Изобретение относится к машиностроению и может быть использовано в конструкциях промышленных роботов, манипуляторов и механических рук.
Известен захват манипулятора, содержащий корпус, привод и шарвирно-рычажные механизмы, жестко соединенные с зажимными губками 1.
Недостатками известного захвата является невозможность регулировки степени прижатия клещевых губок, регулировки величины хода, невозможность трансформироваться в другой рабочий орган, например в вакуумный захват, что снижает его технологические возможности.
Цель изобретения - расширение технологических возможностей захвата за счет регулирования величины хода и силы сжатия каждой губки.
Поставленная цель достигается тем, что захват манипулятора, содержащий корпус, привод и шарнирно-рычажные механизмы, жестко соединенные с зажимными губками, снабжен установленной в корпусе штангой с винтами и скалками, а привод выполнен в виде пневматических присосок, шарнирно установленных на скалках, соединенных с возможностью осевого перемещения с шарнирно-рычажными механизмами и с возможностью взаимодействия со штангой с винтами.
Кроме того, захват снабжен расположенным в корпусе приспособлением для переналадки, выполненным в виде закрепленного на оси зажима, установочная поверхность которого выполнена по форме рабочих поверхностей зажимных губок.
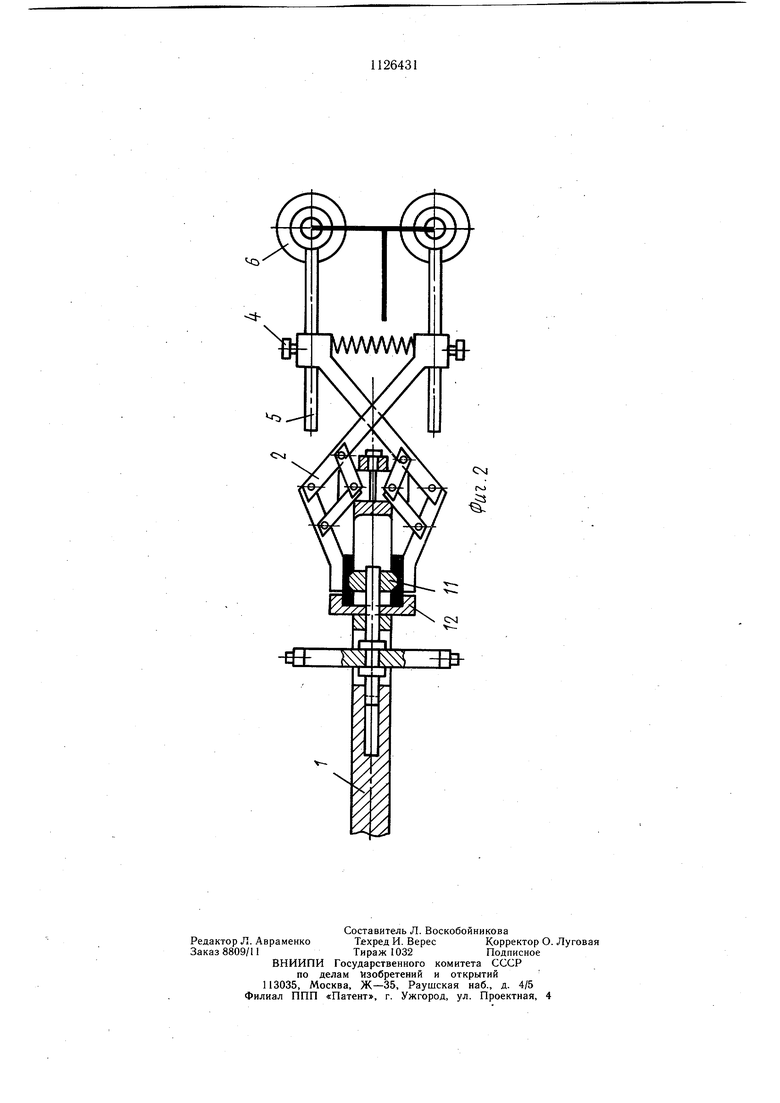
На фиг. 1 изображен захват, разрез; на фиг. 2 - захват, переналаженный на пневматический.
Захват манипулятора содержит корпус 1, на котором закреплен шарнйрно-рычажный механизм 2 с зажимными губками 3. Ша знирно-рычажный механизм 2 смонтирован с возможностью осевого перемешения и фиксации посредством винтов 4 на скалках 5.
Пневмоприсоски 6 также смонтированы на скалках 5 с помощью шарнира 7 и посредством трубопроводов соединены с источником рабочей среды. Шарнирно-рычажный механизм 2 снабжен пружиной 8 для возврата зажимных губок в разжатое состояние. Изменение положения шарнирнорычажного механизма 2 относительно скалок 5 позволяет регулировать усилие воздействия зажимных губок 3 на объект манипулирования и величину хода этих губок в клещевом охвате манипулятора. В корпусе на оси 9 смонтирована установочная штанга 10 с винтами для регулирования положения присосок относительно корпуса 1. На оси 9 смонтирован также зажим для закрепления клещевого схвата в процессе переналадки захвата на пневматический. Зажим выполнен в виде сухаря И с установочной плоскостью, соответствующей форме рабочих поверхностей зажимных губок 3 и фиксирующей скобы 12. Штанга 10 и скоба 12 установлены на оси 9 с возможностью перестановки и фиксации посредством гаек.
Захват работает следующим образом. После подачи рабочей среды по трубопроводам в Пневмоприсоски они перемещаются по направлению к корпусу 1, соприкасаясь с ним, что обеспечивает перемещение звеньев шарнирно-рычажного механизма и раскрытие зажимных губок клещевого захвата. После прекращения подачи рабочей среды на присоски они отсоединяются от корпуса, пружина 8 возвращает присоски
в первоначальное положение, определяется штангой 10, зажимные губки сходятся, захватывая деталь.
Переналадка клещевого захвата на пневматический происходит следующим образом.
Освобождается винт 13, шарнирно-рычажный механизм 2 разворачивается относительно корпуса 1 на 180° путем перестановки осей 14. Губки 3 входят во взаимодействие с сухарем. 11 и фиксируются скобой 12. Таким образом осуществляется разворот присосок 6 и переналадка всего захвата на пневматический.
Данный захват позволяет расширить технологические возможности захватов путем его переналадки и перенастройки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой схват манипулятора | 1984 |
|
SU1168376A1 |
| Клещевой захват | 1989 |
|
SU1761460A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| Устройство для вскрытия люков барабанной мельницы | 1991 |
|
SU1768291A1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Головка манипулятора | 1990 |
|
SU1811485A3 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
| РЫЧАЖНО-КЛЕЩЕВОЙ ЗАХВАТ ДЛЯ ЗАКРЕПЛЕНИЯ ОБРАЗЦОВ ПРИ ИСПЫТАНИИ НА РАСТЯЖЕНИЕ | 1990 |
|
RU2017112C1 |
1. ЗАХВАТ МАНИПУЛЯТОРА, содержащий корпус, привод и шарнирно-рычажные механизмы, жестко соединенные с зажимными губками, отличающийся тем, что, с целью расширения технологических возможностей захвата за счет регулирования величины хода и силы сжатия каждой губки, он снабжен установленной в корпусе штангой с винтами и скалками, а привод выполнен в виде пневматических присосок, шарнирно установленных на скалках, соединенных с возможностью осевого перемещения с шарнирно-рычажными механизмами и с возможностью взаимодействия со штангой с винтами. 2. Захват по п. 1, отличающийся тем, что, с целью расширения технологических возможностей путем переналадки клещевого захвата на пневматический, он снабжен расположенным в корпусе приспособлением для переналадки, выполненным в виде закрепленного на оси зажима, установочная поверхность которого выполнена по форме рабочих поверхностей зажимных губок. (Л 1C Од 4 00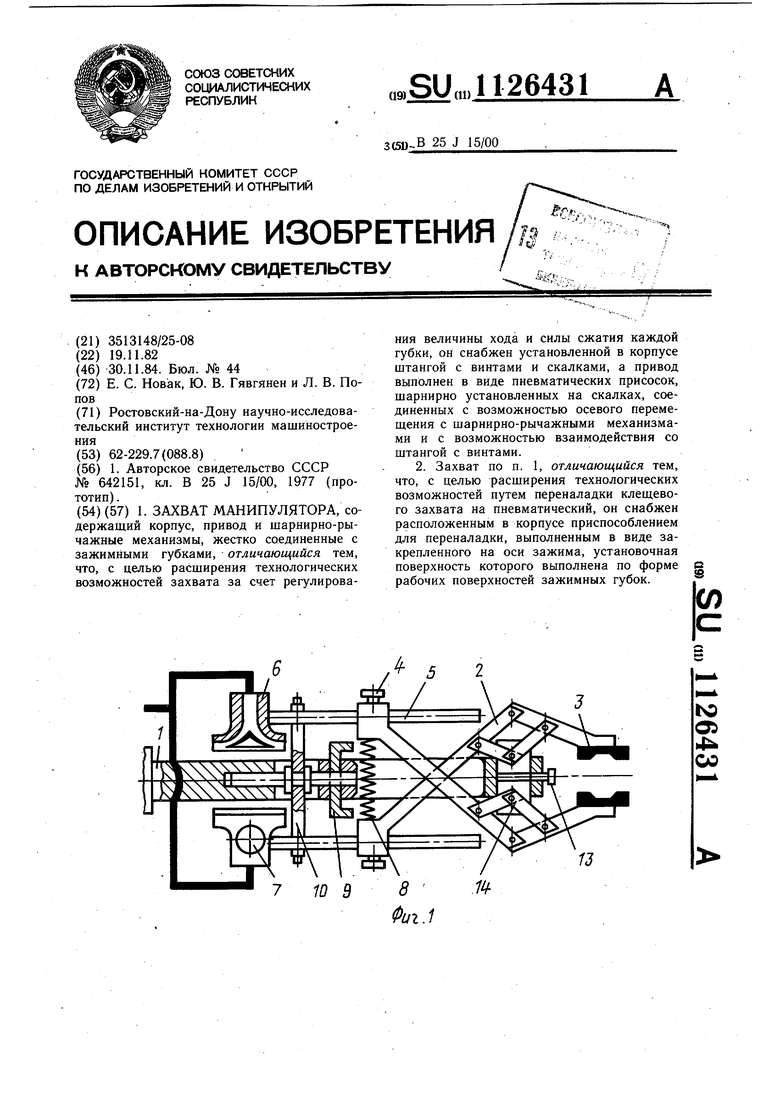
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
