2.Устройство по п. 1, отличающееся тем, что каретка дополнительно имеет симметрично расположенные относительно планки рычаги, соединенные посредством распорных болтов с соответствующими рычагами, несущими оправки.
3.Устройство по п. 1, отличающееся тем, что каретка имеет призматические пазы для подвижных стопорных болтов с роликами.
4.Устройство по пп. 1 и 3, отличающееся тем, что шпулярник имеет с обеих сторон оправки и выполнен подвижным.
5.Устройство по пп. I-4, отличающееся тем, что оно имеет два ряда кареток с толкателями и размещенный между каретками ряд щпулярников, при этом каретки и шпулярники смонтировань на рельсах.
6.Устройство по пп. 1, 3 и 4, отличающееся тем, что оно имеет систему управления, включающую силовые цилиндры.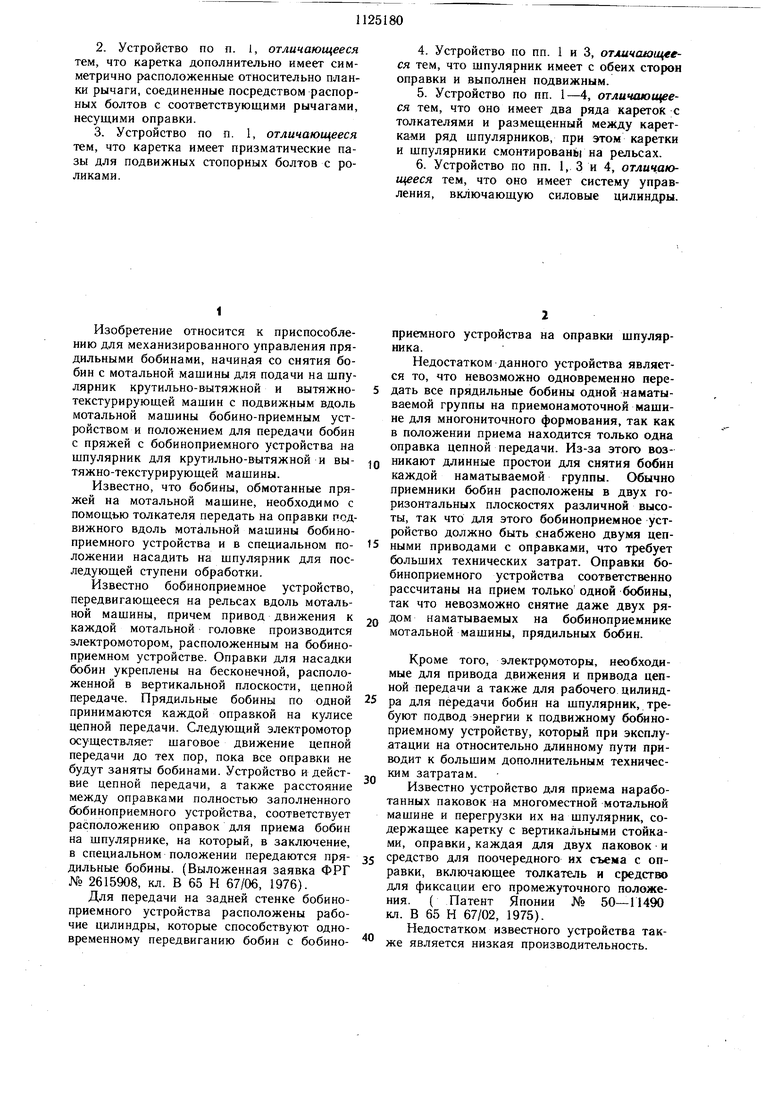
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпулярник для крутильно-вытяжных и им подобных машин | 1974 |
|
SU487171A1 |
| Механизированный шпулярник для крутильно-вытяжных и подобных машин | 1972 |
|
SU440455A1 |
| Устройство для намотки тел вращенияиз АРМиРОВАННыХ плАСТиКОВ | 1978 |
|
SU804489A1 |
| Устройство для установки бобин на крутильно-вытяжных машинах синтетических волокон | 1961 |
|
SU151246A1 |
| ПОДОБНЫХ МАШИН | 1973 |
|
SU397569A1 |
| Полуавтоматическая линия для производства стеклопластиковых изделий методом намотки | 1975 |
|
SU729075A1 |
| Крутильно-вытяжная машина для полиамидных волокон | 1957 |
|
SU114524A1 |
| Устройство для намотки нити | 1980 |
|
SU895869A1 |
| Намоточная машина | 1981 |
|
SU988731A1 |
| Устройство для перезаправки шпулярника сновальных машин | 1982 |
|
SU1066927A1 |
1. УСТРОЙСТВО ДЛЯ ПРИЕМА НАРАБОТАННЫХ ПАКОВОК НА МНОГОМЕСТНОЙ МОТАЛЬНОЙ МАШИНЕ И ПЕРЕГРУЗКИ ИХ НА ШПУЛЯРНИК, содержащее каретку с вертикальными стойка ми, оправки, каждая для двух паковок, и средство для поочередного их съема с оправки, имеющее толкатель и средство для фиксации его промежуточного положении, отличающееся тем, 4to каретка имеет смонтированную на вертикальных стойках горизонтальную планку и две пары рычагов, каждая из которых имеет последовательно смонтированные на планке двуплечий и одноплечий рычаги, при этом одно из плеч двуплечего рычага шарнирно связано с одноплечим рычагом, а оправки установлены на свободных концах рычагов, причем каждый двуплечий рычаг имеет горизонтальную направляющую и установленный в ней подпружиненный стержень с фиксатором его положения и с рукояткой управления положением рычагов. (Л to 01 00
1
Изобретение относится к приспособлению для механизированного управления прядильными бобинами, начиная со снятия бобин с мотальной мащины для подачи на щпулярник крутильно-вытяжной и вытяжнотекстурирующей машин с подвижным вдоль мотальной мащины бобино-приемным устройством и положением для передачи бобин с пряжей с бобиноприемного устройства на щпулярник для крутильно-вытяжной и вытяжно-текстурирующей мащины.
Известно, что бобины, обмотанные пряжей на мотальной машине, необходимо с помощью толкателя передать на оправки подвижного вдоль мотальной машины бобиноприемного устройства и в специальном положении насадить на щпулярник для последующей ступени обработки.
