенной над траверсой, подвижной относительно нее рамой, которая опускании грузового блока тельфера собственным весом воздействует на серьги, раскрывает захватные рычаги и удерживает их в этом .положении при посадке ее на опорную стойку, установленную на траверсе. При нодъеме грузового блока рама взаимодействует с новоротным в горизонтальной плоскости коромыслом, выполняющим роль грузового крюка посаженным на фигурную цапфу вертпкального стержня, связанного с грузовым блоком тельфера, и замыкает захватные рычаги на захват груза. Подъем груза осуществляется при подхвате рамы коромыслом.
Для автоматизации работы захват юго органа на траверсе под опорной стойкой установлена втулка с винтообразными пазами, которая при надвигании на нее коромысла разворачивает его своими пазами на 90° при каждом такте работы для поперемен)шй передачи усилия подъема на траверсу и на подвижную относительно нее раму захватного органа. Для фиксации положения коромысла в его плечи встроены подпружиненные щарики, взаимодействующие с поверхностями четырех симметричпо расположенных на фигурной цапфе впадин.
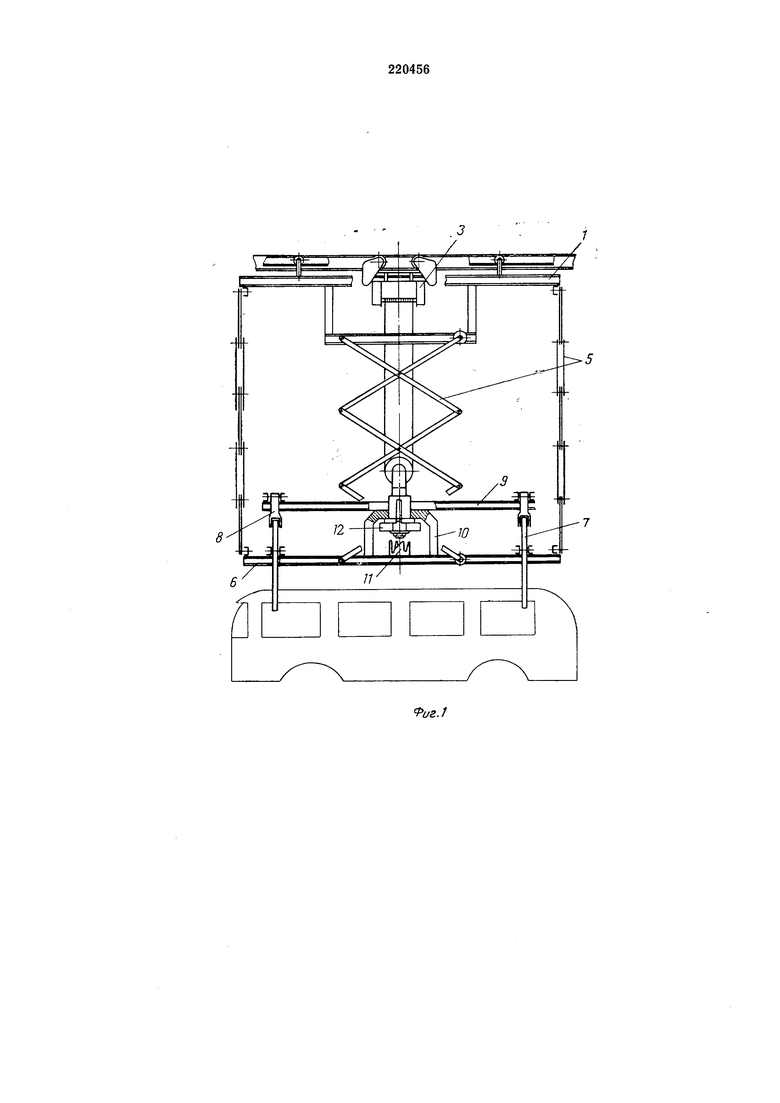
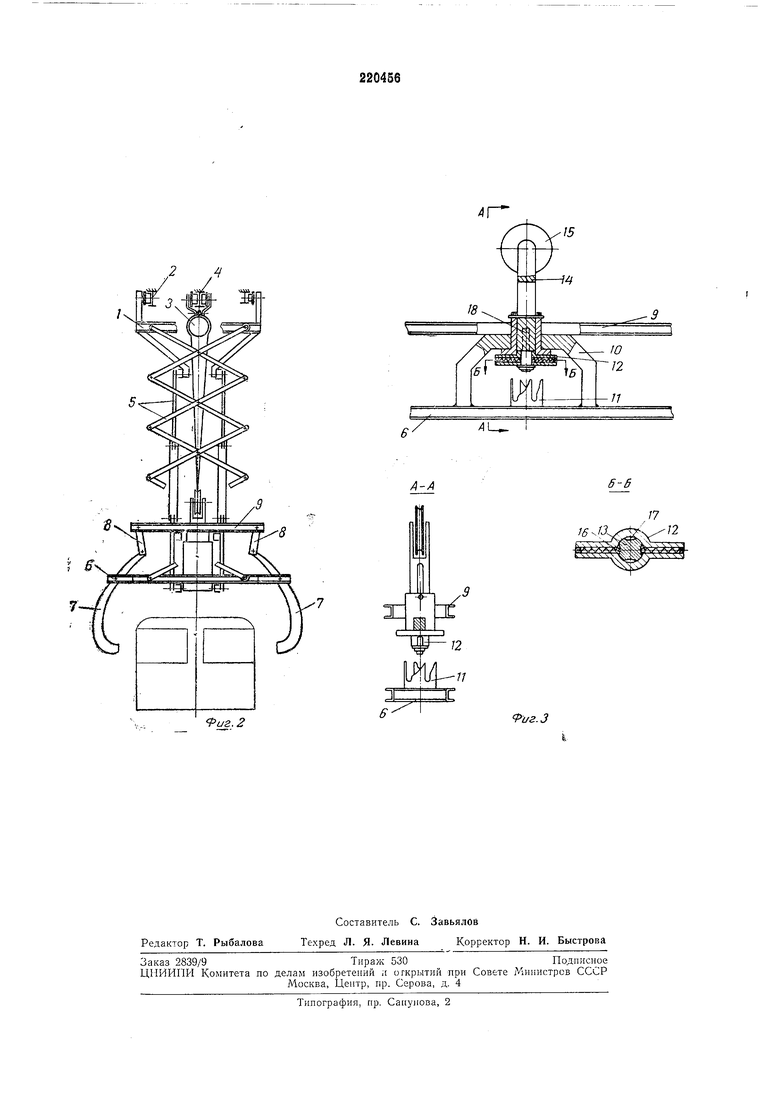
