1.1
Изобретение относится к автоматике и вычислительной технике и может быть использовано в устройствах для программного управления металлорежу- щими станками.
Целью изобретения является повышение точности работы устройства.
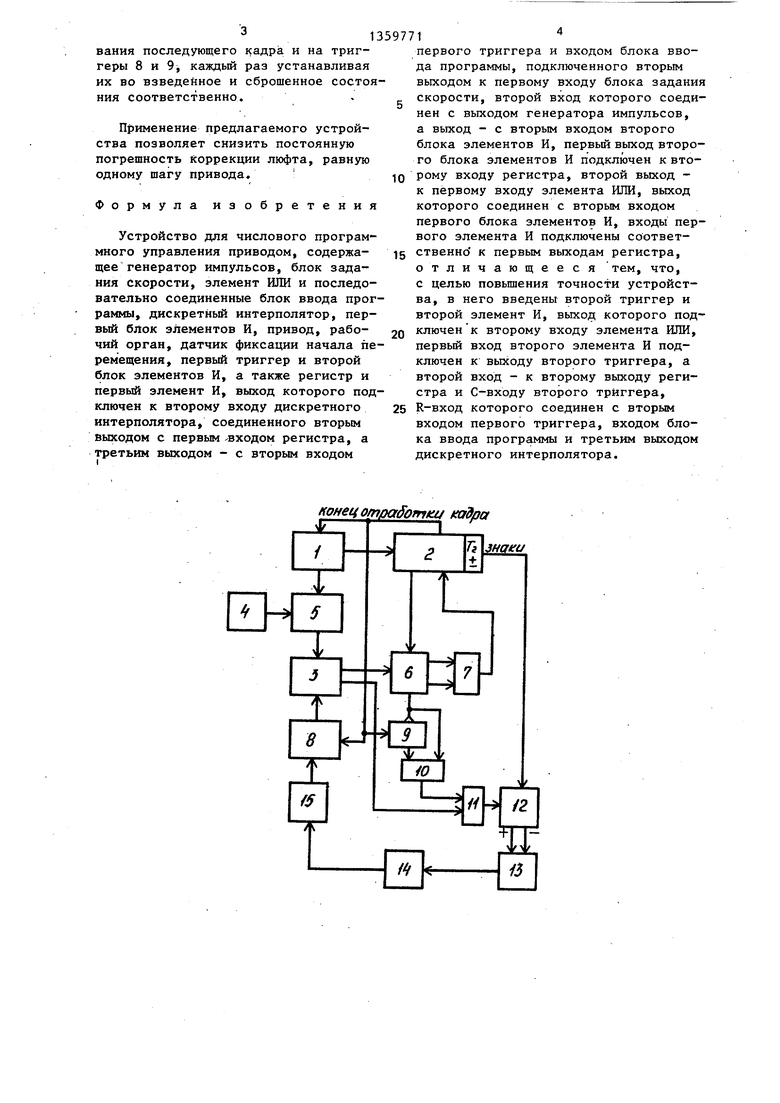
На чертеже изображена функциональная схема предлагаемого устройства.
Устройство содержит блок 1 ввода программы, дискретный интерполятор 2, второй блок элементов И 3, генератор 4 импульсов , блок 5 задания скорости, двухразрядный регистр 6, первый элемент И 7, первьй 8 и второй 9 триггеры, вторрй элемент И 10, элемент ИЛИ 11, первый блок элементов И 12, привод 13., рабочий орган 14 и датчик фиксации начала движения рабочего органа.
Устройство работает следующим образом. .