Известно бобиноприемное устройство, передвигающееся на рельсах вдоль мотальной мащины, причем привод движения к каждой мотальной головке производится электромотором, расположенным на бобиноприемном устройстве. Оправки для насадки бобин укреплены на бесконечной, расположенной в вертикальной плоскости, цепной передаче. Прядильные бобины по одной принимаются каждой оправкой на кулисе цепной передачи. Следующий электромотор осуществляет щаговое движение цепной передачи до тех пор, пока все оправки не будут заняты бобинами. Устройство и действие цепной передачи, а также расстояние между оправками полностью заполненного бобиноприемного устройства, соответствует расположению оправок для приема бобин на шпулярнике, на который, в заключение, в специальном положении передаются прядильные бобины. (Выложенная заявка ФРГ № 2615908, кл. В 65 Н 67/06, 1976).
Для передачи на задней стенке бобиноприемного устройства расположены рабочие цилиндры, которые способствуют одновременному передвиганию бобин с бобиноприемного устройства на оправки щпулярннка.
Недостатком данного устройства является то, что невозможно одновременно передать все прядильные бобины одной наматываемой группы на приемонамоточной мащине для многониточного формования, так как в положении приема находится только одна оправка цепной передачи. Из-за этого воз0 никают длинные простои для снятия бобин каждой наматываемой группы. Обычно приемники бобин расположены в двух горизонтальных плоскостях различной высоты, так что для этого бобиноприемное устройство должно быть снабжено двумя цеп5 ными приводами с оправками, что требует больщих технических затрат. Оправки бобиноприемного устройства соответственно рассчитаны на прием только одной бобины, так что невозможно снятие даже двух ряQ дом наматываемых на бобиноприемнике мотальной машины, прядильных бобин.
Кроме того, электромоторы, необходимые для привода движения и привода цепной передачи а также для рабочего цилинд5 ра для передачи бобин на щпулярник, требуют подвод энергии к подвижному бобиноприемному устройству, который при эксплуатации на относительно длинному пути приводит к больщим дополнительным техническим затратам.
Известно устройство для приема наработанных паковок на многоместной мотальной машине и перегрузки их на щпулярник, содержащее каретку с вертикальными стойками, оправки, каждая для двух паковок и 5 средство для поочередного их съема с оправки, включающее толкатель и средство для фиксации его промежуточного положения. ( Патент Японии № 50-11490 кл. В 65 Н 67/02, 1975).
Недостатком известного устройства также является низкая производительность.
Целью изобретения является достижение одновременного приема всех прядильных бобин одной наматываемой группы мотальной машины подвижным бобиноприемным устройством, обеспечение перехода от двойного расположения бобнн на отдельных бобиноприемниках мотальной машины к простому расположению на оправках шпулярника для крутильно-вытяжной и вытяжнотекстурирующей машин и отказ от подвода энергии к передвижному бобиноприемному устройству.