На фиг. 1 представлено описываемое устройство, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - механизм управления захватным органом и разрезы но А-А и Б-Б. Устройство содержит тележку 1, перемещающуюся по направляющим монорельсам 2. Тележка жестко связана с подъемно-приводным -механиз.мом, например тельфером 3, передвигающимся по грузовому монорельсу 4, и несет рычажно-щарнирную систему 5 типа «нюрнбергских ножниц, которая связана с траверсой 6 захватного органа.
Рычажно-шарнирная система выполнена из ряда отдельных секций, расположенных во взаимно перпендикулярных плоскостях и фиксирующих траверсу, которая несет двуплечие захватные рычаги 7. Верхние плечи рычагов серьгами 8 сочленены с рамой 9, расположенной над траверсой и выполненной подвижной относительно нее.
На траверсе установлена опорная стойка 10, под которой укреплена втулка 11с винтообразными пазами. Втулка предназначена для разворота на 90° коромысла 12, выполняющего роль грузового крюка. Этот разворот осуществляется при каждом такте работы для переменной передачи усилия подъема на траверсу и на подвижную относительно нее раму захватного органа.
Коромысло посажено на фигурную цапфу 13 вертикального стержня 14, связанного с грузовым блоком 15 тельфера. Для фиксации полол ения коромысла в плечи встроены подпружиненные щарики 16, взаимодействующие с поверхностями четырех симметрично расположенных на фигурной цапфе впадин 17.