После включения схема устройства
устанавливается в исходное состояние причем триггер 8 - во взведенное состояние, а триггер 9 - в сброшенное.- Программа обработки, записанная на перфоленту и состоящая из отдельных кадров, считывается блоком Г ввода программы, с которого в двоичном код поступает на интерполятор и содержит числовую информацию о величинах, знаках и координатах перемещения, а также на блок 5 задания скорости, определяя частоту следования его выходных импульсов, соответствующую заданной скорости подачи приводов. Взведенное состояние триггера 8 разрешит поступление импульсов с блока 5 задания скорости через блок элементов И 3 на вход элемента ИЛИ 11, откуда через блок элементов И 12 в соответствии со знаком предстоящего размерного перемещения рабочего органа на отработку приводом 13 в течение времени выборки люфта до момента начала трогания рабочего органа станка. В момент трогания рабочего органа 14 датчик 15 фиксации начала движения рабочего органа станка сформирует сигнал, сбрасывающий триггер 8. Это состояние триггера 8 переключит импульсы блока 5 задания скорости со второго выхода блока элементов И 3 на первый для считывания шагов дискретного интерполятора 2 в регистре 6
Последний корректирующий импульс, который отрабатывается приводом как
первый шаг перемещения рабочего органа в процессе выборки люфта, а сле довательно, по которому датчик фиксации начала движения сформирует сигнал, сбрасывающий триггер 8, добавляется к сумме управляющих импульсов, поступающих с выхода регистра 6 в процессе реализации алгоритма интерполяции. Чтобы устранить постоянную погрешность коррекции люфта, равную одному шагу привода перемещения, не5
0
0
5
обходимо первый импульс из последовательности управляющих импульсов вычесть. Реализуется это следующим образом. В режиме интерполяции сигналы на отработку перемещений (переносы) с дискретного интерполятора 2 подаются на вход регистра 6, где накапливаются шаги, считываемые импульсами блока 5 задания скорости, которые поступают через блок элементов И 3 на вход регистра 5. Поступление первого импульса с выхода регистра на вход элемента ИЛИ 11 через элемент И 10 запрещается сбросовым состоянием триггера 9, которьй взводится по заднему фронту первого управляющего импульса (на D-вход триггера 9 постоянно подается уровень логической единицы) , в результате чего разрешается проход последующих выходных импульсов через элементы И 10 и ИЛИ 11 на вход блока элементов И 12, где в заg висимости от знаков перемещения, подаваемых в течение времени реализации алгоритма интерполяции отрабатьшаемр- го кадра с триггера знаков интерполятора 2 на блок элементов И 12, они
0 распределяются по вьгходам + или
- и поступают на соответствующие . входы привода 13, который производит перемещение рабочего органа станка в одном или в другом направлении.
Выходная частота интерполятЬра 2 значительно вьш1е программной. Перевод работы интерполятора 2 в истинный масштаб времени осуществляется с помощью элемента И 7, на котором вы-, рабатывается сигнал, блокирующий интерполятор 2 при наполнении двухразрядным регистром 6 двух единиц. Интерполятор ждет импульс с выхода
5
0
25
55
блока 5 задания скорости, считывающего один импульс из регистра 6.
По окончании отработки кадра ин- .терполятором 2 формируется сигнал Конец отработки кадра и подается на блок 1 ввода программы для считы- 135