В основу изобретения положена задача создать бобиноприемное устройство, обслуживаемое и передвигаемое вручную, оправки которого так изменяют свое положение, что при приеме бобин они полностью соответствуют положению бобиноприемников наматываемой группы мотальной машины и при отдаче - положению оправок на шпулярнике, причем в положении передачи реализуется перемешение, обеспечиваюш,ее переход от двойного расположения бобин на оправках бобиноприемного устройства к простому расположению бобин на оправках шпулярника для крутильно-вытяжной и вытяжно-текстурирующей машин.
Указанная цель достигается тем, что в устройстве для приема наработанных паковок на многоместной мотальной машине и перегрузки их на шпулярник, содержащем каретку с вертикальными стойками, оправки, каждая для двух паковок и средство для поочередного их съема с оправки, имеюшее толкатель и средство для- фиксации его промежуточного положения, каретка имеет смонтированную на вертикальных стойках горизонтальную планку и две пары рычагов, каждая из которых имеет последовательно смонтированные на планке двуплечий и одноплечий рычаги, при этом одно из плеч двуплечего рычага шарннрно связано с одноплечим рычагом, а Оправки установ лены на свободных концах рычагов, причем каждый двуплечий рычаг имеет горизонтальную направляюш,ую и установленный в ней подпружиненный стержень с фиксатором его положений и с рукояткой управления положением рычагов.
Каретка дополнительно имеет симметрично расположенные относительно планки рычаги, соединенные посредством распорных болтов с соответствующими рычагами несущими оправки.
Каретка имеет призматические пазы для подвижных стопорных болтов с роликами.
Шпулярник имеет с обеих сторон оправки и выполнен подвижным.
Устройство имеет два ряда кареток с толкателями и размещенный между каретками ряд шпулярников, при этом каретки и шпулярники смонтированы на рельсах.
Устройство имеет систему управления, включающую силовые цилиндры.
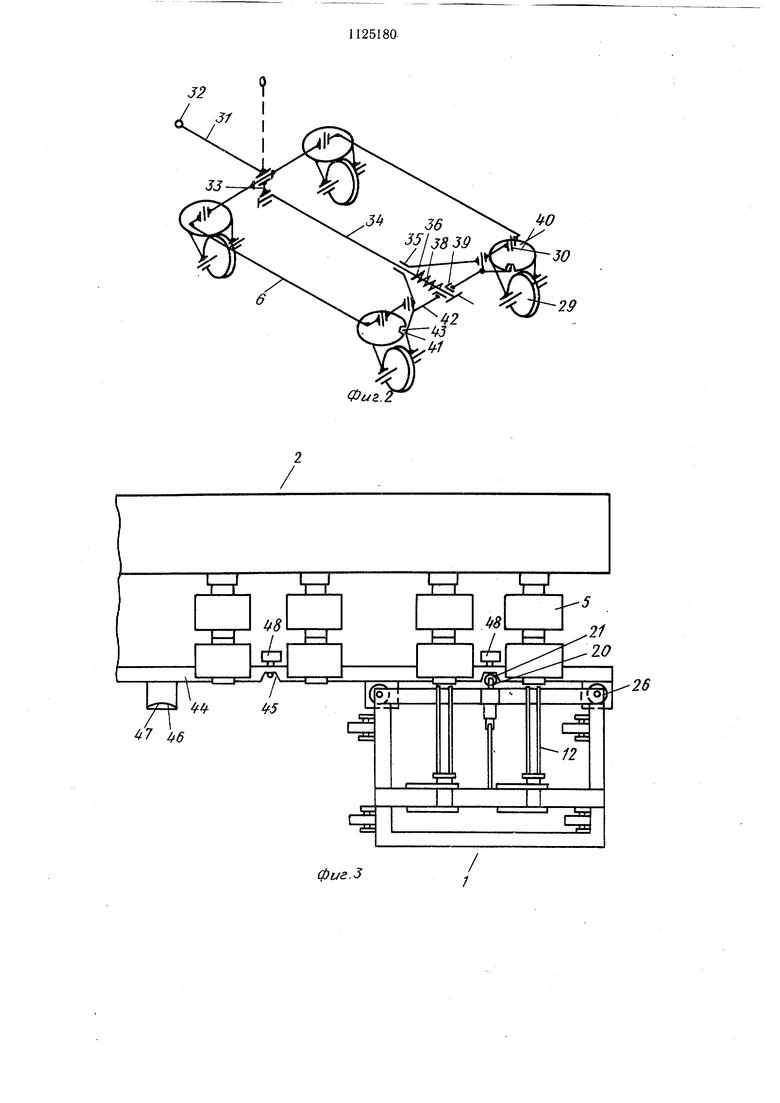
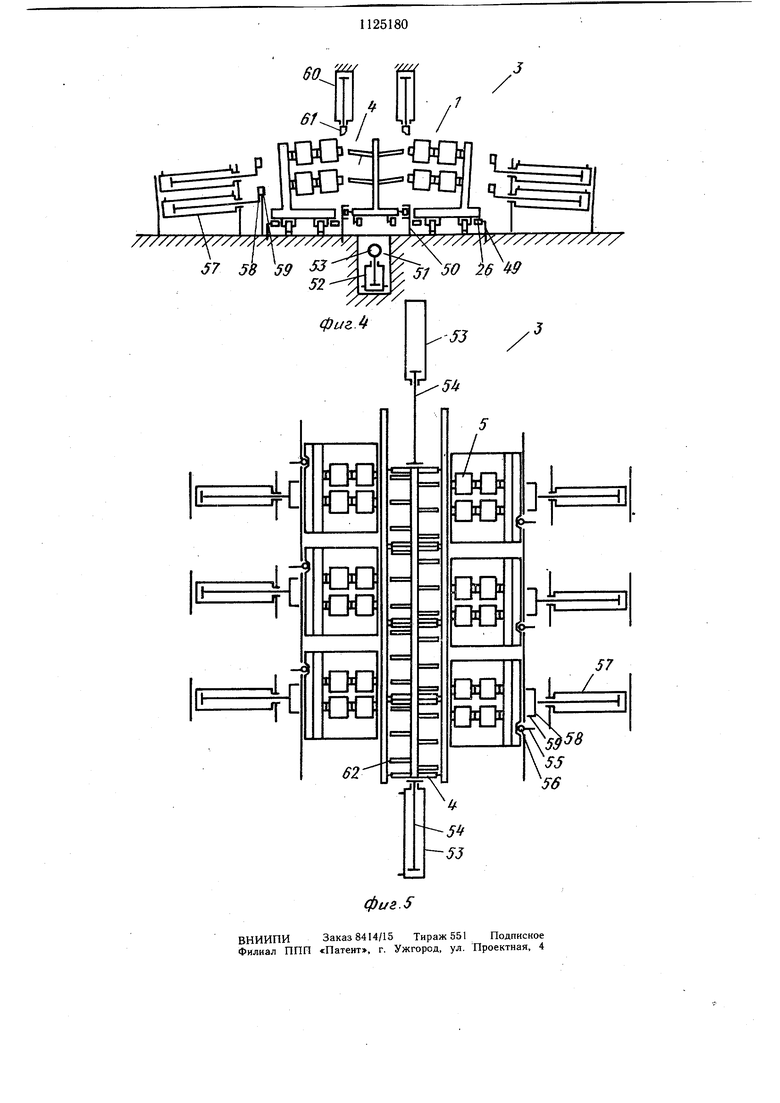
На фиг. 1 показана каретка с важнейшими функциональными элементами; перспективный вид; на фиг. 2 - ходовой механизм каретки, схематический вид; на фиг. 3план мотальной машины с подведенной кареткой для замены паковок; на фиг. 4 - вид места передачи перед передачей паковок с кареток на шпулярники, на фиг. 5 план места передачи перед передаче.й паковок.
0 Устройство содержит каретку 1 для приема восьми паковок, которые одновременно наматываются на мотальной машине (фиг. 1). На станине 6 закреплена несущая планка 7, на которой установлены четыре
одноплечих-рычага 8 и четыре двуплечих рычага 9. Распорными болтами 10 каждые два однородные рычага жестко соединены друг с другом, так что образуются две пары двуплечих и две пары одноплечих рычагов. Связями 11 соответственно однопле0 чий рычаг 8 соединен с одним двуплечим рычагом 9. На рычагах 8 и 9, на одинаковом расстоянии от точки поворота установлены оправки 12 для приема паковок 5. На двух двуплечих рычагах 9 расположена на5 правляющая деталь 13, которая поворачивается вокруг своей горизонтальной оси. В этих направляющих деталях поворотно расположен стержень 14 управления. На стержне 14 управления с обеих сторон направляющих деталей 13 размещены установочные
0 кольца 15. Таким образом, стержень 14 управления связывает обе пары двуплечих рычагов. На стержне 14 управления укреплен рычаг 16. На несущей планке 7 расположен стопорный лист 17, который имеет два паза, в которые входит рычаг 16. Пру5 жиной 18 стержень 14 управления получает вращательный момент, который давит рычаг 16 в один из пазов стопорного листа 17. На станине 6 закреплен подшипник 19, в котором подвижно расположен стопорный
0 болт 20 с роликом 21. Нажимная пружина в подшипнике 19 (не показана) выдвигает в горизонтальном направлении стопорный болт 20 с роликом 21. На стопорном болте 20 закреплена тяга 22, которая своим другим концом шарнирно соединена с коленча тьш рычагом 23, расположенным на станине 6. Двуплечий рычаг 9 имеет плечо 24. Тяга 25 одним концом закреплена на плече 24 и другим концом - на коленчатом рычаге 23. На станине 6 расположены четыре
0 направляющих ролика 26, которые поворачиваются вокруг своей вертикальной оси. Станина 6 оснащена призматическим пазом 27 для позиционирования в месте передачи 3. Закрепленный на станине 6 тяговый крюк 28 служит для присоединения следую5 щей каретки.
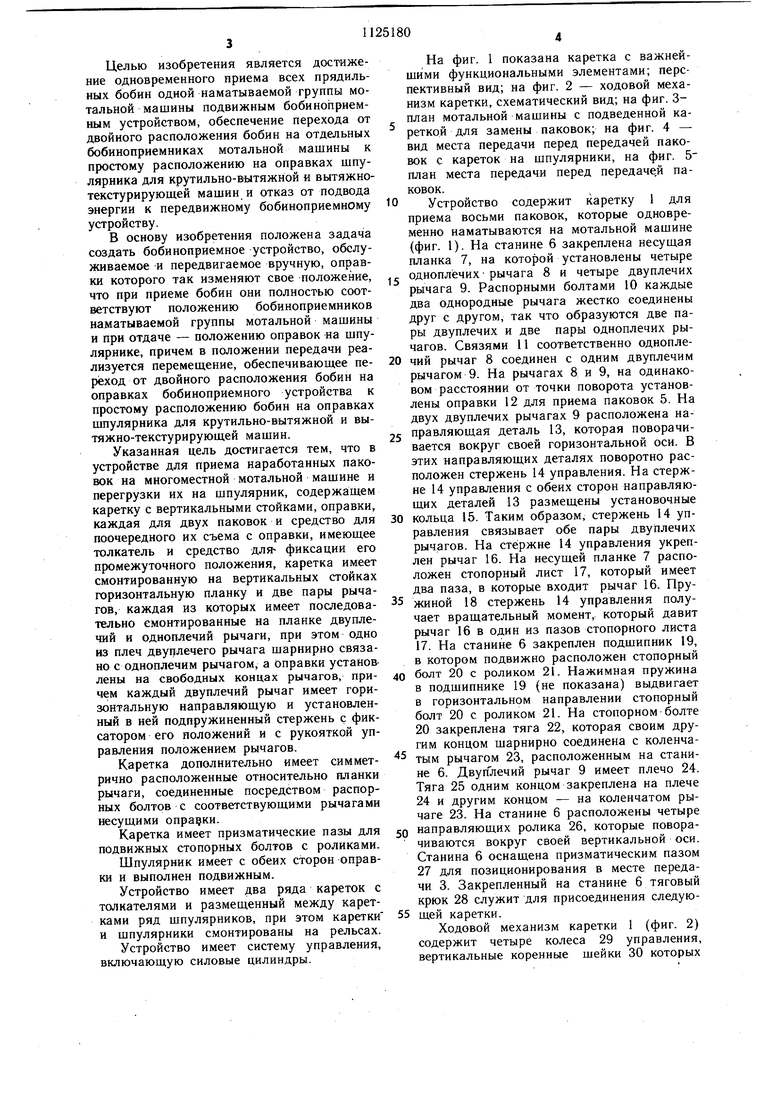
Ходовой механизм каретки 1 (фиг. 2) содержит четыре колеса 29 управления, вертикальные коренные шейки 30 которых
проведены в станину 6. Тяга 31 в виде коленчатого рычага с ушком 32 расположена на станине 6. Она касается в вертикальной плоскости и зацепляется в верхнем положении. На плече 33 тяги 31 закреплен стержень 34, который через подшипник 35 проведен в станину 6. На стержне 34 закреплены передний диск 36 и задний диск 37. Между этими дисками расположены нажимная пружина 38 и передвижная втулка 39. На опорных шейках 30 обоих колес 29 управления, которые лежат напротив тяги 31, закреплено по одному диску 40 с пазом 41. На станине 6 расположены два стопорные рычага 42. с защелками 43. Концы стопорных рычагов 42, лежащие напротив защелок 43, расположены на тяге 34 между передвижной втулкой 39 и задним диско.м 37. При спущенной тяге 31 защелки 43 стопорных рычагов 42 зацепляются нажимной пружиной 38 за паз 41 дисков 40, в то время как в верхнем положении тяги 31 они расцепляются задним диском 37.
