со
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват | 1985 |
|
SU1301694A1 |
| Устройство для изготовления отводов | 1989 |
|
SU1682006A1 |
| УСТРОЙСТВО для НАНИЗЫВАНИЯ НА ОСНОВУ ИГЛ ШВЕЙНЫХ МАШИН | 1972 |
|
SU323177A1 |
| Устройство для удаления отходов из рабочей зоны пресса | 1990 |
|
SU1759510A1 |
| АВТОМАТИЧЕСКОЕ ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2011 |
|
RU2471701C1 |
| Устройство для укладки изделий в тару | 1977 |
|
SU691349A1 |
| Устройство для ориентации, базирования и подачи листовой заготовки в рабочую зону пресса | 1991 |
|
SU1784376A1 |
| Машина для набора комплектов печатной продукции | 1988 |
|
SU1676980A1 |
| Автомат для сборки | 1987 |
|
SU1428561A2 |
| ТРАНСПОРТНЫЙ РОТОР | 1973 |
|
SU380432A1 |

Использование: в сборочных автоматах, транспортных роторных устройствах, в конструкциях загрузочных устройств различного технического оборудования, где необходима защита транспортируемых изделий от разрушения или деформации и быстрая переналадка на другой типоразмер изделий. Сущность изобретения, захват содержит подпружиненный фиксатор положения корпуса и несущий элемент со смонтированным в нем упором. Упор выполнен в виде ступенчатого стержня, поверхность которого имеет возможность взаимодействия с корпусом,а цилиндрическая поверхность - с фиксатором. При необходимости перемещения корпуса с зажатой деталью с заданным усилием относительно направляющих достаточно ввернуть или вывернуть упор в несущем элементе 1 з п ф-лы, 2 ил
Изобретение относится к клещевым за- хватам,применяемым в сборочных автоматах, транспортных роторных устройствах, в конструкциях загрузочных устройств различного технологического оборудования, где необходима защита транспортируемых изделий от разрушения или деформации и быстрая переналадка на другой типоразмер изделий.
Известны клещевые захваты (манипуляторы), содержащие силовой цилиндр, на штоке которого установлена подпружиненная ползушка и закреплен упор, взаимодействующий с ползушкой, двуплечие рычаги, проводимые в движение посредством копира и взаимодействующие каждый одним из концов с захватываемой деталью.
Данные захваты (манипуляторы) обеспечивают регулирование силы захвата однако это требует сложной системы
управления и сложной системы подачи энергоносителя при установке их на роторные линии.
Наиболее близким к изобретению является клещевой захват содержащий корпус в котором шарнирно закреплены подпружиненные губки с хвостовиками, установленными с возможностью взаимодействия с механизмом раскрывания губок, выполненным в виде кулачкового упора, механизм перемещения захвата имеющий штангу и установленный на корпусе жесткий упор.
В известном устройстве регулирование силы захвата осуществляется за счет использования силы пружин, прижимающей направляющие планки к корпусу
Недостатком данного захвата является сложность регулирования силы захвата обусловленное тем, что пружины действуют на захватывающие губки через величину сиVI
О
Ј о о
лы трения между корпусом и направляющими планками, которая зависит от условий эксплуатации и является величиной непостоянной.
Так, например, в случае попадания смазки между корпусом и направляющими корпус, легко преодолевая силы терния, может переместиться раньше, чем захват надежно зажмет транспортируемое изделие, что приведет к его выпадению, а при затирании рабочих поверхностей корпуса и направляющих или попадании посторонних предметов между ними сила захвата увеличивается, что приводит к разрушению или деформации траснпортируемого изделия, Кроме того, при переходе работы оборудования на другой типоразмер транспортируемых изделий требуется полная разработка клещевого захвата.
Целью изобретения является расширение технологических возможностей.
Указанная цель достигается тем, что клещевой захват, содержащий корпус, смонтированный в направляющих с возможностью перемещения, при этом в корпусе шарнирно закреплены подвижные губки с хвостовиками, имеющими возможность взаимодействия с механизмом раскрытия губок, выполненным в виде кулачкового упора, смонтированного на штанге механизма перемещения клещевого захвата, причем кулачок имеет возможность взаимодействия своей торцевой поверхностью с корпусом, он снабжен установленным в одной из, направляющих подпружиненным фиксатором положения корпуса и несущим элементом со смонтированным в нем упором, выполненным в виде ступенчатого стержня, имеющего возможность взаимодействия с корпусом торцевой поверхностью ступени, а с фиксатором - цилиндрической поверхностью, при этом штанга жестко связана с несущим элементом, причем ступенчатый стержень смонтирован в несущем элементе с возможностью наладочного перемещения.
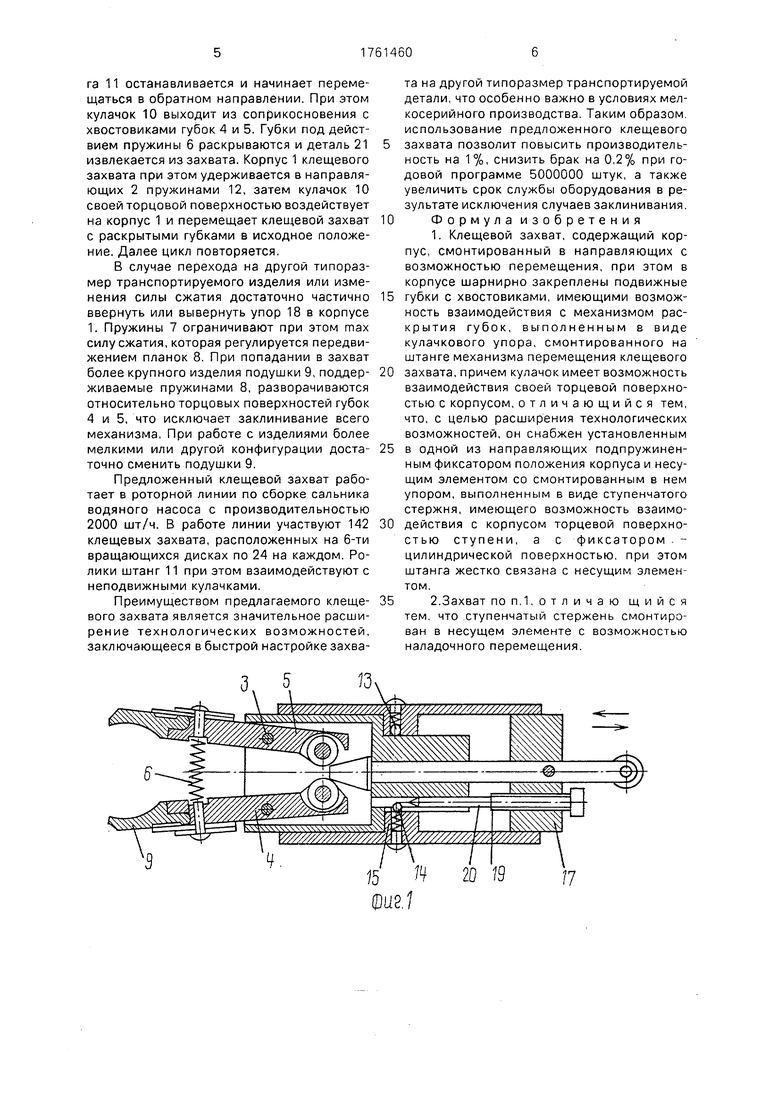
На фиг.1 представлен клещевой захват в исходном положении; на фиг.2 - то же, в момент сжатия (пунктиром - другой типоразмер зажимаемой детали).
Клещевой захват содержит корпус 1, размещенный с возможностью перемещения в направляющих 2. В корпусе 1 на осях 3 шарнирно закреплены подвижные губки 4 и 5, которые соединены пружиной 6. на губках 4 и 5 посредством плоских пружин 7 и планок 8 закреплены подушки 9. Кроме того, хвостовики губок 4 и 5 имеют возможность взаимодействия с механизмом раскрытия губок, выполненным в виде
кулачкового упора 10, смонтированного на штанге 11 механизма перемещения клещевого захвата, причем торцовая поверхность кулачкового упора 10 имеет возможность
контакта с корпусом 1. Направляющие 2 взаимодействуют с корпусом 1 посредством шариков 13 и 14. В корпусе 1 выполнено гнездо 15, имеющее возможность взаимодействия с шариком 14, подпружиненного
0 фиксатора 16 положения корпуса 1.
В направляющих 2 установлен несущий элемент 17 со смонтированным в нем регулирующим упором 18, выполненным в виде ступенчатого стержня, имеющего возмож5 ность взаимодействия с корпусом 1 торцевой поверхностью ступени 19, а с фиксатором 16 с цилиндрической поверхностью 20, при этом штанга 11 жестко соединена с несущим элементом 17.
0Усилие пружины 12 подбирается так,
чтобы сила прижатия шариков 13 и 14 к корпусу 1 превосходила усилие пружины 6, а усилие пружины 7 должно быть меньше силы, при которой зажимаемая деталь 21
5 может деформироваться или разрушаться. Таким образом, сила сжатия транспортируемой детали 21 будет зависеть от величины перемещения штанги 11, являющейся величиной const, и не зависеть при этом от силы
0 сжатия пружины 6.
Клещевой захват работает следующим образом.
В исходном положении губки 4 и 5 разжаты пружиной 6. При движении вперед
5 штанги 11 кулачок 10, взаимодействуя с хвостовиками губок 4 и 5, сжимает их. При этом шарик 14 препятствует перемещению корпуса 1 до тех пор, пока упор 18 не продавит его в гнездо 15, а губки 4 и 5 с подушками 9
0 не зажмут транспортируемое изделие 21. В это время поверхность 19 упора 18 начинает взаимодействовать с корпусом 1, который начинает перемещаться только при надежном зажиме транспортируемого изделия 21,
5 упор 18 выполняет роль ключа к движению корпуса, относительно направляющих 2, продавливая своей цилиндрической поверхностью 20 шарик 14 из гнезда 15 корпуса 1, исключая при этом преждевременный ход
0 корпуса 1 относительно направляющих 2, приводящий к сбою работы технологического оборудования.
При движения далее вперед штанги 10 корпус 1, преодолевая усилие пружин 12,
5 начинает выдвигаться из направляющих 2. При этом усилие сжатия транспортируемой детали 21 остается величиной постоянной, так как клиновый кулачок 10 уже не давит на хвостовики губок 4 и 5, а пружины 7 настроены на силу сжатия. В месте выгрузки штан
га 11 останавливается и начинает перемещаться в обратном направлении. При этом кулачок 10 выходит из соприкосновения с хвостовиками губок 4 и 5. Губки под действием пружины 6 раскрываются и деталь 21 извлекается из захвата. Корпус 1 клещевого захвата при этом удерживается в направляющих 2 пружинами 12, затем кулачок 10 своей торцовой поверхностью воздействует на корпус 1 и перемещает клещевой захват с раскрытыми губками в исходное положение. Далее цикл повторяется.
В случае перехода на другой типоразмер транспортируемого изделия или изменения силы сжатия достаточно частично ввернуть или вывернуть упор 18 в корпусе 1. Пружины 7 ограничивают при этом max силу сжатия, которая регулируется передвижением планок 8. При попадании в захват более крупного изделия подушки 9, поддер- живаемые пружинами 8, разворачиваются относительно торцовых поверхностей губок 4 и 5, что исключает заклинивание всего механизма. При работе с изделиями более мелкими или другой конфигурации достаточно сменить подушки 9.
Предложенный клещевой захват работает в роторной линии по сборке сальника водяного насоса с производительностью 2000 шт/ч. В работе линии участвуют 142 клещевых захвата, расположенных на 6-ти вращающихся дисках по 24 на каждом. Ролики штанг 11 при этом взаимодействуют с неподвижными кулачками.
Преимуществом предлагаемого клещевого захвата является значительное расширение технологических возможностей, заключающееся в быстрой настройке захва
а. s
3
0
5
0
5
0
5
та на другой типоразмер транспортируемой детали, что особенно важно в условиях мелкосерийного производства. Таким образом использование предложенного клещевого захвата позволит повысить производительность на 1%, снизить брак на 0,2% при годовой программе 5000000 штук, а также увеличить срок службы оборудования в результате исключения случаев заклинивания Формула изобретения 1. Клещевой захват, содержащий корпус, смонтированный в направляющих с возможностью перемещения, при этом в корпусе шарнирно закреплены подвижные губки с хвостовиками, имеющими возможность взаимодействия с механизмом раскрытия губок, выполненным в виде кулачкового упора, смонтированного на штанге механизма перемещения клещевого захвата, причем кулачок имеет возможность взаимодействия своей торцевой поверхностью с корпусом, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен установленным в одной из направляющих подпружиненным фиксатором положения корпуса и несущим элементом со смонтированным в нем упором, выполненным в виде ступенчатого стержня, имеющего возможность взаимодействия с корпусом торцевой поверхностью ступени, а с фиксатором - цилиндрической поверхностью, при этом штанга жестко связана с несущим элементом.
15 Щ 20 79 (№
П
со
| Клещевой захват | 1979 |
|
SU831515A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