вания последующего кадра и на триггеры 8 и 9 каждый раз устанавливая их во взведейное и сброшенное состояния соответственно..
Применение предлагаемого устройства позволяет снизить постоянную погрешность коррекции люфта, равную одному шагу привода,
Формула изобретения
Устройство для числового программного управления приводом, содержа- щее генератор импульсов, блок задания скорости, элемент ИЛИ и последовательно соединенные блок ввода программы, дискретный интерполятор, первый блок элементов И, привод, рабо- чий орган, датчик фиксации начала перемещения, первый триггер и второй блок элементов И, а также регистр и первый элемент И, выход которого подключен к второму входу дискретного интерполятора, соединенного вторым выходом с первым-входом регистра, а третьим выходом - с вторым входом
/foffeif отработки кадра
1
первого триггера и входом блока ввода программы, подключенного вторым выходом к первому входу блока задания скорости, второй вход которого соединен с выходом генератора импульсов, а выход - с вторым входом второго блока элементов И, первый выход второго блока элементов И подключен к второму входу регистра, второй выход - к первому входу элемента ИЛИ, выход которого соединен с вторым входом первого блока элементов И, входы первого элемента И подключены соответственно к первым выходам регистра, отличающееся тем, что, с целью повьш1ения точности устройства, в него введены второй триггер и второй элемент И, выход которого подключен к второму входу элемента ИЛИ, первый вход второго элемента И подключен к выходу второго триггера, а второй вход - к второму выходу регистра и С-входу второго триггера, R-вход которого соединен с вторым входом первого триггера, входом блока ввода программы и третьим выходом дискретного интерполятора.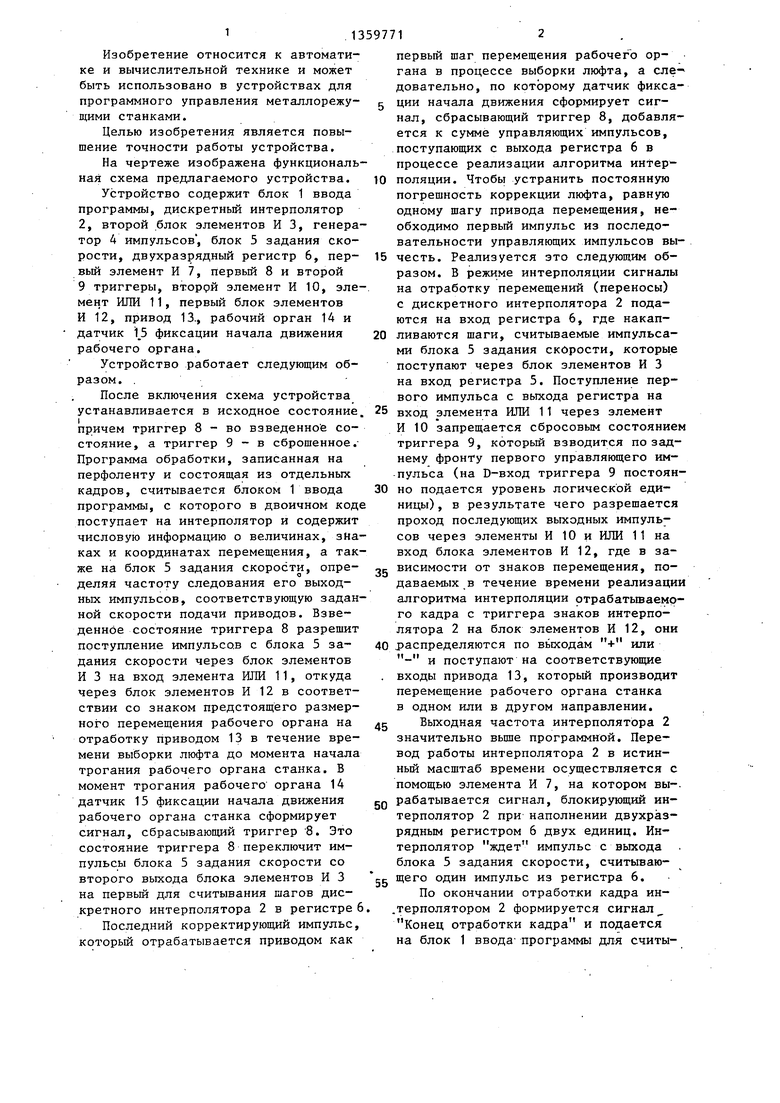
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для числового программного управления приводом | 1984 |
|
SU1242916A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| Устройство для числового программного управления | 1989 |
|
SU1737410A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Интерполятор с самоконтролем | 1990 |
|
SU1777122A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Устройство для программного управления | 1985 |
|
SU1275373A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Устройство для задания программы | 1979 |
|
SU862118A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в устройствах для программного управления металлорежущими станками. Целью изобретения является повышение точности работы устройства. Устройство содержит блок ввода программы, дискретный интерполятор, .блоки элементов И, генератор импульсов, блок задания скорости, двухразрядньй регистр, первый элемент И, триггеры, элементы И, ИЛИ, привод, рабочий орган, датчик фиксации начала движения рабочего органа. В данном устройстве для числового програм - много управления приводом возможно устранить недостаточную точность устройства путем вычитания первого импульса КЗ последовательности управляющих импульсов, что позволит снизить постоянную погрешность коррекции люфта, равную одному шагу привода. 1 ил. i (Л 00 ел со 
| Авторское св,идетельство СССР № 1124251, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для числового программного управления приводом | 1984 |
|
SU1242916A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