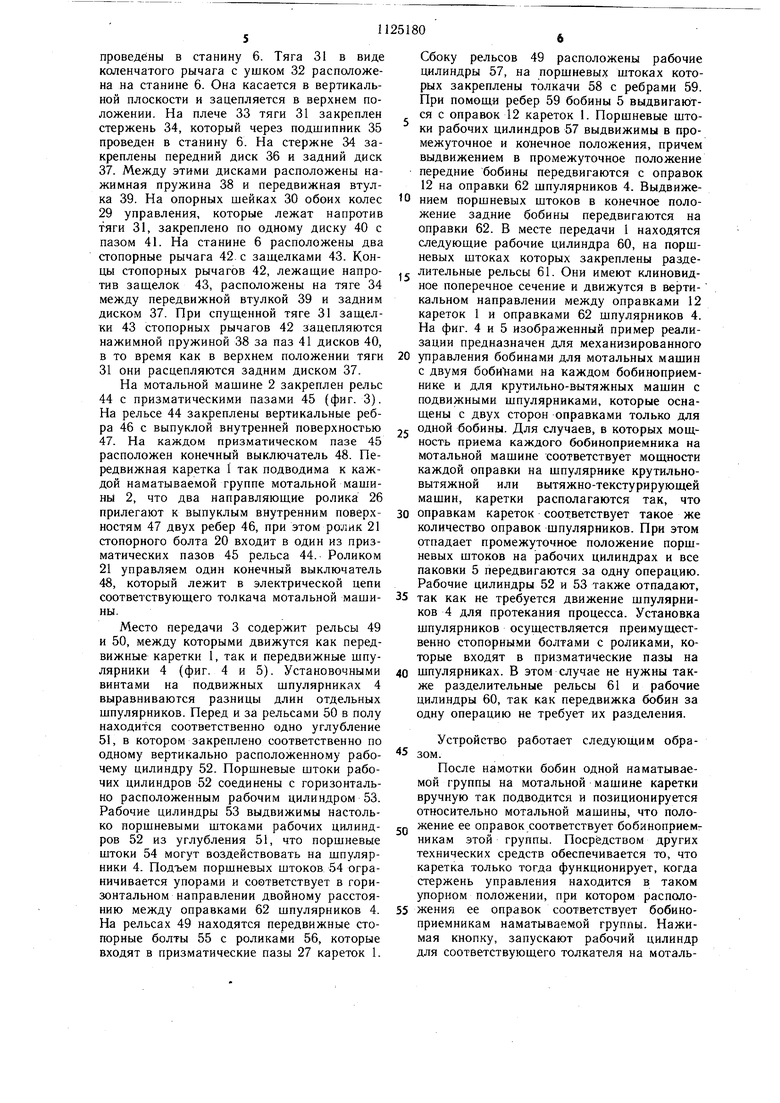
На мотальной мащине 2 закреплен рельс 44 с призматическими пазами 45 (фиг. 3). На рельсе 44 закреплены вертикальные ребра 46 с выпуклой внутренней поверхностью
48,который лежит в электрической цепи соответствующего толкача мотальной машины.
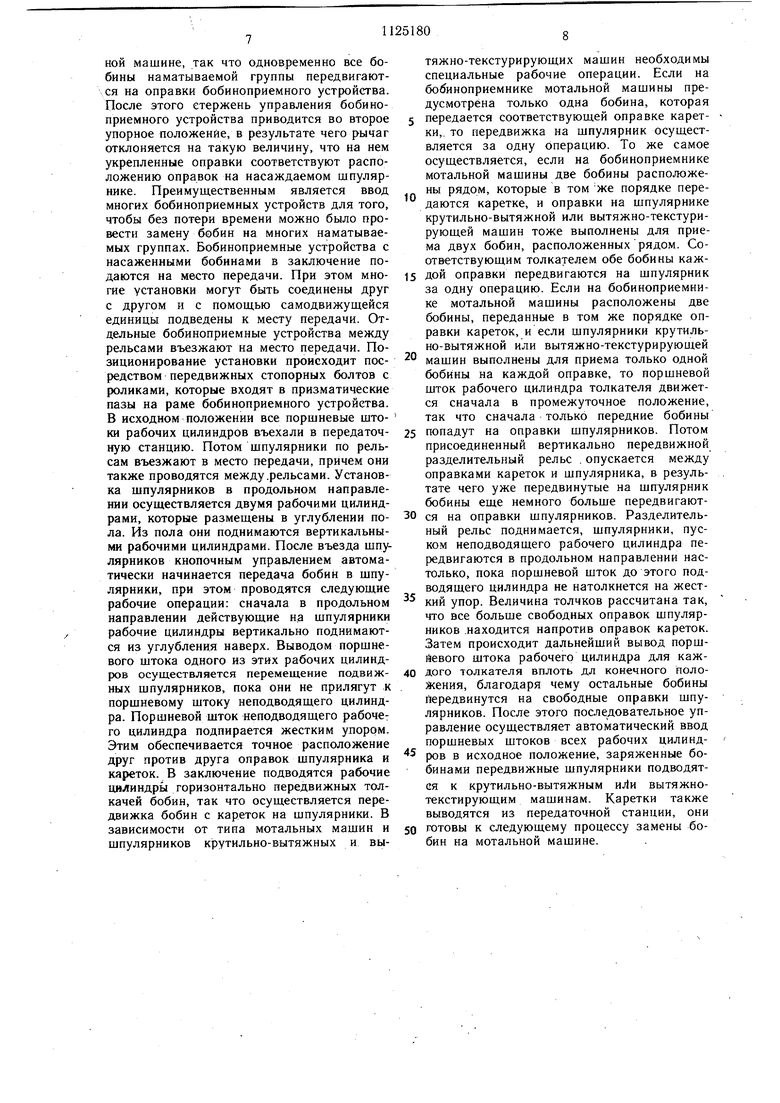
Место передачи 3 содержит рельсы 49 и 50, между которыми движутся как передвижные каретки 1, так и передвижные шпулярники 4 (фиг. 4 и 5). Установочными винтами на подвижных шпулярниках 4 выравниваются разницы длин отдельных шпулярников. Перед и за рельсами 50 в полу находится соответственно одно углубление 51, в котором закреплено соответственно по одному вертикально расположенному рабочему цилиндру 52. Поршневые штоки рабочих цилиндров 52 соединены с горизонтально расположенным рабочим цилиндром 53. Рабочие цилиндры 53 выдвижимы настолько поршневыми штоками рабочих цилиндров 52 из углубления 51, что поршневые штоки 54 могут воздействовать на шпулярники 4. Подъем поршневых штоков 54 ограничивается упорами и соответствует в горизонтальном направлении двойному расстоянию между оправками 62 шпулярников 4. На рельсах 49 находятся передвижные стопорные болты 55 с роликами 56, которые входят в призматические пазы 27 кареток 1.
Сбоку рельсов 49 расположены рабочие цилиндры 57, на поршневых штоках которых закреплены толкачи 58 с ребрами 59. При помощи ребер 59 бобины 5 выдвигаются с оправок 12 кареток 1. Поршневые штоки рабочих цилиндров 57 выдвижимы в промежуточное и конечное положения, причем выдвижением в промежуточное положение передние бобины передвигаются с оправок 12 на оправки 62 шпулярников 4. Выдвижением поршневых штоков в конечное положение задние бобины передвигаются на оправки 62. В месте передачи 1 находятся следующие рабочие цилиндра 60, на поршневых штоках которых закреплены разделительные рельсы 61. Они имеют клиновидное поперечное сечение и движутся в вертикальном направлении между оправками 12 кареток 1 и оправками 62 шпулярников 4. На фиг. 4 и 5 изображенный пример реализации предназначен для механизированного
управления бобинами для мотальных машин с двумя бобинами на каждом бобиноприемнике и для крутильно-вытяжных машин с подвижными шпулярниками, которые оснащены с двух сторон оправками только для
одной бобины. Для случаев, в которых мощность приема каждого бобиноприемника на мотальной машине соответствует мощности каждой оправки на шпулярнике крутильновытяжной или вытяжно-текстурирующей машин, каретки располагаются так, что
оправкам кареток соответствует такое же количество оправок щпулярников. При этом отпадает промежуточное положение поршневых штоков на рабочих цилиндрах и все паковки 5 передвигаются за одну операцию. Рабочие цилиндры 52 и 53 также отпадают,
так как не требуется движение шпулярников 4 для протекания процесса. Установка шпулярников осуществляется преимущественно стопорными болтами с роликами, которые входят в призматические пазы на
шпулярниках. В этом случае не нужны также разделительные рельсы 61 и рабочие цилиндры 60, так как передвижка бобин за одну операцию не требует их разделения.
Устройство работает следующим образом.