Захватный орган опускается на изделие. При этом траверса 6, опираясь на груз, останавливается, а грузовой блок 15 со стержнем 14 продолжает движение и надвигает коромысло 12 на втулку // с винтообразными пазами. Под воздействием этих пазов коромысло разворачивается на 90° и фиксируется подпружиненными шариками 16, встроенными в плечи коромысла. Одновременно под действием собственного веса рама 9, воздействует на серьги 8, раскрывает захватные рычаги 7 и удерживает их в этом положении при посадке ее на опорную стойку 10.
При подъеме грузового блока 15 ралга 9 взаимодействует с коромыслом J2, плечи которого проходят через нрорезь 18 в опорной стойке 10, и замыкает двуплечие захватные рычаги на захват изделия. При дальнейшем подъеме происходит подъем захватного органа с изделием.
Во время перемещения устрой.ства к месту разгрузки захватный орган с изделнсм опускается и, когда изделие касается пола, траверса 6 останавливается, а рама 9 продолжает движение, раскрывая под действием собственного веса захватные рычаги 7, и удерживает их в этом положении при посадке ее на опорную стойку 10. Коромысло 12, взаимодействуя с втулкой 11, вновь разворачивается на 90° и таким образом возвращается в исходное положение. После этого происходит подъем захватного органа с раскрытыми захватными рычагами, так как коромысло захватывает траверсу за опорную стойку, не воздействуя при этом на раму. Затем устройство возвращастся в исходное положение.
Предмет изобретения
1.Устройство для подъема и транспортирования грузов в цехах, содержащее передвижную по монорельсовым путям тележку, несущую рычажно-щарнирную систему типа «нюрнбергских ножниц, связанную с траверсой захватного органа, а также подъемно-приводной механизм, например тельфер, грузовой блок которого связан с механизмом управления захватным органом, отличающееся тем, что, с целью сохранения заданного положения груза в пространстве при его подъеме
и транспортировании, рычажно-шарнирная система выполнена из ряда располол енных во взаимно перпендикулярных плоскостях отдельных секций, фиксирующих положение траверсы, несущей двуплечие захватные рычаги,
верхние плечи которых серьгами сочленены с расположенной над траверсой подвижной относительно нее рамой, которая при опускании грузового блока тельфера своим собственным весом воздействует на серьги, раскрывая при
этом захватные рычаги, и удерживает их в этом положении при посадке ее на опорную стойку, установленную на траверсе, а при подъеме грузового блока рама взаимодействует с выполняющим роль грузового крюка
поворотным в горизонтальной плоскости коромыслом, посаженным на фигурную цапфу вертикального стержня, связанного с грузовым блоком тельфера, замыкая при этом захватные рычаги на захват груза и осуществляя
подъем его при подхвате рамы коромыслом.
2.Устройство по п. 1, отличающееся тем, что, с целью автоматизации работы захватного органа, на его траверсе под опорной стойкой установлена втулка с винтообразными пазами, которая при иадвигании на нее коромысла осуществляет своими пазами разворот его на 90° при каждом такте работы для попеременной передачи усилия подъема на траверсу и подвижную относительно нее
раму захватного органа, при этом для фиксации положения коромысла в его плечи встроены подпружиненные шарики, взаимодействующие с поверхностями четырех симметрично расположенных на фигурной цапфе
впадин.
v
SH+.... f i
,
Риг. 2
6-6
A-A
иг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Саморазгружающийся контейнер | 1979 |
|
SU789336A1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Захват-кантователь для контейнеров с цапфами | 1984 |
|
SU1221178A1 |
| Грузозахватное устройство | 1990 |
|
SU1751139A1 |
| Захватная балка для маневрирования гидротехническим затвором | 1984 |
|
SU1182110A1 |
| ТРАВЕРСА РЫЧАЖНАЯ С РАЗДВИЖНЫМИ ЗАХВАТАМИ | 2015 |
|
RU2587185C1 |
| ТРАВЕРСА ПЕРЕГРУЗОЧНАЯ ЗАХВАТНАЯ ИЗДЕЛИЯ | 2012 |
|
RU2513367C1 |
| Автоматический захват для изделий с вертикальными отверстиями | 1984 |
|
SU1234342A2 |
| Устройство для перемещения вагонных тележек | 1989 |
|
SU1794735A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |