1
Изобретение относится к технологическому оборудованию, применяемому для механизации и автоматизации технологических процессов и может быть использовано в конструкциях промншленных роботов и манипуляторов.
Известен захват манипулятора, содержащий корпус, привод поступательного перемещения и. зажимные губки, связанные со штоком привода ерез шарнирно-рычажный механизм, в которо от одного привода обеспечивается первоначальное продольное движение губок в сторону детали и дальнейшее их поперечное движение для зажатия детали l .
В известном захвате из-за значительной массы подвижных деталей необходим привод сравнительно большой мощности. При выполнении привода в виде силового цилиндра увеличиваются его габариты.
Цель изобретения - уменьшение габаритов и.;требуемой мощности привода
Это достигается тем, что на штоке силового цилиндра привода жестко закреплен клин, а также установлена пружинная кулиса, в которой образованы поперечные пазы, шарнирно-рычажный механизм выполнен в виде пан
тографов, причем на конце одного из рычагов каждого пантографа установлен взаимодействующий с клином ролик, ось которого подпружинена в пазу кулисы.
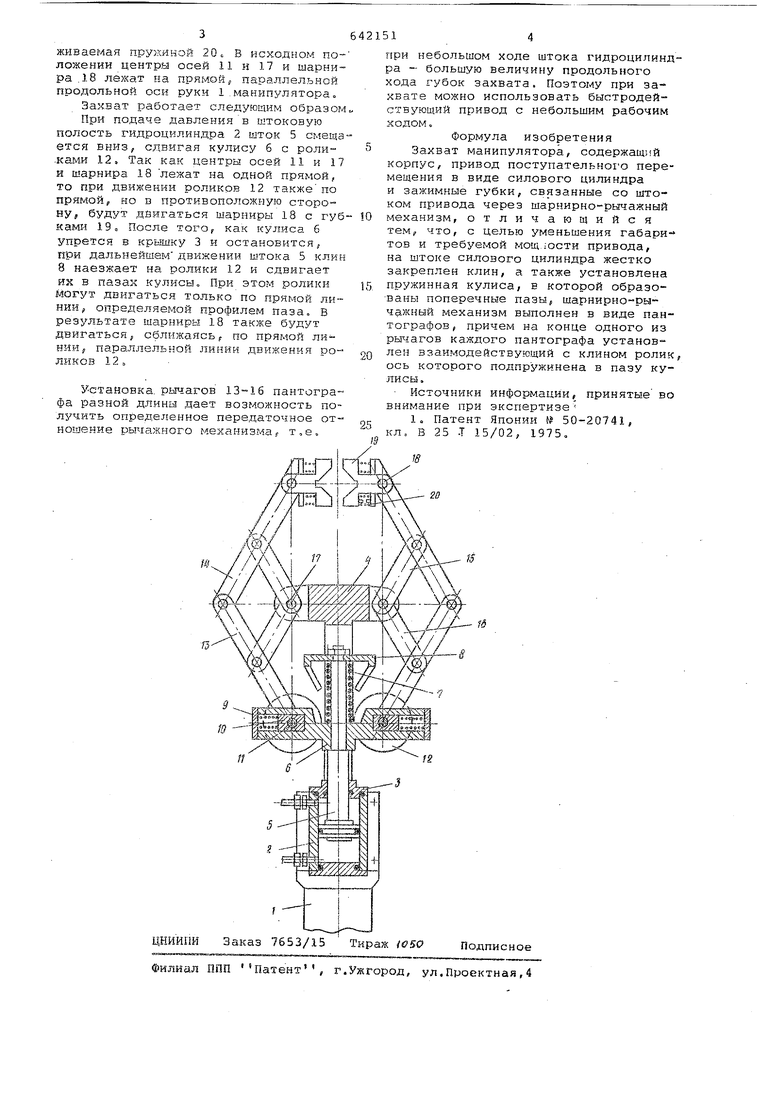
На чертеже показан предлагаемый захват манипулятора.
На конце руки 1 манипулятора крепится исполнительный силовой цилиндр, например гидроцилиндр 2, на крышке 3 которого установлен корпус 4. На штоке 5 гидроцилиндра подвижно установлена кулиса б, имеющая два. прямоугольных поперечньк паза. Кулиса поджимается к буртику штока 5 пружиной 7, второй конец которой упирается в закрепленный неподвижно на конце штока клин 8. В пазах кулисы б установлены поджатые пружинами 9 сухари 10, в которые вставлены оси 11 роликов -12. Оси установлены на концах рычагов 13. Каждый рычаг входит в состав механизма пантографа, который содержит также рычаги 14, 15 и 16. Рычаги 13 и 14 шарнирно связаны между собой, рычаги 15 и 16 шарнирно связаны с рьлчагами 14 и 13 соответственно, а также осью 1 - с корпусом 4. На конце рычага 14 в шарнире 18 установлена губка 19, поддер
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1977 |
|
SU663577A1 |
| Захватное устройство | 1977 |
|
SU662342A1 |
| Захват | 1977 |
|
SU667396A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| Захват манипулятора | 1978 |
|
SU963849A1 |
| Захватное устройство | 1984 |
|
SU1237422A1 |
| Схват манипулятора | 1988 |
|
SU1618646A1 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| Захватное устройство промышленного робота | 1987 |
|
SU1419878A1 |