После намотки бобин одной наматываемой группы на мотальной машине каретки вручную так подводится и позиционируется относительно мотальной машины, что положение ее оправок соответствует бобиноприемникам этой группы. Посредством других технических средств обеспечивается то, что каретка только тогда функционирует, когда стержень управления находится в таком упорном положении, при котором расположения ее оправок соответствует бобиноприемникам наматываемой группы. Нажимая кнопку, запускают рабочий цилиндр для соответствующего толкателя на мотальной машине, так что одновременно все бобины наматываемой группы передвигаются на оправки бобиноприемного устройства. После этого стержень управления бобиноприемного устройства приводится во второе упорное положение, в результате чего рычаг отклоняется на такую величину, что на нем укрепленные оправки соответствуют расположению оправок на насаждаемом шпулярнике. Преимущественным является ввод многих бобиноприемных устройств для того, чтобы без потери времени можно было провести замену бобин на многих наматываемых группах. Бобиноприемные устройства с насаженными бобинами в заключение подаются иа место передачи. При этом многие установки могут быть соединены друг с другом и с помощью самодвижущейся единицы подведены к месту передачи. Отдельные бобиноприемные устройства между рельсами въезжают на место передачи. Позиционирование установки происходит посредством передвижных стопорных болтов с роликами, которые входят в призматические пазы на раме бобиноприемного устройства. В исходном положении все порщневые щтоки рабочих цилиндров въехали в передаточную станцию. Потом щпулярники по рельсам въезжают в место передачи, причем они также проводятся между .рельсами. Установка шпулярников в продольном направлении осуществляется двумя рабочими цилиндрами, которые размещены в углублении пола. Из пола они поднимаются вертикальными рабочими цилиндрами. После въезда шпулярников кнопочным управлением автоматически начинается передача бобин в щпулярники, при этом проводятся следующие рабочие операции: сначала в продольном направленин действующие н.а шпулярники рабочие цилиндры вертикально поднимаются из углубления наверх. Выводом поршневого штока одного из этих рабочих цилиндров осуществляется перемещение подвижных щпулярников, пока они не прилягут к порщневому щтоку неподводящего цилиндра. Поршневой щток неподводящего рабоче: го цилиндра подпирается жестким упором. Этим обеспечивается точное расположение друг против друга оправок шпулярника и кареток. В заключение подводятся рабочие цилиндры горизонтально передвижных толкачей бобин, так что осуществляется передвижка бобин с кареток на шпулярники. В зависимости от типа мотальных мащин и щпулярников крутильно-вытяжных и вытяжно-текстурирующих машин необходимы специальные рабочие операции. Если на бобиноприемнике мотальной машины предусмотрена только одна бобина, которая 5 передается соответствующей оправке карет- ки,. то передвижка на шпулярник осуществляется за одну операцию. То же самое осуществляется, если на бобиноприемнике мотальной машины две бобины расположены рядом, которые в том же порядке передаются каретке, и оправки на шпулярнике крутильно-вытяжной или вытяжно-текстурирующей мащин тоже выполнены для приема двух бобин, расположенных рядом. Соответствующим толкателем обе бобины каж5 дой оправки передвигаются на шпулярник за одну операцию. Если на бобиноприемнике мотальной машины расположены две бобины, переданные в том же порядке оправки кареток, и если щпулярники крутильно-вытяжной или вытяжно-текстурирующей
0 машин выполнены для приема только одной бобины на каждой оправке, то поршневой шток рабочего цилиндра толкателя движется сначала в промежуточное положение, так что сначала только передние бобины
5 попадут на оправки шпулярников. Потом присоединенный вертикально передвижной разделительный рельс . опускается между оправками кареток и шпулярника, в резуль- . тате чего уже передвинутые на шпулярник бобины еще немного больще передвигают0 ся на оправки шпулярников. Разделительный рельс поднимается, шпулярники, пуском неподводяшего рабочего цилиндра передвигаются в продольном направлении настолько, пока поршневой шток до этого подводящего цилиндра не натолкнется на жест кий упор. Величина толчков рассчитана так, что все больше свободных оправок шпулярников .находится напротив оправок кареток. Затем происходит дальнейший вывод порщйевого щтока рабочего цилиндра для каж0 дого толкателя вплоть дл конечного положения, благодаря чему остальные бобины йередвинутся на свободные оправки шпулярников. После этого последовательное управление осуществляет автоматический ввод поршневых штоков всех рабочих цилинд ров в исходное положение, заряженные бобинами передвижные шпулярники подводятся к крутильно-вытяжным иЛи вытяжнотекстирующим машинам. Каретки также выводятся из передаточной станции, они
0 готовы к следующему процессу замены бобин на мотальной машине.
0
Фиг..
